1.本实用新型涉及无人机电池抓取领域,具体地说,是涉及一种无人机电池抓取装置。
背景技术:
2.无人机是一种以无线电遥控或由自身程序控制为主的不载人飞机,机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收。
3.现有无人机电池抓取装置中的电池固定不稳定,抓取及上升时易产生轻微的晃动,更换电池时需要人工协助才能完成电池的更换,自动化程度低,难以满足大量无人机电池更换的需求。
技术实现要素:
4.本实用新型的目的在于提供一种无人机电池抓取装置,以解决现有技术中存在的电池固定不稳定,抓取及上升时易产生轻微晃动的问题。
5.为了解决上述问题,本实用新型提供如下技术方案:
6.一种无人机电池抓取装置包括电池座、位于电池座内的电池盒、用于抓取电池盒的抓取机构,电池盒的两相对边上分别设有至少两个锁定机构;锁定机构包括锁杆和位于电池盒侧壁的凹槽,锁杆与凹槽的外边缘转动连接,凹槽内底部和位于其上方的锁杆面之间设有复位弹簧,凹槽外的锁杆端卡于电池座上;复位弹簧处于正常状态时,凹槽内的锁杆通过复位弹簧支撑,使位于凹槽的锁杆锁定于电池座上,使电池座和电池盒连接稳固,电池盒的位置稳固精准便于抓取机构准确抓取。
7.进一步的,电池座的底部设有多个导向柱,导向柱关于电池座中心对称;电池盒底部对应位置设有与导向柱配合的导向孔;一般设置两个导向柱,分别位于电池盒短边对应的电池座上,锁定机构一般设置在电池盒的两个长边侧。
8.进一步的,导向柱的顶端为锥形;锥形的导向柱本身就具有很强的导向功能,与导向孔配合使电池盒的位置更加准确。
9.进一步的,抓取机构包括抓取架,抓取架两相对内壁之间滑动设有水平板,抓取架的外顶部设有升降电机,升降电机的转轴穿过抓取架与水平板螺纹连接带动水平板升降;水平板上设有双轴水平电机,双轴水平电机的双轴上分别连接有抓手机构;升降电机带动水平板及其上的双轴水平电机升降,进而带动抓手升降,通过双轴水平电机带动抓手水平运动调整至电池盒锁定机构位置。
10.进一步的,抓取架两相对侧壁上分别设有多个导轨,导轨上设有滑块,滑块与水平板侧壁连接;一般在电池盒上的两个长边上分别设置两个锁定机构即可达到电池盒稳定抓
取和提升的目的。
11.进一步的,抓手机构包括联轴器,双轴水平电机的双轴分别通过联轴器连接有滚珠丝杆,滚珠丝杆的自由端与对应的滑块连接;滚珠丝杆上连接有丝杆螺母,丝杆螺母的底部连接有安装板,安装板底部安装有多个抓手;电池盒侧的锁定机构的数量与其同侧的抓手数量相等,且相邻抓手之间的距离和相邻锁定机构之间的距离相等;双轴水平电机的双轴通过滚珠丝杆带动丝杆螺母水平移动,进而带动抓手水平移动。
12.进一步的,抓手的底部为l型或c型,抓取电池盒时抓手的底部位于凹槽内压下凹槽内的锁杆。
13.进一步的,锁杆包括相互连接的上段和下段,上段和下段之间形成钝角,上段位于凹槽内,下段为l型或c型卡于电池座上。
14.进一步的,上段和下段的连接处与凹槽外边缘之间铰接;也可选择其他转动连接方式连接。
15.与现有技术相比,本实用新型具有以下有益效果:
16.(1)本实用新型中电池盒的底部通过导向柱与电池座底部固定,电池盒侧壁的凹槽内复位弹簧处于展开状态,支撑凹槽内的锁杆,凹槽外的锁杆卡于电池座上,本实用新型通过导向柱和锁定机构使电池座和电池盒连接稳固,电池盒的位置稳固精准便于抓取机构准确抓取。
17.(2)本实用新型中抓手机构配合电池盒上的多个锁定机构,完成自动开锁使电池盒和电池座分离,抓取电池盒稳定上升。
附图说明
18.图1为电池盒和电池座的结构示意图。
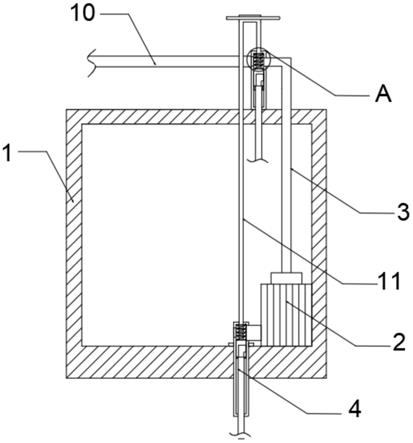
19.图2为电池盒位于电池座内的剖面结构示意图。
20.图3为图2中a部分的放大结构示意图。
21.图4为抓取机构抓取电池盒的构示意图。
22.图5为双轴水平电机位置结构示意图。
23.上述附图中,附图标记对应的部件名称如下:
24.1-电池座,2-电池盒,3-凹槽,4-复位弹簧,5-锁杆,6-导向柱,7-抓取架,8-升降电机,9-双轴水平电机,10-抓手,11-导轨,12-滑块,13-水平板,14-联轴器,15-滚珠丝杆,16-丝杆螺母,17-上段,18-下段,19-安装板。
