1.本发明属于激光焊接技术领域,具体涉及一种箱体焊接方法及存储介质。
背景技术:
2.目前对于箱体(如服务器柜)的焊接,通常采用tig焊(tungsten inert gas welding)的方式。这种方式在焊后还需要对箱体进行人工打磨,不仅自动化程度低,劳动强度大,工序繁琐,处理时间长,而且产品形变量大,从而导致生产效率低下,产品质量差。
技术实现要素:
3.针对现有技术存在的缺陷,本发明旨在提供一种箱体焊接方法及存储介质,以提高生产效率,提升产品质量,降低劳动强度。
4.为解决上述技术问题,实现上述技术效果,本发明通过以下技术方案实现:
5.一种箱体焊接方法,包括以下步骤:
6.s100、在夹具变位机的配合下,工作人员将待焊接箱体的侧板和端板分别放置到箱体夹具的对应位置并夹紧固定;随后箱体夹具将两侧端板同时向侧板的左右两端推进到位,完成端板与侧板预拼接,并在焊接位置留出相应焊缝;
7.s200、在夹具变位机的配合下,箱体拼接检测相机对左右两侧的拼接处进行拍照检测,以此确认箱体的几块侧板能否对齐;
8.s300、在地轨机器人以及夹具变位机的配合下,激光填丝焊接机构依次对箱体左右两端前后两侧上的每一条焊缝先进行焊缝寻位,再进行焊接;其中,焊缝寻位由激光填丝焊接机构上的焊缝寻位组件完成,焊接由激光填丝焊接机构上的激光焊接组件、送丝组件、吹保护气组件配合完成;焊接后地轨机器人带动激光填丝焊接机构回位;
9.s400、箱体夹具松开焊接好的箱体,并留出便于箱体吊装的避让空间,最后工作人员将焊接好的箱体从箱体夹具上吊装转运,完成下料。
10.进一步的,步骤s100的具体过程如下:
11.s101、左右两个端板夹持平移机构上的三角支架平移气缸驱动各自对应的三角支架向外平移,从而使得左右两个端板夹持侧支架向左右两侧打开,同时,侧板平移机构的侧板平移驱动组件中的两组平移板推拉气缸驱动各自对应的两块平移板向外平移,从而使得两个侧板夹持机构向前后两侧打开,在打开过程中,侧板平移机构的侧板平移稳定组件中的两组前后对置的侧板平移稳定前推气缸和侧板平移稳定后推气缸分别与两组平移板推拉气缸同步工作,平稳推动各自对应的侧板夹持机构的侧板夹持机构框架,从而保证两个侧板夹持机构在打开时上下保持稳定;
12.s102、工作人员通过吊具将一块端板放置到对应的一个端板夹持平移机构上,当该端板夹持平移机构上的端板接近开关感应到端板到位后,端板夹持平移机构上的端板顶部夹持组件、端板底部夹持组件和端板侧部夹持组件分别对端板进行定位、夹紧,然后以同样的方法将另一块端板在另一个端板夹持平移机构上定位、夹紧;
13.s103、工作人员继续通吊具将前侧面的侧板放置到前侧的侧板夹持机构上,当侧板夹持机构上的侧板接近开关感应到侧板到位后,侧板夹持机构上的若干组侧板夹持组件同时对侧板进行定位、夹紧;然后夹具变位机带动箱体夹具向前后向后翻转180度,并以同样的方法将后侧面的侧板放置到后侧的侧板夹持机构上定位、夹紧;
14.s104、左右两个端板夹持平移机构上的三角支架平移气缸驱动各自对应的三角支架向内平移,从而使得左右两个端板夹持侧支架由左右两侧向中央推进到位,到位后,左右两侧的端板在各自对应的端板夹持平移机构的夹持下分别与位于侧板夹持机构上的侧板完成预拼接,并在焊接位置留出相应焊缝;
15.s105、夹具变位机带动箱体夹具翻转180度复位。
16.进一步的,步骤s200的具体过程如下:
