1.本发明的一个方面涉及搬运系统及网格系统。
背景技术:
2.已知一种搬运系统,具备多个搬运台车、和控制多个搬运台车的控制器。作为这种技术,例如在专利文献1中公开了一种台车在网格状的行驶路径上搬运集装箱的系统。在专利文献1所公开的系统中,台车在行驶时占有行驶路径的两个方格,在集装箱移载时,通过梁旋转,从而占有行驶路径的三个方格。所占有的区域(封锁区域)为其他台车无法通过的区域。
3.专利文献1:国际公开第2019/101725号
4.在上述那样的系统中,例如伴随着近年来的日益的普及扩大,希望提高搬运台车的搬运效率。
技术实现要素:
5.本发明的一个方面的目的在于提供能够使搬运台车的搬运效率提高的搬运系统及网格系统。
6.本发明的一个方面所涉及的搬运系统具备多个搬运台车、和控制多个搬运台车的控制器,其中,搬运台车具有:使该搬运台车行驶的行驶部;和相对于行驶部沿水平方向移动来在与载置台之间移载物品的移载部,控制器在通过搬运台车使物品在与载置台之间移载的移载时进行封锁控制,封锁控制禁止除该搬运台车以外的其他搬运台车进入与在俯视时当物品的移载时该搬运台车所占有的区域对应的封锁区域,搬运台车在将物品在与载置台之间移载的情况下,沿着从第一方向访问该载置台的路径行驶,搬运台车从第一方向访问该载置台时的封锁区域的面积为搬运台车从与第一方向不同的第二方向访问该载置台时的封锁区域的面积以下。
7.在该搬运系统中,当搬运台车移载物品时,能够抑制封锁区域的面积变大。因此,不易妨碍其他搬运台车的行驶。由此,能够使搬运台车的搬运效率提高。
8.在本发明的一个方面所涉及的搬运系统中,也可以是搬运台车设置为能够沿着在俯视时配置成格子状的行驶路径行驶,第一方向为与第二方向垂直的方向,封锁区域以与导轨的方格对应的单元格为单位进行划分,封锁区域的面积的大小与划分封锁区域的单元格的数量的大小对应。在该情况下,在搬运台车沿着在俯视时配置成格子状的行驶路径行驶的系统中,能够使搬运台车的搬运效率提高。
9.在本发明的一个方面所涉及的搬运系统中,也可以是行驶路径为沿水平方向延伸且被悬吊的导轨,行驶部具有在导轨上滚动的行驶车轮,移载部具有在导轨的下侧保持物品的物品保持部。在该情况下,在所谓的网格系统中,能够使搬运台车的搬运效率提高。
10.在本发明的一个方面所涉及的搬运系统中,也可以是在控制器存储有将多个载置台、与针对访问载置台的多个访问方向的每一个确定且与封锁区域的面积相关的信息相互
建立了关联的映射(map),控制器利用映射,来将封锁区域的面积最小的访问方向决定为第一方向。由此,能够高效地使移载物品时的封锁区域的面积最小化。
11.在本发明的一个方面所涉及的搬运系统中,也可以是控制器在决定了由搬运台车访问的载置台之后,针对访问该载置台的多个访问方向的每一个运算与封锁区域的面积相关的信息,并基于运算出的信息来将封锁区域的面积最小的访问方向决定为第一方向。由此,由于搬运台车每次访问载置台时都运算该信息而决定第一方向,因此即使产生搬运台车的行驶环境等由于某些原因临时发生了变化那样的状况,也能够根据该状况可靠地将移载物品时的封锁区域的面积最小化。
12.在本发明的一个方面所涉及的搬运系统中,也可以是搬运台车的移载部在水平面内沿与搬运台车的行驶方向垂直的方向相对于行驶部移动,搬运台车从第一方向访问该载置台时的封锁区域的面积比搬运台车从第二方向访问该载置台时的封锁区域的面积小,在搬运台车从第一方向访问载置台的情况下,在俯视时当物品的移载时移载部未从行驶部露出,在搬运台车从第二方向访问载置台的情况下,在俯视时当物品的移载时移载部从行驶部露出。由此,在这样的结构的搬运系统中,能够使搬运台车的搬运效率提高。
13.在本发明的一个方面所涉及的搬运系统中,也可以是包含载置台的多个载置台沿着规定的并列设置方向并列设置,搬运台车从第一方向访问该载置台时的封锁区域的面积与搬运台车从第二方向访问该载置台时的封锁区域的面积相等,第一方向为与第二方向相比沿着规定的并列设置方向的方向。在该情况下,在搬运台车向载置台的访问中,能够提高载置台的并列设置方向的优先度。因此,例如能够顺畅地进行物品在并列设置的载置台间的移动。
14.在本发明所涉及的搬运系统中,也可以是在不存在规定的并列设置方向的情况下,搬运台车从第一方向访问载置台时的搬运台车到达能够在与该载置台之间移载物品的位置为止的到达时间比搬运台车从第二方向访问该载置台时的搬运台车到达能够在与该载置台之间移载物品的位置为止的到达时间短。在该情况下,在搬运台车向载置台的访问中,能够提高到达时间的优先度。
15.在本发明的一个方面所涉及的搬运系统中,也可以是搬运台车从第一方向访问该载置台时的封锁区域的面积与搬运台车从第二方向访问该载置台时的封锁区域的面积相等,搬运台车从第一方向访问该载置台时的搬运台车到达能够在与该载置台之间移载物品的位置为止的到达时间比搬运台车从第二方向访问该载置台时的搬运台车到达能够在与该载置台之间移载物品的位置为止的到达时间短。在该情况下,在搬运台车向载置台的访问中,能够提高到达时间的优先度。
16.在本发明的一个方面所涉及的搬运系统中,也可以是搬运台车从第一方向访问载置台时的搬运台车到达能够在与该载置台之间移载物品的位置为止的到达时间比搬运台车从第二方向访问该载置台时的搬运台车到达能够在与该载置台之间移载物品的位置为止的到达时间长。由此,搬运台车在移载物品时,即使到达时间较长但能够使封锁区域的面积较小而访问载置台。
