1.本发明涉及悬臂式斗轮堆取料技术领域,尤其涉及该技术领域中的设备防撞技术。
背景技术:
2.我国引进生产斗轮堆取料机始于1970年左右,目前生产斗轮堆取料机的厂家全国有10家左右,产品广泛应用于各个领域,市场遍布国内外。分为门式斗轮堆取料机和悬臂式斗轮堆取料机,其中悬臂式斗轮堆取料机占大部分。
3.悬臂式斗轮堆取料机,是一种用于大型干散货堆场的兼具堆料和取料功能且能够连续输送物料的高效装卸机械。斗轮堆取料机由可俯仰和水平摆动的胶带输送臂及其前端的斗轮、机架和运行机构组成,胶带可双向运行,取料时,物料经斗轮取料后进入胶带机,然后经导料槽输送至中心落料管后,再经系统胶带机输送至料仓,堆料时,物料通过尾车进入胶带机后再经导料槽输送至料场。
4.目前已知的悬臂式斗轮堆取料机,前臂头部都不具有防撞保护功能;且实际应用场景是前臂头部平台、设备经常发生碰撞损坏,经实际调查统计,由于取料时平台经常插入料堆,前臂长度为25米
‑‑
50米,属于视线盲区,发生碰撞的设备在80%左右,碰撞损坏设备的在50%左右,设备损坏率高。
技术实现要素:
5.本发明解决了臂式斗轮堆取料机前臂头部都不具有防撞保护功能的问题。
6.悬臂式斗轮堆取料机前臂头部防撞系统,包括工作平台,所述防撞系统包括:
7.前方防撞单元、下方防撞单元和左侧侧方防撞单元;
8.所述前方防撞单元,用于检测所述工作台前方的障碍物体,所述前方防撞单元包括一个前方检测梁和至少两个前方防撞传感器,所述前方防撞传感器包括压力传感单元、弹性部件、固定座和活动支撑部件,所述固定座为圆桶型,其内底部固定压力传感单元,活动支撑部件的底部嵌入所述圆桶内,所述活动支撑部件的顶端位于所述圆桶外部,且活动支撑部件能够在所述圆桶内沿圆桶轴线做往复运动,弹性部件位于活动支撑部件底部和压力传感单元之间;所述前方防撞传感器的固定座与工作台固定连接,前方防撞传感器的活动支撑部件的顶端与前方检测梁连接;
9.所述左侧侧方防撞单元位于工作台的左侧,用于检测所述工作台左侧的障碍碰撞物体,所述左侧侧方防撞单元包括一个侧方检测梁和至少两个侧方防撞传感器,所述侧方防撞传感器的结构与前方防撞传感器的结构相同,所述侧方防撞传感器的固定座与工作台的侧面固定连接,侧方防撞传感器的活动支撑部件的顶端与侧方检测梁连接;
10.所述下方防撞单元,用于检测下方存在碰撞物体,所述下方防撞单元包含一个下方检测部件和至少两个的下方防撞传感器,所述下方防撞传感器与前方防撞传感器的结构相同;所述下方防撞传感器的固定座与工作台下表面固定连接,下方防撞传感器的活动支
撑部件的顶端与下方检测部件连接。
11.进一步,所述前方防撞传感器、下方防撞传感器和侧方传感器的压力传感单元均采用压力传感器实现。
12.进一步,所述前方防撞传感器的活动支撑部件的顶端与前方检测梁的连接方式为铰接。
13.进一步,侧方防撞传感器的活动支撑部件的顶端与侧方检测梁的连接方式为铰接。
14.进一步,所述前方防撞传感器还包括弹簧连接块和限位套,所述弹簧连接块固定在压力传感单元上,所述弹簧连接块与弹性部件的一端固定连接,活动支撑部件的底部设置有凹槽,所述弹性部件的另一端嵌入所述凹槽内,所述活动支撑部件的底部外侧壁设置有突起的限位环,所述限位环与固定座内壁之间间隙配合;限位套固定在所述固定座内壁上、且临近固定座的开口侧。
15.进一步,所述下方防撞传感器的活动支撑部件的顶端与下方检测部件的连接方式为铰接。