17.箱体夹具前侧的左右两端分别设置有一个箱体拼接检测相机,且两个箱体拼接检测相机分别通过对应的箱体拼接检测相机机械手安装在同侧的夹具变位机上;
18.当检查箱体侧板是否对齐时,左右两侧的箱体拼接检测相机在各自对应的箱体拼接检测相机机械手的带动下,先分别对箱体前表面的拼接处进行拍照检测,随后左右两个夹具变位机同时带动箱体夹具翻转180度,左右两侧的箱体拼接检测相机在各自对应的箱体拼接检测相机机械手的带动下,继续分别对箱体后侧面的拼接处进行拍照检测;
19.最后夹具变位机带动箱体夹具翻转180度复位。
20.进一步的,步骤s300的具体过程如下:
21.s301、地轨机器人的地轨组件带动激光填丝焊接机构移动至箱体夹具后侧的左端,然后地轨机器人的机械手组件带动激光填丝焊接机构上的焊缝寻位组件先对箱体后侧面左端的焊缝进行寻位确认,接着地轨机器人的机械手组件带动激光填丝焊接机构上的激光焊接组件、送丝组件、吹保护气组件配合工作,对箱体后侧左端的焊缝进行激光焊接或激光填丝焊接;
22.s302、地轨机器人的地轨组件带动激光填丝焊接机构移动至箱体夹具后侧的右端,然后地轨机器人的机械手组件带动激光填丝焊接机构上的焊缝寻位组件先对箱体后侧面右端的焊缝进行寻位确认,接着地轨机器人的机械手组件带动激光填丝焊接机构上的激光焊接组件、送丝组件、吹保护气组件配合工作,对箱体后侧右端的焊缝进行激光焊接或激光填丝焊接;
23.s303、夹具变位机带动箱体夹具翻转180度,随后地轨机器人的地轨组件带动激光填丝焊接机构移动至箱体夹具前侧面的左端,然后地轨机器人的机械手组件带动激光填丝焊接机构上的焊缝寻位组件先对箱体前侧面左端的焊缝进行寻位确认,接着地轨机器人的机械手组件带动激光填丝焊接机构上的激光焊接组件、送丝组件、吹保护气组件配合工作,对箱体前侧面左端的焊缝进行激光焊接或激光填丝焊接;
24.s304、夹具变位机带动箱体夹具翻转180度,随后地轨机器人的地轨组件带动激光填丝焊接机构移动至箱体夹具前侧面的右端,然后地轨机器人的机械手组件带动激光填丝焊接机构上的焊缝寻位组件先对箱体前侧面右端的焊缝进行寻位确认,接着地轨机器人的机械手组件带动激光填丝焊接机构上的激光焊接组件、送丝组件、吹保护气组件配合工作,对箱体前侧面右端的焊缝进行激光焊接或激光填丝焊接;
25.s305、夹具变位机带动箱体夹具翻转180度复位,最后地轨机器人的地轨组件带动
激光填丝焊接机构复位。
26.进一步的,所述焊缝寻位组件为一个焊缝寻位相机,所述焊缝寻位相机通过对应的支架安装在激光填丝焊接机构的激光焊接头的一侧,且所述焊缝寻位相机对准所述激光焊接头的焦点位置,在焊缝寻位时,只需要将激光焊接头对准焊缝位置,便可使得所述焊缝寻位相机对焊缝进行拍照确认。
27.进一步的,在焊接时,若遇到间隙较小的焊缝,则激光填丝焊接机构上的激光焊接组件直接对焊缝进行激光焊接,若遇到间隙较大的焊缝,则激光填丝焊接机构上的送丝组件会在激光焊接时进行送丝,并且激光填丝焊接机构上吹保护气组件同时会吹保护气,从而对焊缝进行激光填丝焊接。
28.进一步的,送丝组件会根据设定的程序,靠近或远离激光焊接组件,具体方法如下:
29.当激光焊接组件的激光焊接头移动至较小的焊缝时,送丝组件的摆动气缸通过第一摆杆、第二摆杆和送丝管固定支架安装板将送丝管向外摆动,从而使得送丝组件的送丝嘴远离激光焊接组件的激光焊接头,此时对焊缝只进行激光焊接;激光焊接组件的激光焊接头移动至较大的焊缝时,送丝组件的摆动气缸通过第一摆杆、第二摆杆和送丝管固定支架安装板将送丝管向内摆动,从而使得送丝组件的送丝嘴靠近激光焊接头,此时送丝嘴和保护气吹嘴均对准焊缝,在激光焊接的同时进行送丝和出保护气体,进而实现填丝激光焊接。
