1.本实用新型涉及自动化设备技术领域,特别涉及一种多级伸展自动上料机构。
背景技术:
2.在印刷线路板的前序加工中,通常在内层板的特定位置预先设计定位靶标,并在压合后的外层铜箔表面通过钻靶机钻出内层定位靶孔,以便于后续加工工序识别精准对位。
3.目前,工厂均通过人工上板方式将待加工的线路板放置x-ray钻靶机,利用钻靶机中x光成像系统确定定位孔的位置从而钻孔。该上料方式不仅使用人工量大、效率低,而且x光存在辐射会对人体产生危害,因此市场迫切需求自动化上料设备代替人工作业。
技术实现要素:
4.本实用新型所要解决的问题是提供一种多级伸展自动上料机构,以克服现有上料方式使用人工量大、效率低、并且x光会对人体产生危害的缺陷。
5.本实用新型为了解决其技术问题所采用的技术方案是:一种多级伸展自动上料机构,包括:固定座、一级延展臂、二级滑移驱动模组、三级延展驱动组件、取料装置以及取料升降驱动模组,所述一级延展臂安装在所述固定座上并可相对进行滑动延展,所述三级延展驱动组件由所述二级滑移驱动模组控制在所述一级延展臂上做直线运动,所述取料装置与所述三级延展驱动组件连接由该三级延展驱动组件驱动进行滑动延展,所述取料升降驱动模组能够控制所述取料装置垂直移动。
6.作为本实用新型的进一步改进,所述一级延展臂通过滑块与所述固定座滑动配合连接,所述固定座上安装有第一驱动电机,所述第一驱动电机通过第一同步带轮传动组件驱动所述一级延展臂滑动。
7.作为本实用新型的进一步改进,所述三级延展驱动组件通过滑块与所述一级延展臂滑动配合连接,所述二级滑移驱动模组包括固定在所述一级延展臂上的第二驱动电机,所述第二驱动电机通过第二同步带轮传动组件驱动所述三级延展驱动组件滑动。
8.作为本实用新型的进一步改进,所述三级延展驱动组件包括一气缸,所述取料装置固定连接在所述气缸的气缸轴上。
9.作为本实用新型的进一步改进,所述取料装置包括吸盘固定板和若干吸盘,所述吸盘均安装在所述吸盘固定板的底部。
10.作为本实用新型的进一步改进,所述取料升降驱动模组包括第一安装板、固定在所述第一安装板上的第三驱动电机以及转动安装在所述第一安装板上的第一丝杆,所述第一安装板固定在外部的设备机架上,所述固定座滑动安装在所述第一安装板上并通过丝杆螺母与所述第一丝杆连接,所述第三驱动电机控制所述第一丝杆做旋转运动以带动所述固定座竖直滑动。
11.作为本实用新型的进一步改进,所述取料升降驱动模组包括第二安装板、固定在
所述第二安装板上的第四驱动电机以及转动安装在所述第二安装板上的第二丝杆,所述第二安装板与所述固定座滑动配合连接,所述三级延展驱动组件滑动安装在所述第二安装板上并通过丝杆螺母与所述第二丝杆连接,所述第四驱动电机控制所述第二丝杆做旋转运动以带动所述三级延展驱动组件竖直滑动。
12.本实用新型的有益效果是:本实用新型提供一种多级伸展自动上料机构,设置有一级延展臂和取料装置,取料装置通过级滑移驱动模组控制在一级延展臂上滑动,并且一级延展臂由第一驱动电机控制能够在固定座上进行延展,同时在取料装置上还设置有气缸,以驱动取料装置进一步延展便于伸入到设备中进行取放料操作,并由取料升降驱动模组控制取料装置垂直移动进行取放料,进而实现自动化上料,上料稳定可靠,大大提高生产效率,减少人工投入,避免在特殊环境下作业使人体受到危害,并且取放料具有较大行程,能够使料板通过高度有限的钻靶机入口,使用更加灵活,作为设备之间的过渡输送更有利于实现全自动化生产的需求。
附图说明
13.图1为本实用新型实施例一多级伸展自动上料机构的立体图;
14.图2为本实用新型实施例一去除取料升降驱动模组后的正视图;
15.图3为本实用新型实施例一多级伸展自动上料机构另一视角的立体图;
16.图4为本实用新型实施例二多级伸展自动上料机构的立体图。
17.结合附图,作以下说明:
18.601——固定座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
602——一级延展臂;
19.603——第一驱动电机;
ꢀꢀꢀꢀꢀ
604——第二驱动电机;
20.605——气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
606——吸盘固定板;
21.607——吸盘;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
608——第一安装板;
22.609——第三驱动电机;
ꢀꢀꢀꢀꢀ
610——第一丝杆;
23.611——第二安装板;
ꢀꢀꢀꢀꢀꢀꢀ
612——第四驱动电机。
具体实施方式
24.以下结合附图,对本实用新型两个较佳的实施例作详细说明。
25.实施例一
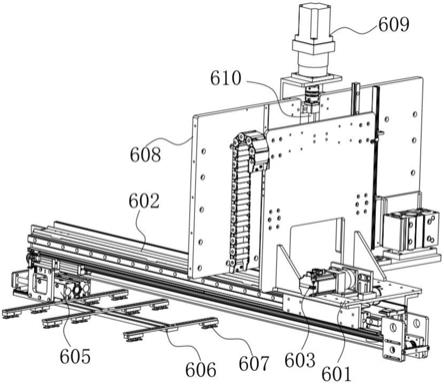
