1.本实用新型属于码垛机技术领域,具体涉及一种智能码垛机抓手。
背景技术:
2.码垛机是一种用来有序堆放或排列货物的设备,可以实现自动堆码,随着科技工业自动化的发展,不仅效率提高几十倍,生产成本也降低了,这些码垛机夜以继日地工作,从不要求增加工资。
3.目前,专利号为cn201921624638.7的实用新型公开了一种灌装生产线码垛机抓手,包括机架、夹爪,机架由上托盘、下托盘和位于上托盘和下托盘之间的空心圆柱组成;上托盘处设有一号气缸,一号气缸的活塞杆伸入空心圆柱内;下托盘上设有二根以上的固定立柱,固定立柱等间距布置在空心圆柱的外周;一号气缸的活塞杆端部设有设有气缸活动连接柱,气缸活动连接柱侧壁设有三个以上气缸连接板,空心圆柱上设有沿空心圆柱轴向方向布置槽道,槽道长度和空心圆柱高度等长,夹爪的顶端通过连接杆和气缸连接板连接;空心圆柱的底部外周设有和气缸连接板数量相等的的固定连接板,夹爪的中部设有铰链点,固定连接板和铰链点铰链。本实用新型中抓取定位精准,可靠性强,被抓桶体不易脱落。但是该申请方案中的码垛机其机械抓手无法直接称重,只能而先用称称重再分类,使用起来不是很方便。
4.因此,针对上述抓手无法直接称重的问题,亟需得到解决,以改善抓手的使用场景。
技术实现要素:
5.(1)要解决的技术问题
6.针对现有技术的不足,本实用新型的目的在于提供一种智能码垛机抓手,该抓手旨在解决现有技术下无法直接称重,只能而先用称称重再分类,使用起来不是很方便的技术问题。
7.(2)技术方案
8.为了解决上述技术问题,本实用新型提供了这样一种智能码垛机抓手,该抓手包括底座、设置于所述底座上侧用于转动的固定箱、设置于所述固定箱上侧用于伸缩的机械臂模块、设置于所述机械臂模块端部用于称重的称重模块;其中,所述称重模块下侧设有用于抓取物品的勾爪模块,所述称重模块内侧设有距离传感器,所述底座下侧设有用于支撑的支撑脚,所述底座内侧设有用于驱动所述固定箱转动的第一电机,所述固定箱上侧设有用于支撑所述固定箱的支撑台,所述第一电机的输出轴设置在所述固定箱下侧。
9.使用本技术方案的抓手时,先将整个装置固定在码垛机的上侧,使其与码垛机连成一体,然后启动该装置,机械臂模块开始运作,将其端部固定的勾爪模块向货物靠近,然后启动勾爪模块将货物夹住,再向上抬起,于此同时,称重模块中的距离传感器受到感应,测量出称重模块和勾爪模块下降的距离,根据长度乘系数等于重量,可知物品重量与皮筋
长度成正比,然后计算出皮筋的重量就可以知道物品的重量,然后启动底座内侧的第一电机,将货物移至在多码机的堆码平台上,再放下机械臂模块,松开勾爪模块,将货物放下,然后重复以上操作搬运下一批货物;通过称重模块的设置,可以根据勾爪模块下移位置来测量处下移距离,再根据公式可以计算出皮筋的重量,从而可以知道物品的重量,可以根据不同的要求执行重量不同的分类,更好地将货物分开堆放,使用起来十分方便,通过第一电机的设置,可以改变整个固定箱以及其上侧各个模块的朝向,更加准确地对货物进行抓取和分类。
10.优选地,所述机械臂模块包括第二电机,所述第二电机的输出轴设有用于减速的齿轮组,所述齿轮组内侧设有用于左右转动的第一机械臂。通过齿轮组的设置,可以用来给第一机械臂减速,避免在货物较重的情况下第一机械臂发生偏移。
11.进一步的,所述第一机械臂上侧设有用于上下转动的第二机械臂,所述第一机械臂外侧设有电机箱,所述电机箱内侧设有用于驱动所述第二机械臂转动的第三电机。通过第三电机的设置,可以改变第二机械臂与第一机械臂之间的倾斜角度,从而改变第二机械臂的位置,更加精准地对货物进行夹取。
12.更进一步的,所述称重模块包括超声波测距板,所述距离传感器设置在所述超声波测距板内侧,所述超声波测距板上侧设有用于连接所述第二机械臂的连接板,所述超声波测距板下侧设有用于固定所述勾爪模块的固定板。通过超声波测距板和固定板的设置,可以更好地将勾爪模块固定住,避免勾爪模块与称重模块脱离。
13.更进一步的,所述超声波测距板和所述固定板之间设有用于拉伸的皮筋,所述皮筋外侧设有用于复位的弹性元件,所述弹性元件外侧设有用于导向的限位滑杆,所述限位滑杆上侧设有用于防脱落的固定器。通过皮筋的设置,使得距离传感器能够测量出皮筋的长度,测量出称重模块和勾爪模块下降的距离,以便得出货物的重量。
14.更进一步的,所述勾爪模块包括驱动箱,所述驱动箱前侧设有第四电机,所述第四电机的输出轴设有转动齿轮,所述转动齿轮左侧设有握杆,所述握杆与所述转动齿轮之间为啮合连接。第四电机转动驱动转动齿轮转动,从而带动握杆向上或向下移动,可以改变握杆下侧伸缩架的位置。