17.在本发明的一个方面所涉及的搬运系统中,也可以是控制器对多个搬运台车中的、从第一方向访问载置台时的搬运台车到达能够在与该载置台之间移载物品的位置为止的到达时间最短的任一个搬运台车发送沿着路径行驶的指令。由此,能够使搬运效率提高。
18.本发明的一个方面所涉及的网格系统具备:沿着水平方向延伸并配置成格子状的导轨;能够沿着导轨行驶的多个搬运台车;以及控制多个搬运台车的控制器,其中,搬运台车具有:行驶部,其使该搬运台车行驶;和移载部,其在水平面内沿与该搬运台车的行驶方向垂直的方向相对于行驶部移动而在与载置台之间移载物品,控制器在通过搬运台车使物品在与载置台之间移载的移载时进行封锁控制,封锁控制禁止除该搬运台车以外的其他搬运台车进入在俯视时当物品的移载时该搬运台车所占有的区域且是以与导轨的方格对应的单元格为单位划分出的封锁区域,搬运台车在物品的移载时当使移载部移动时存在该移载部不在与行驶部占有的单元格邻接的其他单元格露出的访问方向亦即第一方向的情况下,实现从该第一方向朝载置台的访问。
19.在该网格系统中,当搬运台车移载物品时,能够抑制封锁区域的单元格数变多。因此,不易阻碍其他搬运台车的行驶。由此,能够使搬运台车的搬运效率提高。
20.根据本发明的一个方面,可以提供一种能够使搬运台车的搬运效率提高的搬运系统及网格系统。
附图说明
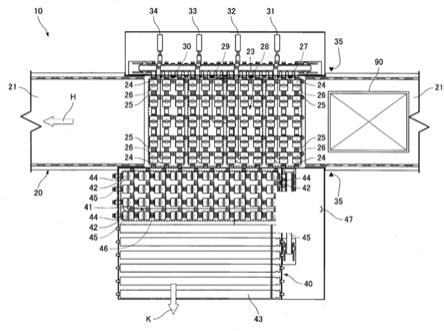
21.图1是表示第一实施方式所涉及的搬运系统的一个例子的立体图。
22.图2是表示搬运台车的一个例子的立体图。
23.图3是表示搬运台车的一个例子的侧视图。
24.图4是表示搬运系统的框图。
25.图5的(a)是表示封锁控制的封锁区域的例子的俯视图。图5的(b)是表示封锁控制的封锁区域的另一例子的俯视图。图5的(c)是表示封锁控制的封锁区域的又一例子的俯视图。
26.图6是表示在网格单元格中划分出的各区域的俯视图。
27.图7的(a)是表示访问方向为y方向时的封锁区域的例子的俯视图。图7的(b)是表示图7(a)的接续的俯视图。
28.图8是表示访问方向为x方向时的封锁区域的例子的俯视图。
29.图9是表示图8的接续的俯视图。
30.图10是表示映射的例子的图。
31.图11是表示装载端口的并列设置方向的例子的俯视图。
32.图12是用于说明搬运系统的动作例的俯视图。
33.图13是用于说明搬运系统的其他动作例的俯视图。
具体实施方式
34.以下,参照附图对实施方式进行说明。在附图中为了对实施方式进行说明,将一部分放大或者强调地记载等适当地变更比例尺来表现。在各图中,利用xyz坐标系对图中的方向进行说明。在xyz坐标系中,将与水平面平行的平面设为xy平面。将沿着xy平面的一个方向记为x方向,将与x方向正交的方向记为y方向。与xy平面垂直的方向记为z方向。对于各个x方向、y方向及z方向而言,以图中的箭头所指的方向为 方向,与箭头所指的方向相反的方向为-方向来进行说明。另外,将绕垂直轴或者绕z轴的回旋方向记为θz方向。
35.[第一实施方式]
[0036]
图1是表示一实施方式所涉及的搬运系统sys的一个例子的立体图。图2是在图1的搬运系统sys中使用的搬运台车v的立体图。图3是表示图2的搬运台车v的侧视图。图4是表示图1的搬运系统sys的框图。
[0037]
搬运系统sys例如为在半导体制造工厂的洁净室中,用于通过搬运台车v搬运物品m的网格系统。搬运系统sys具备第一搬运台车v1~第n搬运台车vn(以下,也有时总称为搬运台车v)(参照图4)、和控制多个搬运台车v的系统控制器5。在本实施方式中,对搬运台车v为顶棚搬运台车的例子进行说明。搬运台车v沿着搬运系统sys的导轨r移动。导轨r为搬运台车v的行驶路径。搬运台车v沿着搬运系统sys的导轨r移动,搬运收容半导体晶圆的foup、或者收容中间掩膜的中间掩膜pod等物品m。搬运台车v有时称为行驶车。
[0038]
导轨r被铺设在洁净室等建筑物的顶棚或者顶棚附近。导轨r例如与处理装置、储存装置(自动仓库)等邻接地设置。处理装置例如是曝光装置、涂布显影装置、制膜装置、蚀刻装置等,对搬运台车v所搬运的容器内的半导体晶圆实施各种处理。储存装置保管搬运台车v所搬运的物品m。导轨r为行驶路径的形态的一个例子。导轨r在俯视时配置成格子状。导轨r为沿着水平方向延伸且被悬吊的导轨。导轨r具有多个第一导轨r1、多个第二导轨r2、及多个交叉部r3。以下,将导轨r称为格子状导轨r。
[0039]
多个第一导轨r1分别沿着x方向延伸。多个第二导轨r2分别沿着y方向延伸。格子状导轨r通过多个第一导轨r1和多个第二导轨r2而在俯视时形成为格子状。格子状导轨r通过多个第一导轨r1和多个第二导轨r2而形成多个方格。交叉部r3配置于第一导轨r1与第二导轨r2交叉的部分。交叉部r3相对于第一导轨r1在x方向上相邻并且相对于第二导轨r2在y方向上相邻。交叉部r3为进行第一导轨r1与第二导轨r2的连接、第一导轨r1彼此的连接、第二导轨r2彼此的连接的连接轨道。交叉部r3为在搬运台车v沿着第一导轨r1行驶时、搬运台车v沿着第二导轨r2行驶时、以及搬运台车v从第一导轨r1向第二导轨r2或者从第二导轨r2向第一导轨r1行驶时的任何时候均使用的轨道。
[0040]
格子状导轨r通过在多个第一导轨r1与多个第二导轨r2正交的方向上设置,从而在俯视时成为多个网格单元格(单元格)2相邻的状态。一个网格单元格2相当于一个方格,在俯视时,为被沿y方向相邻的两个第一导轨r1与沿x方向相邻的两个第二导轨r2围起来的矩形区域。此外,在图1中,针对格子状导轨r的一部分示出,格子状导轨r通过同样的结构从图示的结构起在x方向及y方向上连续而形成。