16.进一步,所述下方检测部件包括框架和接触网,所述框架为矩形框架,所述接触网位于所述矩形框架内、且与所述矩形框架固定连接,所述至少两个的下方防撞传感器固定在所述矩形框架的下方。
17.进一步,所述下方防撞单元包括四个下方防撞传感器,所述四个下方防撞传感器分别固定在所述矩形框架的四个边框的底部。
18.进一步,所述前方防撞传感器、下方防撞传感器和侧方传感器的弹性部件均采用弹簧实现。
19.进一步,所述头部防撞系统还包括压力信号采集单元、plc处理单元和显示器,所述压力信号采集单元用于采集所有前方防撞传感器、侧方防撞传感器和下方防撞传感器的压力信号,并发送给plc处理单元,所述plc处理单元用于在接收到的任意一个或多个压力信号大于设定值时发送预警信号给显示器,所述显示器用于显示预警信息。
20.本发明的优点在于:
21.(1)本发明通过在臂式斗轮堆取料机前臂头部的前方、下方和侧方分别设置前方防撞单元、下方防撞单元和侧方防撞单元,实现在这个前臂头部的前方下方或侧方碰撞到物体的时候,及时获取相应的信号;在实际工作过程中,可以通过获得信号,控制机器的运行,避免碰撞物体,防止对设备造成损害。
22.(2)本发明所述的前臂头部防撞系统,能够有效的保证悬臂式斗轮堆取料机更好的工作,保证了悬臂式斗轮堆取料机的安全性,提高使用寿命,减轻设备维修的时间成本和财务成本,提高设备有效工作时间。
23.(3)本发明所述的防撞传感器内部均采用弹性部件,连接在压力采集单元和活动支撑部件之间。活动支撑部件是用于采集碰撞信号的,由于弹性部件的存在,使得在采集压力的过程中不会损坏压力采集单元,避免防撞传感器整体损坏,进而延长了防撞传感器的使用寿命。
24.(4)本发明对悬臂式斗轮堆取料机取料工作具有针对性,根据悬臂式堆取料机取料的实际工况研发;显示屏、传感器及机械机构配合实现,利用机械结构与电气控制结合互
补方式,可有效减少斗轮堆取料机前臂头部平台在生产作业中发生碰撞,降低碰撞对设备的损坏,减轻设备维修的时间成本和财务成本,提高设备有效工作时间。
25.本发明适用于悬臂式斗轮堆取料设备改造领域。
附图说明
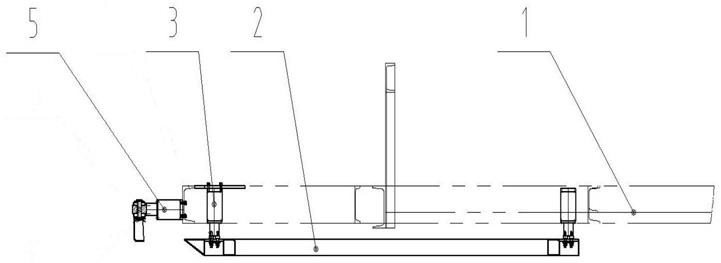
26.图1为本发明所述的悬臂式斗轮堆取料机前臂头部防撞系统主视图。
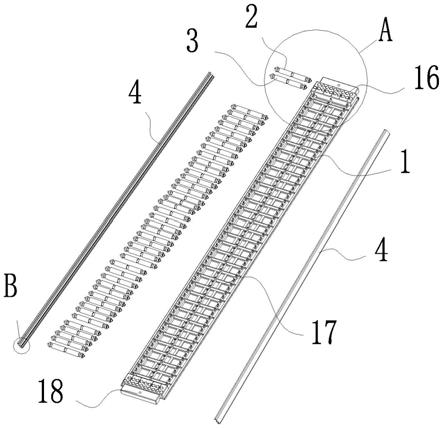
27.图2为图1的附视图;图中包括:工作台1,下方检测部件2,下方防撞传感器3,前方防撞传感器5,前方检测梁8,侧方防撞传感器9,侧方检测梁10,框架2-1,接触网2-2。
28.图3为本发明实施例所述的前方及侧方防撞传感器;图中包括:固定座底部s11,压力传感单元s12,弹簧连接块s13,弹性部件s14,固定座侧壁s15,限位套s16,压盖s17,活动支撑部件s18。
29.图4为本发明实施例所述的下方防撞传感器;图中包括:固定座底部x11,压力传感单元x12,弹簧连接块x13,弹性部件x14,固定座侧壁x15,限位套x16,压盖x17,活动支撑部件x18。
具体实施方式
30.以下将配合附图及实施例来详细说明本技术的实施方式,对本技术如何应用技术手段来解决技术问题并达成技术功效的实现过程能充分理解并据以实施。
31.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互结合。