30.进一步的,步骤s400的具体过程如下:
31.s401、端板夹持平移机构上的端板顶部夹持组件、端板底部夹持组件和端板侧部夹持组件松开端板,侧板夹持机构上各层的侧板夹持位的侧板夹持组件松开侧板;
32.s402、左右两侧的端板夹持平移机构上的三角支架平移气缸驱动各自对应的三角支架向外平移,从而使得左右两个端板夹持侧支架向左右两侧打开;
33.s403、侧板平移机构的侧板平移驱动组件中的两组平移板推拉气缸驱动各自对应的两块平移板向内平移,从而使得两个侧板夹持机构由前后两侧向内合拢;在合拢过程中,侧板平移机构的侧板平移稳定组件中的两组前后对置的侧板平移稳定前推气缸和侧板平移稳定后推气缸分别与两组平移板推拉气缸同步工作,平稳推动各自对应的侧板夹持机构的侧板夹持机构框架,从而保证两个侧板夹持机构在合拢时上下保持稳定;
34.s404、此时所有夹持机构均完成退让工作,焊接后的箱体全部支撑在底梁上的四个箱体托举垫块上,最后,工作人员通过吊具将焊接好的箱体从箱体夹具上吊装运走即可。
35.进一步的,所述箱体夹具、所述夹具变位机和所述箱体拼接检测相机可以设置成并排的两组,从而形成双工位,而所述地轨机器人和所述激光填丝焊接机构设置一组,轮流在双工位之间交替工作,从而提高焊接效率。
36.一种计算机存储介质,所述计算机存储介质中存储有至少一个可执行指令,所述可执行指令使处理器执行上述任意一项所述的箱体焊接方法对应的操作。
37.与现有技术相比,本发明的有益效果为:
38.1、本发明可以对箱体进行精确地激光填丝焊接,且焊接处平整度较高,因此箱体的板材可以在焊接前先进行喷涂工序,只需在边缘处留出焊接位置,等全部焊接完之后,再对焊接处进行补喷即可,这就使得焊接后的箱体无须再进行打磨,也避免了产品因打磨而
造成的形变,不仅减少了加工工序,同时保证了产品的质量。
39.2、本发明通过地轨机器人以及夹具变位机能轻松完成辅助上板、箱体翻转、自动拼接、拼接对齐检测、焊缝寻位等功序,自动化程度高,加工时间短,不仅大大提高了焊接效率,并且减少了劳动强度。
40.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
附图说明
41.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
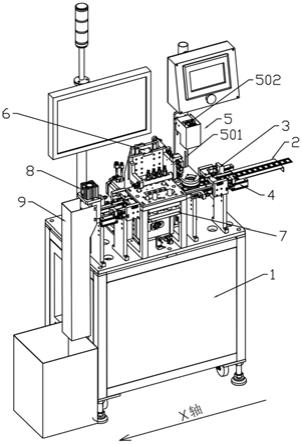
42.图1为本发明所采用的箱体焊接设备的整体结构立体图;
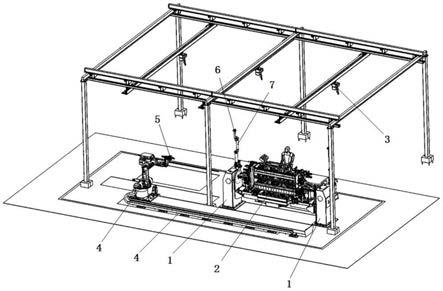
43.图2为本发明所采用的箱体焊接设备的夹具变位机、箱体夹具、地轨机器人、激光填丝焊接机构等的立体图;
44.图3为本发明所采用的箱体焊接设备的地轨机器人、激光填丝焊接机构的放大立体图;
45.图4为本发明所采用的箱体焊接设备的箱体夹具的立体图;
46.图5为本发明所采用的箱体焊接设备的箱体夹具的端板夹持平移机构的内侧面立体图;
47.图6为为本发明所采用的箱体焊接设备的箱体夹具的端板夹持平移机构的外侧面立体图;
48.图7为本发明所采用的箱体焊接设备的箱体夹具的侧板夹持机构的立体图;