[0041]
第一导轨r1、第二导轨r2及交叉部r3通过悬吊部件h(参照图1)悬吊于未图示的顶棚。悬吊部件h具有用于悬吊第一导轨r1的第一部分h1、用于悬吊第二导轨r2的第二部分h2以及用于悬吊交叉部r3的第三部分h3。第一部分h1和第二部分h2分别设置在隔着第三部分h3的两处。
[0042]
第一导轨r1、第二导轨r2及交叉部r3分别具有供搬运台车v的后述的行驶车轮21行驶的行驶面r1a、r2a、r3a。在第一导轨r1与交叉部r3之间、及第二导轨r2与交叉部r3之间分别形成间隙。第一导轨r1与交叉部r3之间、及第二导轨r2与交叉部r3之间的间隙在搬运台车v在第一导轨r1行驶而横切第二导轨r2时、或者在第二导轨r2行驶而横切第一导轨r1时,供搬运台车v的一部分亦即后述的连结部30通过的部分。因此,第一导轨r1与交叉部r3之间、及第二导轨r2与交叉部r3之间的间隙被设置为连结部30能够通过的宽度。第一导轨
r1、第二导轨r2及交叉部r3沿着同一水平面设置。在本实施方式中,对于第一导轨r1、第二导轨r2及交叉部r3而言,行驶面r1a、r2a、r3a配置在同一水平面上。
[0043]
第一导轨r1为单向通行的导轨。邻接的一对第一导轨r1中的能够行驶的行驶方向相互不同。在邻接的一对第一导轨r1中的一方,搬运台车v的行驶方向为x方向的一侧(-x方向或者 x方向中的任一方),在邻接的一对第一导轨r1中的另一方,为x方向的另一方向(-x方向或者 x方向中的另一方)。第二导轨r2为单向通行的导轨。邻接的一对第二导轨r2中的能够行驶的行驶方向相互不同。在邻接的一对第二导轨r2中的一方,搬运台车v的行驶方向为y方向的另一侧(-y方向或者 y方向中的任一方),在邻接的一对第一导轨r1中的另一方,为x方向的另一方向(-y方向或者 y方向中的另一方)。
[0044]
搬运系统sys具备通信系统(未图示)。通信系统被用于搬运台车v和系统控制器5的通信。搬运台车v和系统控制器5分别经由通信系统而可通信地连接。
[0045]
针对搬运台车v的结构进行说明。如图2~图4所示,搬运台车v设置为能够沿格子状导轨r行驶。搬运台车v具有主体部10、行驶部20、连结部30以及台车控制器50。
[0046]
主体部10配置在格子状导轨r的下方(-z方向侧)。主体部10在俯视时例如形成为矩形。主体部10形成为在俯视时收纳于格子状导轨r中的一个网格单元格2(参照图1)的尺寸。因此,确保了与在相邻的第一导轨r1或者第二导轨r2行驶的其他搬运台车v会让的空间。主体部10具备上部单元格17和移载装置(移载部)18。上部单元格17经由连结部30而被从行驶部20悬吊。上部单元格17例如在俯视时为矩形,在上表面17a具有四个角部。
[0047]
主体部10在四个角部分别具有行驶车轮21、连结部30、方向转换机构34。在该结构中,通过配置于主体部10的四个角部的行驶车轮21,能够稳定地悬吊主体部10,且能够使主体部10稳定地行驶。
[0048]
移载装置18相对于行驶部20沿水平方向移动而在与装载端口(载置台)p之间移载物品。移载装置18被设置在上部单元格17的下方。移载装置18能够绕z方向的旋转轴ax1旋转。移载装置18具有:在格子状导轨r的下侧保持物品m的物品保持部13;使物品保持部13沿铅垂方向升降的升降驱动部14;使升降驱动部14在水平方向上滑行移动的横向伸出机构11;以及保持横向伸出机构11的转动部12。装载端口p为搬运台车v的移载目的地或者移载源,且为在与搬运台车v之间进行物品m的交接的地点。
[0049]
物品保持部13通过把持物品m的凸缘部ma,从而将物品m悬吊来进行保持。物品保持部13例如为具有能够在水平方向上移动的爪部13a的卡盘,通过使爪部13a进入物品m的凸缘部ma的下方,并使物品保持部13上升,从而保持物品m。物品保持部13与金属线或者带等悬吊部件13b连接。
[0050]
升降驱动部14例如为升降机,通过送出悬吊部件13b从而使物品保持部13下降,通过卷绕悬吊部件13b从而使物品保持部13上升。升降驱动部14由台车控制器50控制,使物品保持部13以规定的速度下降或者上升。另外,升降驱动部14由台车控制器50控制,将物品保持部13保持为目标的高度。
[0051]
横向伸出机构11例如具有沿z方向重叠配置的多个可动板。在最下层的可动板安装有升降驱动部14。在横向伸出机构11中,可动板在水平面内沿与搬运台车v的行驶方向垂直的方向移动,安装于最下层的可动板的升降驱动部14及物品保持部13沿与搬运台车v的行驶方向垂直的方向横向伸出(滑行移动)。
[0052]
转动部12设置在横向伸出机构11与上部单元格17之间。转动部12具有转动部件12a和转动驱动部12b。转动部件12a设置为能够沿绕z方向的轴的方向转动。转动部件12a支承横向伸出机构11。转动驱动部12b例如使用电动马达等,使转动部件12a沿绕旋转轴ax1的轴的方向转动。转动部12通过来自转动驱动部12b的驱动力使转动部件12a转动,能够使横向伸出机构11(升降驱动部14和物品保持部13)沿绕旋转轴ax1的轴的方向旋转。搬运台车v通过使用移载装置18,能够相对于装载端口p进行物品m的交接。
[0053]
如图2和图3所示,也可以在搬运台车v设置有罩w。罩w包围移载装置18及保持于移载装置18的物品m。罩w为将下端敞开的筒状,且具有将横向伸出机构11的可动板突出的部分切除而得到的形状。罩w的上端安装于转动部12的转动部件12a,伴随着转动部件12a的转动而绕旋转轴ax1的轴转动。