15.更进一步的,所述握杆外侧设有用于伸缩的伸缩架,所述伸缩架外侧设有用于转动的转动架,所述转动架通过轴设置在所述驱动箱内侧,所述转动架外侧设有用于夹取物体的夹爪,所述夹爪内侧设有用于防滑的防滑垫。伸缩架位置改变后可以带动转动架转动,从而带动两个夹爪相互靠近或相互远离,实现对货物的夹取或放下。
16.(3)有益效果
17.与现有技术相比,本实用新型的有益效果在于:本实用新型的抓手通过称重模块的设置,可以根据勾爪模块下移位置来测量处下移距离,再根据公式可以计算出皮筋的重量,从而可以知道物品的重量,可以根据不同的要求执行重量不同的分类,更好地将货物分开堆放,使用起来十分方便,通过第一电机的设置,可以改变整个固定箱以及其上侧各个模块的朝向,更加准确地对货物进行抓取和分类。
附图说明
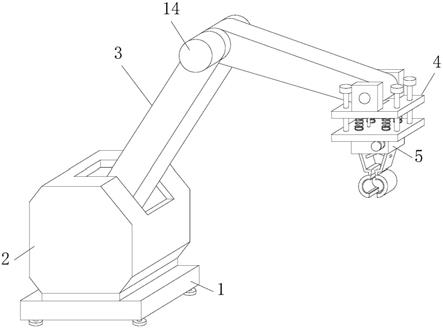
18.图1为本实用新型抓手一种具体实施方式的结构示意图;
19.图2为本实用新型抓手一种具体实施方式的剖视图;
20.图3为本实用新型抓手一种具体实施方式中称重模块的结构示意图;
21.图4为本实用新型抓手一种具体实施方式中勾爪模块的结构示意图;
22.图5为本实用新型抓手一种具体实施方式中勾爪模块的剖视图。
23.附图中的标记为:1、底座;2、固定箱;3、机械臂模块;4、称重模块;5、勾爪模块;6、支撑脚;7、第一电机;8、支撑台;9、距离传感器;10、第二电机;11、齿轮组;12、第一机械臂;13、第二机械臂;14、电机箱;15、第三电机;16、超声波测距板;17、连接板;18、皮筋;19、弹性元件;20、固定板;21、限位滑杆;22、固定器;23、驱动箱;24、第四电机;25、转动齿轮;26、握杆;27、伸缩架;28、转动架;29、夹爪;30、防滑垫。
具体实施方式
24.本具体实施方式是一种智能码垛机抓手,其结构示意图如图1所示,其剖视图如图2所示,该抓手包括底座1、设置于底座1上侧用于转动的固定箱2、设置于固定箱2上侧用于伸缩的机械臂模块3、设置于机械臂模块3端部用于称重的称重模块4;称重模块4下侧设有用于抓取物品的勾爪模块5,称重模块4内侧设有距离传感器9,底座1下侧设有用于支撑的支撑脚6,底座1内侧设有用于驱动固定箱2转动的第一电机7,固定箱2上侧设有用于支撑固定箱2的支撑台8,第一电机7的输出轴设置在固定箱2下侧。
25.针对本具体实施方式,距离传感器9的型号和规格体可以根据需要进行设定。
26.其中,机械臂模块3包括第二电机10,第二电机10的输出轴设有用于减速的齿轮组11,齿轮组11内侧设有用于左右转动的第一机械臂12,第一机械臂12上侧设有用于上下转动的第二机械臂13,第一机械臂12外侧设有电机箱14,电机箱14内侧设有用于驱动第二机械臂13转动的第三电机15,称重模块4包括超声波测距板16,距离传感器9设置在超声波测距板16内侧,超声波测距板16上侧设有用于连接第二机械臂13的连接板17,超声波测距板16下侧设有用于固定勾爪模块5的固定板20,超声波测距板16和固定板20之间设有用于拉伸的皮筋18,皮筋18外侧设有用于复位的弹性元件19,弹性元件19外侧设有用于导向的限位滑杆21,限位滑杆21上侧设有用于防脱落的固定器22,勾爪模块5包括驱动箱23,驱动箱23前侧设有第四电机24,第四电机24的输出轴设有转动齿轮25,转动齿轮25左侧设有握杆26,握杆26与转动齿轮25之间为啮合连接,握杆26外侧设有用于伸缩的伸缩架27,伸缩架27外侧设有用于转动的转动架28,转动架28通过轴设置在驱动箱23内侧,转动架28外侧设有用于夹取物体的夹爪29,夹爪29内侧设有用于防滑的防滑垫30。握杆26的型号和规格体可以根据需要进行设定。
27.该抓手称重模块的结构示意图如图3所示,其勾爪模块的结构示意图如图4所示,其勾爪模块的剖视图图如图5所示。
28.在此还需要特别说明的是,夹爪29的样式可以根据需要进行设定。
29.使用本技术方案的抓手时,先将整个装置固定在码垛机的上侧,使其与码垛机连成一体,然后启动该装置,机械臂模块3开始运作,将其端部固定的勾爪模块5向货物靠近,然后启动勾爪模块5将货物夹住,再向上抬起,于此同时,称重模块4中的距离传感器9受到感应,测量出称重模块4和勾爪模块5下降的距离,根据长度乘系数等于重量,可知物品重量与皮筋18长度成正比,然后计算出皮筋18的重量就可以知道物品的重量,然后启动底座1内
侧的第一电机7,将货物移至在多码机的堆码平台上,再放下机械臂模块3,松开勾爪模块5,将货物放下,然后重复以上操作搬运下一批货物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。