49.图8为本发明所采用的箱体焊接设备的箱体夹具的侧板平移机构的顶部结构立体图;
50.图9为本发明所采用的箱体焊接设备的箱体夹具的侧板平移机构的底部结构立体图;
51.图10为本发明所采用的箱体焊接设备的箱体夹具的侧板平移机构的侧板平移稳定组件的放大立体图;
52.图11为本发明所采用的箱体焊接设备的激光填丝焊接机构的立体图;
53.图12为本发明所采用的箱体焊接设备的激光填丝焊接机构的送丝管摆动机构的放大立体图。
具体实施方式
54.下面将参考附图并结合实施例,来详细说明本发明。此处所作说明用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
55.本发明提供了一种箱体焊接方法,该方法基于以下箱体焊接设备实现:
56.参见图1-3所示,该箱体焊接设备包括夹具变位机1、箱体夹具2、箱体吊具3、地轨机器人4、激光填丝焊接机构5、箱体拼接检测相机6和箱体拼接检测相机机械手7,所述箱体
夹具2的左右两端底部分别与一个所述夹具变位机1固定连接,两个所述夹具变位机1同步工作,所述地轨机器人4设置在所述箱体夹具2的后侧,所述激光填丝焊接机构5安装在所述地轨机器人4上,所述箱体吊具3设置在所述箱体夹具2的上方,所述箱体夹具2前侧的左右两端分别设置有一个所述箱体拼接检测相机6,两个所述箱体拼接检测相机6通过各自对应的所述箱体拼接检测相机机械手7分别安装在同侧的所述夹具变位机1上。
57.参见图4所示,所述箱体夹具2包括一根底梁201、两个端板夹持平移机构202、两个侧板夹持机构203和一个侧板平移机构204,所述侧板平移机构204设置在所述底梁201的上表面,两个所述侧板夹持机构203均设置在所述侧板平移机构204上,两个所述侧板夹持机构203通过所述侧板平移机构204实现在所述底梁201上的前后开合,两个所述端板夹持平移机构202相对地设置在所述底梁201上表面的左右两端。
58.参见图5-6所示,所述端板夹持平移机构202包括一个端板夹持平移机构立柱平台2021,所述端板夹持平移机构立柱平台2021上通过对应的滑轨设置有三角支架2022,所述端板夹持平移机构立柱平台2021上通过对应的固定座设置有三角支架平移气缸2023,所述三角支架平移气缸2023的伸缩杆与所述三角支架2022的后表面连接,所述三角支架2022的前表面上固定有一块端板夹持侧支架2024,所述端板夹持侧支架2024的顶部设置有端板顶部夹持组件2025,所述端板夹持侧支架2024的底部设置有端板底部夹持组件2026,所述端板夹持侧支架2024的两侧均设置有上下两组端板侧部夹持组件2027;所述三角支架2022的前部两侧分别通过对应的安装板设置有一个用于感应端板是否放置到位的端板接近开关2028;所述端板夹持平移机构立柱平台2021上的两侧均通过对应的固定座设置有水平向后的三角支架油压缓冲器2029和凹型限位块202x,所述三角支架2022后部的两侧均通过对应的固定板设置有能与同侧的所述凹型限位块202x相配合的凸型限位块202y,且所述三角支架油压缓冲器2029向后对准与其同侧的所述凹型限位块202x所在的固定板的前侧面。