[0054]
行驶部20具有行驶车轮21和辅助车轮22。行驶车轮21分别配置于上部单元格17(主体部10)的上表面17a的四个角部。行驶车轮21分别安装于设置于连结部30的车轴。行驶车轮21分别通过行驶驱动部33的驱动力进行旋转驱动。行驶车轮21分别在格子状导轨r上滚动。行驶车轮21分别在第一导轨r1、第二导轨r2及交叉部r3的行驶面r1a、r2a、r3a滚动,使搬运台车v行驶。此外,并不限于四个行驶车轮21全部通过行驶驱动部33的驱动力进行旋转驱动,也可以为针对四个行驶车轮21中的一部分进行旋转驱动的结构。
[0055]
行驶车轮21被设置为能够以回旋轴ax2为中心沿θz方向回旋。行驶车轮21通过后述的方向转换机构34沿θz方向回旋,其结果为,能够变更搬运台车v的行驶方向。辅助车轮22在行驶车轮21的行驶方向的前后分别配置各一个。辅助车轮22分别与行驶车轮21同样地,能够沿着xy平面绕平行或者几乎平行的车轴的轴旋转。辅助车轮22的下端设定为比行驶车轮21的下端高。因此,当行驶车轮21在行驶面r1a、r2a、r3a行驶时,辅助车轮22不与行驶面r1a、r2a、r3a接触。另外,当行驶车轮21通过第一导轨r1与交叉部r3之间、及第二导轨r2与交叉部r3之间的间隙时,辅助车轮22与行驶面r1a、r2a、r3a接触,而抑制行驶车轮21的落入。此外,并不限于在一个行驶车轮21设置两个辅助车轮22,例如,也可以在一个行驶车轮21设置一个辅助车轮22,还可以不设置辅助车轮22。
[0056]
如图2所示,连结部30将主体部10的上部单元格17与行驶部20连结。连结部30分别设置于上部单元格17(主体部10)的上表面17a的四个角部。通过该连结部30而使主体部10成为被从行驶部20悬吊的状态,并配置在比格子状导轨r靠下方。连结部30具有支承部件31和连接部件32。支承部件31将行驶车轮21的旋转轴和辅助车轮22的旋转轴支承为能够旋转。支承部件31保持行驶车轮21与辅助车轮22的相对位置。支承部件31例如形成为板状,并形成为能够通过第一导轨r1与交叉部r3之间、及第二导轨r2与交叉部r3之间的间隙的厚度。
[0057]
连接部件32从支承部件31向下方延伸并连结于上部单元格17的上表面17a,保持上部单元格17。连接部件32在内部具备将后述的行驶驱动部33的驱动力向行驶车轮21传递的传递机构。该传递机构可以为使用链或者带的结构,也可以为使用齿轮系的结构。连接部件32设置为能够以回旋轴ax2为中心沿θz方向回旋。通过该连接部件32以回旋轴ax2为中心回旋,从而能够经由支承部件31而使行驶车轮21沿绕回旋轴ax2的θz方向回旋。
[0058]
在连结部30(参照图2)设置有行驶驱动部33和方向转换机构34。行驶驱动部33安装于连接部件32。行驶驱动部33为驱动行驶车轮21的驱动源,例如使用电动马达等。四个行
驶车轮21为分别被行驶驱动部33驱动的驱动轮。四个行驶车轮21由台车控制器50控制为成为相同的转速。
[0059]
方向转换机构34通过使连结部30的连接部件32以回旋轴ax2为中心回旋,从而使行驶车轮21沿绕回旋轴ax2的θz方向回旋。通过使行驶车轮21沿θz方向回旋,从而能够从将搬运台车v的行驶方向设为x方向的第一状态切换为将行驶方向设为y方向的第二状态,或者从将行驶方向设为y方向的第二状态切换为将行驶方向设为x方向的第一状态。通过方向转换机构34的回旋,从而配置于上表面17a的四个角部的行驶车轮21和辅助车轮22分别以回旋轴ax2为中心沿θz方向在90度的范围内回旋。方向转换机构34的驱动由台车控制器50控制。通过使行驶车轮21和辅助车轮22回旋,从而行驶车轮21从与第一导轨r1和第二导轨r2的一方接触的状态转移为与另一方接触的状态。因此,能够在将搬运台车v的行驶方向设为x方向的第一状态、与将行驶方向设为y方向的第二状态进行切换。
[0060]
搬运台车v具备检测位置信息的位置检测部38(参照图4)。位置检测部38通过检测表示位置信息的位置标记(未图示),从而检测搬运台车v的当前位置。位置检测部38通过非接触检测位置标记。位置标记针对格子状导轨r的各网格单元格2的每一个进行设置。
[0061]
台车控制器50统一地控制搬运台车v。台车控制器50为由cpu(central processing unit)、rom(read only memory)及ram(random access memory)等构成的运算机。台车控制器50例如能够作为将储存在rom中的程序加载到ram上而由cpu执行的软件而构成。台车控制器50也可以构成为基于电子电路等的硬件。台车控制器50可以由一个装置构成,也可以由多个装置构成。在由多个装置构成的情况下,通过它们经由因特网或者内联网等通信网络连接,从而逻辑上构建一个台车控制器50。对于台车控制器50而言,在本实施方式中示出设置于主体部10的例子(参照图3),但也可以设置于主体部10的外部。
[0062]
台车控制器50基于搬运指令来控制搬运台车v的行驶。台车控制器50通过控制行驶驱动部33、方向转换机构34等,从而控制搬运台车v的行驶。台车控制器50例如控制行驶速度、与停止相关的动作、与方向转换相关的动作。台车控制器50控制搬运台车v的行驶,以使不进入其他搬运台车v的封锁区域(后述)。
[0063]