26.参阅图1至图3,本实用新型提供一种多级伸展自动上料机构,包括:固定座601、一级延展臂602、二级滑移驱动模组、三级延展驱动组件、取料装置以及取料升降驱动模组。一级延展臂602安装在固定座601上并可相对滑动进行一阶延展,三级延展驱动组件由二级滑移驱动模组控制在一级延展臂602上做直线运动进而二阶延展,取料装置与三级延展驱动组件连接由该三级延展驱动组件驱动滑动进行三阶延展,并由取料升降驱动模组控制取料装置垂直移动进行取放料,进而实现自动化上料,大大提高生产效率,减少人工投入,避免对人体造成危害,并且具有较大行程,使用灵活,能够作为设备之间的过渡输送,有利于实现全自动化生产的需求。
27.具体的,在固定座601的底部设置有相对的两侧板,两侧板的内侧均固定装设有滑块,一级延展臂602的两侧沿长度方向均安装有滑轨,两个滑块分别与两个滑块进行滑动配
合连接。固定座601上安装有第一驱动电机603以及第一同步带轮传动组件,第一同步带轮传动组件包括安装在第一驱动电机603的输出轴上的同步轮、转动安装在固定座601上的两个导向轮和同步带,该同步带绕经同步轮和导向轮其两端使用同步带压板固定在一级延展臂602的顶部靠近两端处。第一驱动电机603通过第一同步带轮传动组件驱动一级延展臂602相对固定座601滑动。
28.参阅图3,二级滑移驱动模组包括固定在一级延展臂602一端部的第二驱动电机604和第二同步带轮传动组件,第二同步带轮传动组件包括两个同步轮和同步带,其中一同步轮安装在第二驱动电机604的输出轴上,另一同步轮转动安装在一级延展臂602远离第二驱动电机604的一端,同步带绕设在两个同步轮上。三级延展驱动组件包括气缸605和气缸固定板,气缸605安装在气缸固定板上,气缸固定板通过一同步带压板与同步带固定连接。气缸固定板的顶部固定安装有两个滑块,一级延展臂602的底部沿长度方向还安装有另外两个滑轨,该两个滑块分别与两个滑块进行滑动配合连接,进而第二驱动电机604通过第二同步带轮传动组件驱动三级延展驱动组件相对一级延展臂602滑动。
29.取料装置固定连接在气缸605的气缸轴上,由气缸605驱动移动进一步延展,以便于进行取放料。取料装置包括有三个平行布置的吸盘固定板606和若干吸盘607,每个吸盘固定板606的底部均安装有多个吸盘607,并且吸盘607均与真空发生器连接,用于在吸盘607上产生吸力将工件吸附。此外,为了使取料装置在气缸605的驱动下能够稳定滑动,在气缸固定板的底部同样安装有另一滑块,吸盘固定板606上安装有与之配套的滑轨,滑块滑配在该滑轨上。
30.参阅图1,取料升降驱动模组包括第一安装板608、固定在第一安装板608上的第三驱动电机609以及转动安装在第一安装板608上的第一丝杆610,第一安装板608固定在外部的设备机架上,固定座601滑动安装在第一安装板608上并通过丝杆螺母与第一丝杆610连接。第三驱动电机609控制第一丝杆610做旋转运动以带动固定座601竖直滑动,进而带动一级延展臂602、二级滑移驱动模组、三级延展驱动组件以及取料装置整体上下移动,使吸盘607能够抓取工件,并投放到指定位置。
31.其中,第一驱动电机603、第二驱动电机604以及第三驱动电机609均采用安装有减速机的伺服电机,以实现高精度上料。
32.实施例二
33.参阅图4,本实施例与实施例一的区别在于:固定座601固定在外部的设备机架上,取料升降驱动模组包括第二安装板611、固定在第二安装板611上的第四驱动电机612以及转动安装在第二安装板611上的第二丝杆。第二安装板611的顶部安装有两个滑块,该滑块滑配在固定座601底部的两个滑轨上。第二安装板611的两外侧沿竖直方向同样也安装有滑轨,气缸固定板通过其上的滑块滑配在该滑轨上,并且气缸固定板通过丝杆螺母与第二丝杆连接。第四驱动电机612通过同步带轮传动组件与第二丝杆连接,控制第二丝杆做旋转运动以带动气缸固定板相对第二安装板611沿竖直方向滑动,进而带动三级延展驱动组件以及取料装置竖直上下移动进行取放料。
34.相较于实施例一,本实施例取料升降驱动模组只通过驱动三级延展驱动组件和取料装置上下移动,同样可实现吸盘607取放料操作,进而能够在一定程度上减小设备体积,节省占用空间,以方便进行使用。
35.由此可见,本实用新型一种多级伸展自动上料机构设置有一级延展臂和取料装置,取料装置通过级滑移驱动模组控制在一级延展臂上滑动,并且一级延展臂由第一驱动电机控制能够在固定座上进行延展,同时在取料装置上还设置有气缸,以驱动取料装置进一步延展便于伸入到设备中进行取放料操作,并由取料升降驱动模组控制取料装置垂直移动进行取放料,进而实现自动化上料,上料稳定可靠,大大提高生产效率,减少人工投入,避免在特殊环境下作业使人体受到危害,并且取放料具有较大行程,使用灵活,能够作为设备之间的过渡输送,有利于实现全自动化生产的需求。
36.在以上的描述中阐述了很多具体细节以便于充分理解本实用新型。但是以上描述仅是本实用新型的较佳实施例而已,本实用新型能够以很多不同于在此描述的其它方式来实施,因此本实用新型不受上面公开的具体实施的限制。同时任何熟悉本领域技术人员在不脱离本实用新型技术方案范围情况下,都可利用上述揭示的方法和技术内容对本实用新型技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本实用新型技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。