59.参见图7所示,所述侧板夹持机构203包括两个侧板夹持机构框架2031,所述侧板夹持机构框架2031的外侧面上根据待焊接箱体的侧板层数设置有若干层侧板夹持位,每层所述侧板夹持位上均并排地设置有若干组侧板夹持组件2032,每层所述侧板夹持位上均设置有若干个侧板上表面垫块2033,所述侧板上表面垫块2033均通过对应的垫块固定板与所述侧板夹持机构框架2031固定连接;所述侧板夹持位上均设置有一对侧板接近开关2034,且所述侧板接近开关2034均通过对应的开关固定板与所述侧板夹持机构框架2031固定连接。
60.参见图8-10所示,所述侧板平移机构204包括侧板平移驱动组件和侧板平移稳定组件,所述侧板平移驱动组件包括两块用于承载所述侧板夹持机构框架2031的平移板2041,两块所述平移板2041通过若干条并列的平移板滑轨2042可前后开合地设置在所述底梁201中部的上表面,所述底梁201的下表面设置有两组平移板推拉气缸2043,其中一组所述平移板推拉气缸2043的主体位于前侧的所述平移板2041的下方,且其输出端则与后侧的所述平移板2041连接,另一组所述平移板推拉气缸2043的主体位于后侧的所述平移板2041的下方,且其输出端则与前的所述平移板2041连接;所述侧板平移稳定组件包括两根竖立在所述底梁201中部上表面的侧板平移稳定组件立柱2044,每根所述侧板平移稳定组件立柱2044上均设置有一块侧板平移稳定组件安装板2045,所述侧板平移稳定组件安装板2045上通过对应的气缸安装板设置有上下排列的侧板平移稳定前推气缸2046和侧板平移稳定
后推气缸2047,所述侧板平移稳定前推气缸2046和所述侧板平移稳定后推气缸2047的输出端分别设置有侧板平移稳定前推板2048和侧板平移稳定后推板2049,所述侧板平移稳定前推板2048和所述侧板平移稳定后推板2049的两端分别设置有用于与所述侧板夹持机构框架2031固定连接的侧板平移稳定推板连接块204x;所述侧板平移稳定组件立柱2044的左右两个侧面分别设置有一条用于与所述侧板夹持机构框架2031滑动连接的侧板平移稳定滑轨204y;所述底梁201的中部上表面通过对应的缓冲器支架设置有若干个平移板油压缓冲器204z,所述平移板油压缓冲器204z均匀分布在两块所述平移板2041的前侧和后侧。
61.所述底梁201和所述平移板2041的上表面均通过对应的垫块支架设置有箱体托举垫块8。
62.参见图11-12所示,所述激光填丝焊接机构5包括激光焊接头501、安装立板502、安装横板503、激光焊接头固定座504、送丝管505、送丝嘴506、送丝管固定支架507和送丝管摆动机构508;所述安装横板503固定在所述安装立板502的顶部,所述激光焊接头501通过所述激光焊接头固定座504安装在所述安装横板503的上表面,所述送丝管摆动机构508位于所述激光焊接头501的一侧,且所述送丝管摆动机构508设置在所述安装横板503上,所述送丝管505通过所述送丝管固定支架507设置在所述送丝管摆动机构508上,所述送丝管505的后端与送丝机连接,所述送丝管505的前端设置有所述送丝嘴506,所述送丝管摆动机构508通过带动所述送丝管505摆动实现所述送丝嘴506靠近或远离所述激光焊接头501,且当所述送丝嘴506靠近所述激光焊接头501时,所述送丝嘴506对准所述激光焊接头501的焦点位置。
63.所述激光焊接头501设置有一个焊缝寻位相机509,所述焊缝寻位相机509通过焊缝寻位相机固定支架510安装在所述安装横板503上,且所述焊缝寻位相机509对准所述激光焊接头501的焦点位置。