台车控制器50基于搬运指令来控制搬运台车v的移载动作。台车控制器50通过控制移载装置18等,从而控制搬运台车v的移载动作。台车控制器50控制把持配置于规定的装载端口p的物品m的抓取货物的动作、将保持的物品m向规定的装载端口p卸下的卸货的动作。台车控制器50周期性地生成并更新状态信息(未图示)。状态信息储存在存储部51中。台车控制器50将状态信息发送至系统控制器5。状态信息例如为搬运台车v的当前位置的信息、表示正常或者异常等搬运台车v的当前的状态的信息、与基于搬运指令等各种指令的搬运台车v的执行状态(执行中、执行完成、执行失败)相关的信息。台车控制器50在移载物品m时,将请求后述的封锁区域的占有许可的区域占有请求发送至系统控制器5。台车控制器50在物品m的移载完成后,将请求封锁区域的占有解除的区域解除请求发送至系统控制器5。
[0064]
系统控制器5为由cpu、rom及ram等构成的运算机。系统控制器5例如能够作为将储存在rom中的程序加载到ram上而由cpu执行的软件而构成。系统控制器5也可以构成为基于电子电路等的硬件。系统控制器5可以由一个装置构成,也可以由多个装置构成。在由多个装置构成的情况下,通过它们经由因特网或者内联网等通信网络连接,从而逻辑上构建一个系统控制器5。
[0065]
系统控制器5选择能够搬运物品m的多个搬运台车v中的任一个,将搬运指令分配给选择出的搬运台车v。搬运指令包含使搬运台车v执行至装载端口p为止的行驶的行驶指令、和配置于装载端口p的物品m的抓取指令或者保持的物品m向装载端口p的卸货指令。
[0066]
系统控制器5在通过搬运台车v使物品m在与装载端口p之间移载的移载时,进行禁止除该搬运台车v以外的其他搬运台车v进入封锁区域的排他控制亦即封锁控制。由此,其他搬运台车v被控制行驶,以使得不进入未给予占有许可的封锁区域,例如在该封锁区域的近前待机。系统控制器5例如根据来自台车控制器50的区域占有许可请求,来开始封锁控制,对搬运台车v给予该封锁区域的占有许可。系统控制器5例如根据来自台车控制器50的区域解除请求,来解除封锁控制(该封锁区域的占有)。
[0067]
针对封锁区域详细说明。如图5所示,封锁区域3与在俯视时在物品m的移载时该搬运台车v所占有的区域对应。封锁区域3以与格子状导轨r的方格对应的网格单元格2为单位被划分。封锁区域3的面积的大小与划分封锁区域3的网格单元格2的数量的大小对应。封锁区域3的面积为俯视时的封锁区域3的面积。在本实施方式的封锁控制中,在结构上,能够存在三种图案的封锁区域3。
[0068]
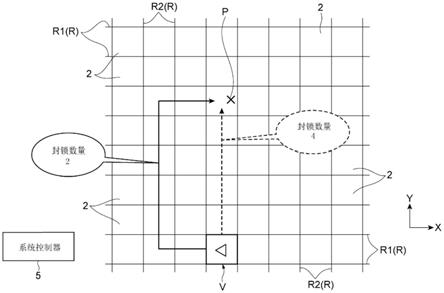
例如,在图5的(a)所示的例子中,将y方向作为行驶方向的搬运台车v在移载时,移载装置18在俯视时从行驶部20朝x方向露出,移载装置18进入与行驶部20的网格单元格2邻接的网格单元格2。在这种情况下,封锁区域3由在俯视时包围行驶部20和移载装置18的四个网格单元格2构成。封锁区域3的封锁数量(与面积相关的信息)以网格单元格2为单位成为“4”。此外,在搬运台车v上图示的三角形的朝向表示搬运台车v的行驶方向(下图相同)。
[0069]
例如,在图5的(b)所示的例子中,将y方向作为行驶方向的搬运台车v在移载时,行驶部20在俯视时横跨沿y方向邻接的两个网格单元格2。在移载时,在俯视时移载装置18未从行驶部20露出。在这种情况下,封锁区域3在俯视时由这两个网格单元格2构成。封锁区域3的封锁数量以网格单元格2为单位成为“2”。
[0070]
例如,在图5的(c)所示的例子中,将y方向作为行驶方向的搬运台车v在移载时,行驶部20在俯视时位于一个网格单元格2。在移载时,移载装置18在俯视时未从行驶部20露出。在这种情况下,封锁区域3在俯视时由这一个网格单元格2构成。封锁区域3的封锁数量以网格单元格2为单位成为“1”。
[0071]
这样的封锁区域3的封锁数量根据装载端口p的中心(以下,简称为“装载端口p”)的位置与向该装载端口p的访问方向的关系发生变化。向装载端口p的访问方向(以下,简称为“访问方向”)为在向装载端口p移载时,向该装载端口p所在的网格单元格2访问(进入)时的搬运台车v的行驶方向。访问方向在格子状导轨r中为x方向及y方向中的任一方。
[0072]
针对访问方向与封锁区域3的关系进行详细说明。如图6所示,关于装载端口p(参照图7等)所在的位置,一个网格单元格2在俯视时被划分为四个区域a、区域b、区域c及区域d。
[0073]
区域a为网格单元格2中的中央的矩形区域。装载端口p存在于区域a的概率比装载端口p存在于区域b~d的概率低,例如为16%。装载端口p存在于某个区域的概率与该区域的面积成比例。在装载端口p存在于区域a的情况下,访问方向为y方向时的封锁区域3的封锁数量为“2”。在装载端口p存在于区域a的情况下,访问方向为x方向时的封锁区域3的封锁数与访问方向为y方向时的封锁数量相等,为“2”。
[0074]
区域b为在网格单元格2中相对于区域a在y方向的一侧及另一侧邻接的矩形区域。装载端口p存在于区域b的概率比装载端口p存在于区域d的概率低,与装载端口p存在于区域c的概率相等,比装载端口p存在于区域a的概率高,例如为24%。在装载端口p存在于区域b的情况下,访问方向为y方向时的封锁区域3的封锁数量为“2”。在装载端口p存在于区域b的情况下,访问方向为x方向时的封锁区域3的封锁数量比访问方向为y方向时的封锁数量多,为“4”。
[0075]