具体实施方式
25.下面结合附图和实施例对本实用新型作进一步说明,本实用新型的实施方式包括但不限于下列实施例。
26.实施例1
27.如图1至图5所示,一种无人机电池抓取装置包括电池座1、位于电池座1内的电池盒2、用于抓取电池盒2的抓取机构,电池盒2的两相对边上分别设有两个锁定机构;锁定机构包括锁杆5和位于电池盒2侧壁的凹槽3,锁杆5与凹槽3的外边缘转动连接,凹槽3内底部和位于其上方的锁杆5面之间设有复位弹簧4,凹槽3外的锁杆5端卡于电池座1上;复位弹簧
4处于正常状态时,凹槽3内的锁杆5通过复位弹簧支撑,使位于凹槽3的锁杆5锁定于电池座1上,使电池座1和电池盒2连接稳固,电池盒2的位置稳固精准便于抓取机构准确抓取;抓取时,抓手10将凹槽3内的锁杆5压下,复位弹簧处于压缩状态,凹槽3外的锁杆5松开电池座1;也可设置更多的锁定机构;复位弹簧也可选择其他具体弹性的部件代替,如弹簧片等。
28.实施例2
29.如图1至图5所示,在实施例1的基础上更进一步的,锁杆5包括相互连接的上段17和下段18,上段17和下段18之间形成钝角,上段17位于凹槽3内,下段18为l型或c型卡于电池座1上;上段17和下段18的连接处与凹槽3外边缘之间铰接;也可选择其他转动连接方式连接。
30.实施例3
31.如图1至图5所示,在实施例1的基础上更进一步的,电池座1的底部设有多个导向柱6,导向柱6关于电池座1中心对称;电池盒2底部对应位置设有与导向柱6配合的导向孔;一般设置两个导向柱6,分别位于电池盒2短边对应的电池座1上,锁定机构一般设置在电池盒2的两个长边侧;导向柱6的顶端为锥形;锥形的导向柱6本身就具有很强的导向功能,与导向孔配合使电池盒2的位置更加准确。
32.实施例4
33.如图1至图5所示,本实施例与实施例1的不同点在于,抓取机构包括抓取架7,抓取架7两相对侧壁上分别设有导轨11,导轨11上设有滑块12;两个滑块之间连接有水平板13;抓取架7的外顶部设有升降电机8,升降电机8的转轴连接有螺杆,螺杆穿过抓取架7与水平板13螺纹连接,升降电机8带动水平板13升降;双轴水平电机9设置在水平板13上,双轴水平电机9的双轴上分别连接有抓手机构。
34.实施例5
35.如图1至图5所示,本实施例在实施例4的基础上更进一步的,抓手机构包括联轴器14,双轴水平电机9的双轴分别通过联轴器14连接有滚珠丝杆15,滚珠丝杆15的自由端与对应的滑块12连接;滚珠丝杆15上连接有丝杆螺母16,丝杆螺母16的底部连接有安装板19,安装板19的底部安装有多个抓手10,电池盒侧的锁定机构的数量与其同侧的抓手数量相等,且相邻抓手之间的距离和相邻锁定机构之间的距离相等;双轴水平电机9的双轴通过滚珠丝杆15带动丝杆螺母16水平移动,进而带动抓手10水平移动;抓手10的底部为l型或c型,抓取电池盒2时抓手10的底部位于凹槽3内压下凹槽3内的锁杆5。
36.本实用新型的原理如下:
37.未抓取时,电池盒2的底部通过导向柱6与电池座1底部固定,电池盒2侧壁的凹槽3内复位弹簧处于展开状态,支撑凹槽3内的锁杆5,凹槽3外的锁杆5卡于电池座1上,本实用新型通过导向柱6和锁定机构使电池座1和电池盒2连接稳固,电池盒2的位置稳固精准便于抓取机构准确抓取。
38.抓取时,升降电机8带动水平板13下降,然后水平板13上的双轴水平电机9带动抓手10移动至凹槽3处,抓手10的底部压下凹槽3内锁杆5的上段17使锁杆5的下段18松开电池座1,抓手10位于凹槽3内,升降电机8带动抓手10移动实现电池盒2的抓取。
39.本实用新型在实际使用时会配合无人机的电池更换系统,实现抓手10的升降及水平移动的自动化操作,抓手10的升降及水平移动的自动化属于常规现有的技术,在此不做
累述。
40.按照上述实施例,便可很好地实现本实用新型。值得说明的是,基于上述结构设计的前提下,为解决同样的技术问题,即使在本实用新型上做出的一些无实质性的改动或润色,所采用的技术方案的实质仍然与本实用新型一样,故其也应当在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。