64.所述送丝管505上设置有保护气吹嘴,所述保护气吹嘴的尾端与保护气气源连接,所述保护气吹嘴的前端在所述送丝嘴506靠近所述激光焊接头501时同样对准所述激光焊接头501的焦点位置。
65.所述送丝管摆动机构508包括摆动气缸5081和摆杆组件,所述摆动气缸5081竖直向上的设置在所述安装横板503的下表面,所述摆杆组件的一端与所述摆动气缸5081的转轴连接,所述摆杆组件的另一端与所述送丝管固定支架507连接。
66.所述摆杆组件由第一摆杆5082、第二摆杆5083和送丝管固定支架安装板5084组成,所述第一摆杆5082与所述第二摆杆5083平行地设置在所述安装横板503的上表面,其中所述第一摆杆5082的后端与所述摆动气缸5081的转轴连接,所述第二摆杆5083的后端与所述安装横板503的上表面铰接,所述第一摆杆5082的前端和所述第二摆杆5083的前端分别与所述送丝管固定支架安装板5084的下表面铰接,所述送丝管固定支架507竖立设置在所述送丝管固定支架安装板5084上。
67.本发明的一种箱体焊接方法,参见图1-12所示,包括以下步骤:
68.s100、在夹具变位机1的配合下,工作人员将待焊接箱体的侧板和端板分别放置到箱体夹具2的对应位置并夹紧固定;随后箱体夹具2将两侧端板同时向侧板的左右两端推进到位,完成端板与侧板预拼接,并在焊接位置留出相应焊缝;具体过程如下:
69.s101、左右两个端板夹持平移机构202上的三角支架平移气缸2023驱动各自对应
的三角支架2022向外平移,从而使得左右两个端板夹持侧支架2024向左右两侧打开,同时,侧板平移机构204的侧板平移驱动组件中的两组平移板推拉气缸2043驱动各自对应的两块平移板2041向外平移,从而使得两个侧板夹持机构203向前后两侧打开,在打开过程中,侧板平移机构204的侧板平移稳定组件中的两组前后对置的侧板平移稳定前推气缸2046和侧板平移稳定后推气缸2047分别与两组平移板推拉气缸2043同步工作,平稳推动各自对应的侧板夹持机构203的侧板夹持机构框架2031,从而保证两个侧板夹持机构203在打开时上下保持稳定;
70.s102、工作人员通过箱体吊具3将一块端板放置到对应的一个端板夹持平移机构202上,当该端板夹持平移机构202上的端板接近开关2028感应到端板到位后,端板夹持平移机构202上的端板顶部夹持组件2025、端板底部夹持组件2026和端板侧部夹持组件2027分别对端板进行定位、夹紧,然后以同样的方法将另一块端板在另一个端板夹持平移机构202上定位、夹紧;
71.s103、工作人员继续通箱体吊具3将前侧面的侧板放置到前侧的侧板夹持机构203上,当侧板夹持机构203上的侧板接近开关2034感应到侧板到位后,侧板夹持机构203上的若干组侧板夹持组件2032同时对侧板进行定位、夹紧;然后夹具变位机1带动箱体夹具2向前后向后翻转180度,并以同样的方法将后侧面的侧板放置到后侧的侧板夹持机构203上定位、夹紧;
72.s104、左右两个端板夹持平移机构202上的三角支架平移气缸2023驱动各自对应的三角支架2022向内平移,从而使得左右两个端板夹持侧支架2024由左右两侧向中央推进到位,到位后,左右两侧的端板在各自对应的端板夹持平移机构202的夹持下分别与位于侧板夹持机构203上的侧板完成预拼接,并在焊接位置留出相应焊缝;
73.s105、夹具变位机1带动箱体夹具2翻转180度复位。