区域c为在网格单元格2中相对于区域a在x方向的一侧及另一侧邻接的矩形区域。装载端口p存在于区域c的概率比装载端口p存在于区域d的概率低,与装载端口p存在于区域b的概率相等,比装载端口p存在于区域a的概率高,例如为24%。在装载端口p存在于区域c的情况下,访问方向为y方向时的封锁区域3的封锁数量为“4”。在装载端口p存在于区域c的情况下,访问方向为x方向时的封锁区域3的封锁数量比访问方向为y方向时的封锁数量少,为“2”。
[0076]
区域d为在网格单元格2中相对于区域c在y方向的一侧及另一侧(相对于区域b在x方向的一侧及另一侧)邻接的区域。装载端口p存在于区域d的概率比装载端口p存在于区域a、区域b及区域c的概率高,例如为36%。在装载端口p存在于区域d的情况下,访问方向为y方向时的封锁区域3的封锁数量为“4”。在装载端口p存在于区域d的情况下,访问方向为x方向时的封锁区域3的封锁数量为“4”。
[0077]
此外,区域a~d的形状及尺寸取决于物品m的尺寸、搬运台车v的尺寸,网格单元格2的尺寸(方格尺寸)、封锁区域3的尺寸、横向伸出机构11的尺寸、以及移载装置18的尺寸中的至少任一个。本实施方式中的区域a~d的形状及尺寸为一个例子,并不限于此。
[0078]
例如,如图7的(a)所示,在装载端口p存在于区域b的情况下,在访问方向为y方向时,搬运台车v的行驶部20横跨沿y方向邻接的两个网格单元格2。此时,搬运台车v占有包含这两个网格单元格2的区域4。如图7的(b)所示,在移载时,移载装置18在x方向上移动,但移载装置18在俯视时未从行驶部20露出。由此,搬运台车v继续占有包含这两个网格单元格2的区域4。即,在装载端口p存在于区域b的情况下,访问方向为y方向时的封锁区域3的封锁数量为“2”。
[0079]
另一方面,例如,如图8所示,在装载端口p存在于区域b的情况下,在访问方向为x方向时,搬运台车v的行驶部20横跨沿x方向邻接的两个网格单元格2。此时,搬运台车v占有包含这两个网格单元格2的区域4。如图9所示,在移载时,移载装置18沿x方向移动,移载装置18在俯视时从行驶部20朝y方向露出,移载装置18进入沿y方向邻接的网格单元格2。由此,搬运台车v占有包含这两个网格单元格2、和与这两个网格单元格2在y方向上邻接的另外两个网格单元格2的区域4。即,在装载端口p存在于区域b的情况下,访问方向为x方向时的封锁区域3的封锁数量为“4”。此外,图9的右上的网格单元格2未被搬运台车v物理占有,但与被搬运台车v物理占有的两个网格单元格2邻接。因此,考虑台车行驶的安全性而使右上的网格单元格2包含在封锁区域3中。
[0080]
返回图4,在系统控制器5存储有将多个装载端口p、针对访问装载端口p的多个访问方向的每一个确定且与封锁区域3的面积相关的信息、以及装载端口p的并列设置方向相互建立了关联的映射。例如,如图10所示,存储在系统控制器5中的映射mp通过针对多个装载端口p的“端口编号”的每一个,设定“访问方向为y方向的情况下的封锁控制的封锁数
量”、“访问方向为x方向的情况下的封锁控制的封锁数量”、及“装载端口p的并列设置方向”而成。
[0081]
端口编号为针对多个装载端口p的每一个设定的识别用的编号。封锁数量基于上述的访问方向与封锁区域3的关系,被预先求出而被设定。装载端口p的并列设置方向(规定的并列设置方向)例如为以小于一定距离的间隔排列的多个装载端口p的排列方向。例如,如图11所示,对于以小于一定距离的间隔沿y方向排列的多个装载端口p,并列设置方向为y方向。例如,针对相互分离了一定距离以上的装载端口p,为没有并列设置方向。例如,针对在既不是x方向也不是y方向的方向上并列设置的装载端口p,为没有并列设置方向。此外,在映射mp中,也可以除封锁数量以外,还包含构成该封锁区域3的网格单元格2的编号(识别符)。
[0082]
系统控制器5在通过搬运台车v使物品m在与装载端口p之间移载的情况下,使用映射mp,来决定搬运台车v访问装载端口p时的访问方向。具体而言,系统控制器5在通过搬运台车v使物品m在与装载端口p之间移载的情况下,使用映射mp,来将封锁区域3的封锁数量(封锁区域3的面积)最小的访问方向决定为第一方向。
[0083]
此时,在映射mp中,在存在多个封锁数量最小的访问方向的情况下,将这些访问方向中的最沿着装载端口p的并列设置方向的任一个方向决定为第一方向。或者,在存在多个封锁数量最小的访问方向且没有装载端口p的并列设置方向的情况下,将封锁数量最小的访问方向中的、搬运台车v到达能够在与装载端口p之间移载物品m的位置为止的到达时间最短的任一个方向决定为第一方向。以下,将能够在与装载端口p之间移载物品m的位置称为“移载位置”,将搬运台车v到达移载位置为止所耗费的到达时间也简称为“到达时间”。仅访问装载端口p的路径活跃的(也就是说,未由于单元格下降等成为无法通行)访问方向为在系统控制器5中决定第一方向时的选项。
[0084]
例如,系统控制器5基于搬运指令获取要访问的装载端口p的端口编号。系统控制器5参照映射mp,从映射mp获取访问方向分别为x方向及y方向时的已取得的端口编号所涉及的封锁数量。另外,系统控制器5参照映射mp,获取已取得的端口编号所涉及的装载端口p的并列设置方向。系统控制器5将x方向和y方向中的封锁数量较小的一方决定为第一方向,在x方向和y方向的封锁数量相同的情况下,将x方向和y方向中的与装载端口p的并列设置方向一致的一方决定为第一方向,在x方向和y方向的封锁数量相同且没有装载端口p的并列设置方向的情况下,将x方向和y方向中的到达时间最短的任一方决定为第一方向。
[0085]
进而,系统控制器5根据决定出的第一方向生成访问装载端口p的路径,并使搬运台车v沿着该路径行驶。其结果为,搬运台车v沿着从第一方向访问该装载端口p的路径行驶。路径例如能够由预定通过的多个网格单元格2表示。路径生成为不进入未给予搬运台车v的占有许可的封锁区域3(其他搬运台车v的封锁区域3)。
[0086]
这里,搬运台车v从第一方向访问该装载端口p时的封锁数量(面积)比搬运台车v从第二方向访问该装载端口p时的封锁数量小、或者与搬运台车v从第二方向访问该装载端口p时的封锁数量相等。第一方向为与第二方向垂直的方向。第一方向为x方向及y方向中的任一方,第二方向为x方向及y方向中的另一方。
[0087]
另外,在将第一方向作为访问方向时的封锁数量与将第二方向作为访问方向时的封锁数量相等的情况下,第一方向为与第二方向相比沿着装载端口p的并列设置方向的方
向。在将第一方向作为访问方向时的封锁数量与将第二方向作为访问方向时的封锁数量相等且在装载端口p不存在并列设置方向的情况下,搬运台车v从第一方向访问装载端口p时的到达时间比搬运台车v从第二方向访问装载端口p时的到达时间短。
[0088]
另外,在将第一方向作为访问方向时的封锁数量比将第二方向作为访问方向时的封锁数量小的情况下,在访问方向为第一方向的情况下,在俯视时,移载装置18在移载时未从行驶部20露出。在将第一方向作为访问方向时的封锁数量比将第二方向作为访问方向时的封锁数量小的情况下,在访问方向为第二方向的情况下,在俯视时,移载装置18在移载时从行驶部20露出。
[0089]
另外,搬运台车v通过如上述那样使访问方向为第一方向,从而在物品m的移载时当使移载装置18移动时,实现从该移载装置18不在与行驶部20占有的网格单元格2邻接的其他网格单元格2露出的访问方向朝装载端口p的访问(参照图7的(b))。换言之,搬运台车v在物品m的移载时存在移载装置18不在其他网格单元格2露出的访问方向亦即第一方向的情况下,实现从该第一方向朝装载端口p的访问。此外,也可以由台车控制器50执行上述的系统控制器5的各种控制的至少一部分。
[0090]
接下来,在搬运系统sys中,对在通过搬运台车v移载物品m时访问装载端口p的情况的例子进行说明。
[0091]
图12是用于说明搬运系统sys的动作例的俯视图。如图12所示,系统控制器5使用映射mp,来根据要访问的装载端口p的端口编号,获取访问方向为x方向时的封锁数量与访问方向为y方向时的封锁数量。访问方向为x方向时封锁数量为2,访问方向为y方向时封锁数量为4。由此,系统控制器5将x方向决定为第一方向,将包含以从第一方向访问装载端口p的路径行驶的行驶指令的搬运指令分配给搬运台车v。
[0092]
其结果为,被分配了搬运指令的搬运台车v沿着从第一方向访问装载端口p的该路径朝向装载端口p行驶。此外,在图12所示的例子中,搬运台车v从第一方向访问装载端口p时的到达时间比搬运台车v从第二方向访问装载端口p时的到达时间长。
[0093]
以上,在搬运系统sys中,搬运台车v在将物品m在与装载端口p之间移载的情况下,从第一方向访问该装载端口p。搬运台车v从第一方向访问时的封锁区域3的面积为从第二方向访问该装载端口p时的封锁区域3的面积以下。由此,搬运台车v在移载物品m时,能够不使封锁区域3的面积变大而访问装载端口p。在搬运台车v移载物品m时,能够抑制封锁区域3的面积变大。因此,不易阻碍其他搬运台车v的行驶。因此,能够使搬运台车v的搬运效率提高。
[0094]
在搬运系统sys中,搬运台车v设置为能够沿着在俯视时配置成格子状的格子状导轨r行驶。第一方向为与第二方向垂直的方向,封锁区域3以与格子状导轨r的方格对应的网格单元格2为单位进行划分。封锁区域3的面积的大小与划分封锁区域3的网格单元格2的数量的大小对应。在该情况下,在搬运台车v沿着在俯视时配置成格子状的格子状导轨r行驶的系统中,能够使搬运台车v的搬运效率提高。
[0095]
搬运系统sys作为行驶路径具备沿着水平方向延伸且被悬吊的格子状导轨r。行驶部20具有在格子状导轨r上滚动的行驶车轮21。移载装置18具有在格子状导轨r的下侧保持物品m的物品保持部13。在该情况下,在所谓的网格系统中,能够使搬运台车v的搬运效率提高。
[0096]
在搬运系统sys中,在系统控制器5存储有映射mp,系统控制器5使用映射mp,来将封锁区域3的面积最小的访问方向决定为第一方向。由此,能够高效地将移载物品m时的封锁区域3的面积最小化。
[0097]
在搬运系统sys中,搬运台车v的移载装置18在水平面内沿与搬运台车v的行驶方向垂直的方向相对于行驶部20移动。在搬运台车v从第一方向访问该装载端口p时的封锁区域3的面积比搬运台车v从第二方向访问该装载端口p时的封锁区域3的面积小的情况下,可以说以下的情况。即,在搬运台车v从第一方向访问装载端口p的情况下,在俯视时移载装置18部在物品m的移载时未从行驶部20露出。另外,在搬运台车v从第二方向访问装载端口p的情况下,在俯视时移载装置18在物品m的移载时从行驶部20露出。由此,在这样的结构的搬运系统sys中,能够使搬运台车v的搬运效率提高。
[0098]
在搬运系统sys中,在搬运台车v从第一方向访问该装载端口p时的封锁数量与搬运台车v从第二方向访问该装载端口p时的封锁数量相等的情况下,第一方向为与第二方向相比沿着装载端口p的并列设置方向的方向。由此,在搬运台车v移载物品m时的向装载端口p的访问中,能够提高装载端口p的并列设置方向的优先度。即,在决定访问装载端口p的访问方向时,能够以封锁数量的最小化为最优先,其次使装载端口p的排列优先。因此,例如能够顺畅地进行被并列设置的装载端口p间的物品m的移动,从而能够使搬运台车v的搬运效率提高。