74.s200、在夹具变位机1的配合下,箱体拼接检测相机6对左右两侧的拼接处进行拍照检测,以此确认几块侧板能否对齐;具体过程如下:
75.箱体夹具2前侧的左右两端分别设置有一个箱体拼接检测相机6,且两个箱体拼接检测相机6分别通过对应的箱体拼接检测相机机械手7安装在同侧的夹具变位机1上;
76.当检查箱体侧板是否对齐时,左右两侧的箱体拼接检测相机6在各自对应的箱体拼接检测相机机械手7的带动下,先分别对箱体前表面的拼接处进行拍照检测,随后左右两个夹具变位机1同时带动箱体夹具2翻转180度,左右两侧的箱体拼接检测相机6在各自对应的箱体拼接检测相机机械手7的带动下,继续分别对箱体后侧面的拼接处进行拍照检测;
77.最后夹具变位机1带动箱体夹具2翻转180度复位。
78.s300、地轨机器人4带动激光填丝焊接机构5从箱体夹具2一侧的左端移动至右端并回位,在此次来回移动过程中,激光填丝焊接机构5上的焊缝寻位组件在夹具变位机1的配合下,对箱体两侧的每处焊缝进行焊缝寻位检测;具体过程如下:
79.s301、地轨机器人4的地轨组件带动激光填丝焊接机构5移动至箱体夹具2后侧的左端,然后地轨机器人4的机械手组件带动激光填丝焊接机构5上的焊缝寻位组件先对箱体后侧面左端的焊缝进行寻位确认,接着地轨机器人4的机械手组件带动激光填丝焊接机构5上的激光焊接组件、送丝组件、吹保护气组件配合工作,对箱体后侧左端的焊缝进行激光焊接或激光填丝焊接;
80.s302、地轨机器人4的地轨组件带动激光填丝焊接机构5移动至箱体夹具2后侧的右端,然后地轨机器人4的机械手组件带动激光填丝焊接机构5上的焊缝寻位组件先对箱体后侧面右端的焊缝进行寻位确认,接着地轨机器人4的机械手组件带动激光填丝焊接机构5上的激光焊接组件、送丝组件、吹保护气组件配合工作,对箱体后侧右端的焊缝进行激光焊接或激光填丝焊接;
81.s303、夹具变位机1带动箱体夹具2翻转180度,随后地轨机器人4的地轨组件带动激光填丝焊接机构5移动至箱体夹具2前侧面的左端,然后地轨机器人4的机械手组件带动激光填丝焊接机构5上的焊缝寻位组件先对箱体前侧面左端的焊缝进行寻位确认,接着地轨机器人4的机械手组件带动激光填丝焊接机构5上的激光焊接组件、送丝组件、吹保护气组件配合工作,对箱体前侧面左端的焊缝进行激光焊接或激光填丝焊接;
82.s304、夹具变位机1带动箱体夹具2翻转180度,随后地轨机器人4的地轨组件带动激光填丝焊接机构5移动至箱体夹具2前侧面的右端,然后地轨机器人4的机械手组件带动激光填丝焊接机构5上的焊缝寻位组件先对箱体前侧面右端的焊缝进行寻位确认,接着地轨机器人4的机械手组件带动激光填丝焊接机构5上的激光焊接组件、送丝组件、吹保护气组件配合工作,对箱体前侧面右端的焊缝进行激光焊接或激光填丝焊接;
83.s305、夹具变位机1带动箱体夹具2翻转180度复位,最后地轨机器人4的地轨组件带动激光填丝焊接机构5复位。
84.进一步的,所述焊缝寻位组件为一个焊缝寻位相机509,所述焊缝寻位相机509通过对应的支架安装在激光填丝焊接机构5的激光焊接头501的一侧,且所述焊缝寻位相机509对准所述激光焊接头501的焦点位置,在焊缝寻位时,只需要将激光焊接头501对准焊缝位置,便可使得所述焊缝寻位相机509对焊缝进行拍照确认。
85.进一步的,在焊接时,若遇到间隙较小的焊缝,则激光填丝焊接机构5上的激光焊接组件直接对焊缝进行激光焊接,若遇到间隙较大的焊缝,则激光填丝焊接机构5上的送丝组件会在激光焊接时进行送丝,并且激光填丝焊接机构5上吹保护气组件同时会吹保护气,从而对焊缝进行激光填丝焊接。送丝组件会根据设定的程序,靠近或远离激光焊接组件,具体方法如下:
86.当激光焊接组件的激光焊接头501移动至较小的焊缝时,送丝组件的摆动气缸5081通过第一摆杆5082、第二摆杆5083和送丝管固定支架安装板5084将送丝管505向外摆动,从而使得送丝组件的送丝嘴506远离激光焊接组件的激光焊接头501,此时对焊缝只进行激光焊接;激光焊接组件的激光焊接头501移动至较大的焊缝时,送丝组件的摆动气缸5081通过第一摆杆5082、第二摆杆5083和送丝管固定支架安装板5084将送丝管505向内摆动,从而使得送丝组件的送丝嘴506靠近激光焊接头501,此时送丝嘴506和保护气吹嘴均对准焊缝,在激光焊接的同时进行送丝和出保护气体,进而实现填丝激光焊接。
87.s400、箱体夹具2松开焊接好的箱体,并留出便于箱体吊装的避让空间,最后工作人员将焊接好的箱体从箱体夹具2上吊装转运,完成下料;具体过程如下:
88.s401、端板夹持平移机构202上的端板顶部夹持组件2025、端板底部夹持组件2026和端板侧部夹持组件2027松开端板,侧板夹持机构203上各层的侧板夹持位的侧板夹持组件2032松开侧板;
89.s402、左右两侧的端板夹持平移机构202上的三角支架平移气缸2023驱动各自对
应的三角支架2022向外平移,从而使得左右两个端板夹持侧支架2024向左右两侧打开;
90.s403、侧板平移机构204的侧板平移驱动组件中的两组平移板推拉气缸2043驱动各自对应的两块平移板2041向内平移,从而使得两个侧板夹持机构203由前后两侧向内合拢;在合拢过程中,侧板平移机构204的侧板平移稳定组件中的两组前后对置的侧板平移稳定前推气缸2046和侧板平移稳定后推气缸2047分别与两组平移板推拉气缸2043同步工作,平稳推动各自对应的侧板夹持机构203的侧板夹持机构框架2031,从而保证两个侧板夹持机构203在合拢时上下保持稳定;
91.s404、此时所有夹持机构均完成退让工作,焊接后的箱体全部支撑在底梁201上的四个箱体托举垫块8上,最后,工作人员通过箱体吊具3将焊接好的箱体从箱体夹具2上吊装运走即可。
92.进一步的,所述箱体夹具2、所述夹具变位机1和所述箱体拼接检测相机6可以设置成并排的两组,从而形成双工位,而所述地轨机器人4和所述激光填丝焊接机构5设置一组,轮流在双工位之间交替工作,从而提高焊接效率。
93.本发明还提供了一种计算机存储介质,所述计算机存储介质中存储有至少一个可执行指令,所述可执行指令使处理器执行上述任意一项所述的箱体焊接方法对应的操作。
94.由于本发明可以对箱体进行精确地激光填丝焊接,且焊接处平整度较高,因此箱体的板材可以在焊接前先进行喷涂工序,只需在边缘处留出焊接位置,等全部焊接完之后,再对焊接处进行补喷即可,这就使得焊接后的箱体无须再进行打磨,也避免了产品因打磨而造成的形变,不仅减少了加工工序,同时保证了产品的质量。本发明通过地轨机器人以及夹具变位机能轻松完成辅助上板、箱体翻转、自动拼接、拼接对齐检测、焊缝寻位等功序,自动化程度高,加工时间短,不仅大大提高了焊接效率,并且减少了劳动强度。
95.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。