[0099]
在搬运系统sys中,在不存在装载端口p的并列设置方向的情况下,搬运台车v从第一方向访问该装载端口p时的到达时间比搬运台车v从第二方向访问该装载端口时的到达时间短。由此,在搬运台车v移载物品m时的向装载端口p的访问中,能够提高向移载位置的到达时间的优先度。也就是说,在决定访问装载端口p的访问方向时,能够以封锁数量的最小化为最优先,其次使装载端口p的排列优先,再次使向移载位置的到达时间优先。能够使搬运台车v的搬运效率提高。
[0100]
在搬运系统sys中,存在搬运台车v从第一方向访问装载端口p时的到达时间比搬运台车v从第二方向访问装载端口p时的到达时间长的情况。在这种情况下,搬运台车v在移载物品m时,能够使得即使到达时间较长但封锁区域3的面积较小,来访问装载端口p。
[0101]
搬运系统sys为网格系统。在作为网格系统的搬运系统sys中,在搬运台车v移载物品m时,能够抑制封锁数量变大。不易阻碍其他搬运台车v的行驶,能够使搬运台车v的搬运效率提高。
[0102]
图13是用于说明搬运系统sys的其他动作例的俯视图。在图13所示的例子中,示出在装载端口p的周边存在多个搬运台车v(第一搬运台车v1和第二搬运台车v2)的情况的动作例。
[0103]
如图13所示,系统控制器5使用映射mp,来根据要访问的装载端口p的端口编号,获取访问方向为x方向时的封锁数量与访问方向为y方向时的封锁数量。访问方向为x方向时封锁数量为4,访问方向为y方向时封锁数量为2。由此,系统控制器5将y方向决定为第一方向。
[0104]
这里,第一搬运台车v1从第一方向访问装载端口p时的到达时间比第二搬运台车v2从第一方向访问装载端口p的到达时间小。由此,系统控制器5将包含以从第一方向访问装载端口p的路径行驶的行驶指令的搬运指令分配给第一搬运台车v1。其结果为,被分配了
搬运指令的第一搬运台车v1沿着从第一方向访问装载端口p的该路径朝向装载端口p行驶。
[0105]
像这样,在搬运系统sys中,系统控制器5对多个搬运台车v中的、在从第一方向访问装载端口p的情况下到达时间最短的任一个搬运台车v发送指令。由此,能够提高搬运台车v的搬运效率。
[0106]
关于以上进行了说明的搬运系统sys进行模拟,验证了搬运台车v的搬运效率。在模拟中,在决定访问装载端口p的访问方向时,将与以封锁数量的最小化为最优先的搬运系统sys对应的模型作为实施例,将以向移载位置的到达时间的最短化为最优先的模型作为比较例1,将使访问方向随机的模型作为比较例2。在模拟中,将搬运台车v的台数设为120台~200台。模拟的结果为,在搬运达成率、搬运时间(平均值及方差)以及台车运转率全部中,实施例为最优的结果,确认了使搬运台车v的搬运效率提高这一搬运系统sys的上述效果。
[0107]
以上,针对实施方式进行了说明,但本发明的一个方式并不限于上述实施方式,在不脱离发明的主旨的范围内能够进行各种变更。
[0108]
在上述实施方式的搬运系统sys中,系统控制器5也可以在决定了由搬运台车v访问的装载端口p之后,针对访问装载端口p的多个访问方向的每一个运算封锁数量(与封锁区域3的面积相关的信息),并基于运算结果来将封锁数量最小的访问方向决定为第一方向。在该情况下,由于搬运台车v每次访问装载端口p时都运算封锁数量而决定第一方向,因此即使产生搬运台车v的行驶环境等由于某些原因从最初临时发生了变化那样的状况,也能够根据该状况可靠地将移载物品m时的封锁区域3的面积最小化。
[0109]
在上述实施方式中,在搬运台车v从第一方向访问该装载端口p时的封锁数量与搬运台车v从第二方向访问该装载端口p时的封锁数量相等的情况下,也可以与装载端口p的并列设置方向无关,而如以下那样构成。即,搬运台车v从第一方向访问装载端口p时的到达时间可以比搬运台车v从第二方向访问装载端口p时的到达时间短。在该情况下,例如系统控制器5将封锁数量最小的多个访问方向中的到达时间最短的任一个决定为第一方向。由此,在搬运台车v移载物品m时的向装载端口p的访问中,能够提高向移载位置的到达时间的优先度。换言之,在决定向装载端口p的访问方向时,能够以封锁数量的最小化为最优先,其次使向移载位置的到达时间优先。
[0110]
在上述实施方式中,作为搬运系统sys采用了网格系统,但搬运系统sys并不限于网格系统。例如作为搬运系统,也可以采用agv(automated guided vehicle:自动引导小车),还可以采用在格子状的行驶路径行驶的各种已知的系统。在上述实施方式中,搬运台车v在格子状导轨r的下侧保持物品m,但也可以将主体部10配置在格子状导轨r的上方,在格子状导轨r的上侧保持物品m。
[0111]
在上述实施方式中,作为封锁区域3的面积使用封锁数量,但并不限于封锁数量,也可以直接使用封锁区域3的面积,还可以使用与封锁区域3的面积相关的其他参数。上述实施方式的“相等”允许在从设计到制造上等的误差。
[0112]
附图标记说明
[0113]2…
网格单元格(单元格)、3
…
封锁区域、5
…
系统控制器(控制器)、13
…
物品保持部、18
…
移载装置(移载部)、20
…
行驶部、21
…
行驶车轮、m
…
物品、mp
…
映射、p
…
装载端口(载置台)、r
…
格子状导轨(行驶路径)、sys
…
搬运系统(网格系统)、v、v1、v2、vn
…
搬运台车。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。