32.在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.实施例一、参见图1、图2说明本实施例。本实施例所述的悬臂式斗轮堆取料机前臂头部防撞系统,包括工作平台,所述防撞系统包括:
34.前方防撞单元、下方防撞单元和左侧侧方防撞单元;
35.所述前方防撞单元,用于检测所述工作台1前方的障碍物体,所述前方防撞单元包括一个前方检测梁8和至少两个前方防撞传感器5,所述前方防撞传感器5包括压力传感单元、弹性部件、固定座和活动支撑部件,所述固定座为圆桶型,其内底部固定压力传感单元,活动支撑部件的底部嵌入所述圆桶内,所述活动支撑部件的顶端位于所述圆桶外部,且活动支撑部件能够在所述圆桶内沿圆桶轴线做往复运动,弹性部件位于活动支撑部件底部和压力传感单元之间;所述前方防撞传感器5的固定座与工作台1固定连接,前方防撞传感器5的活动支撑部件的顶端与前方检测梁8连接;
36.所述左侧侧方防撞单元位于工作台1的左侧,用于检测所述工作台1左侧的障碍碰撞物体,所述左侧侧方防撞单元包括一个侧方检测梁10和至少两个侧方防撞传感器9,所述侧方防撞传感器9的结构与前方防撞传感器5的结构相同,所述侧方防撞传感器9的固定座与工作台1的侧面固定连接,侧方防撞传感器9的活动支撑部件的顶端与侧方检测梁8连接;
37.所述下方防撞单元,用于检测下方存在碰撞物体,所述下方防撞单元包含一个下
方检测部件2和至少两个的下方防撞传感器3,所述下方防撞传感器3与前方防撞传感器5的结构相同;所述下方防撞传感器3的固定座与工作台1下表面固定连接,下方防撞传感器3的活动支撑部件的顶端与下方检测部件2连接。
38.本实施例所述的防撞系统在实际使用的过程中,前方防撞单元的前方检测梁8碰撞物体时,所述前方防撞传感器5接收碰撞信号,所述前方防撞传感器5的活动支撑部件s18延限位套s16向下滑动,所述活动支撑部件s18压缩弹性部件,所述弹性部件的压力信号传递至压力采集单元,所述压压力采集单元采集到的压力信号,并将压力信号输出。在实际应用中,一方面可以直接发送给悬臂式斗轮堆取料机的主机,所述悬臂式斗轮堆取料机的主机发出信号可以控制设备停停止工作,避免发生碰撞;另一方面压力信号传递给报警系统,产生碰撞报警信号。侧方防撞单元和下方防撞单元工作原理同前方防撞单元。
39.本实施例中,通过防撞传感器将机械结构与电气控制相互结合形成的前臂头部防撞系统,可有效减少斗轮堆取料机前臂头部平台在生产作业中发生碰撞,降低碰撞率,减少对悬臂式斗轮堆取料机的损坏,减轻设备维修的时间成本和财务成本,提升设备有效工作时间。
40.实施例二、参见图3说明本实施例。本实施例是对实施例一所述的悬臂式斗轮堆取料机前臂头部防撞系统的进一步限定,所述前方防撞传感器5、下方防撞传感器3和侧方传感器9的压力传感单元均采用压力传感器实现。
41.本实施例中,多个传感器与悬臂式堆取料机结合,保障悬臂式斗轮堆取料机的安全性,避免发生碰撞。
42.实施例三、参见图1和图2说明本实施例。本实施例是对实施例一所述的悬臂式斗轮堆取料机前臂头部防撞系统的进一步限定,所述前方防撞传感器5的活动支撑部件的顶端与前方检测梁8的连接方式为铰接。
43.本实施例所述的防撞系统在实际使用的过程中,前方防撞传感器活动支撑部件的顶端与前方检测梁采用铰接,不是刚性连接,防止前方防撞传感器损坏,且安装简便;在实际应用中,可采用开口销连接活动支撑部件的顶端与所述前方检测梁。
44.优选的,前方防撞传感器5的活动支撑部件的顶端设置有径向通孔,所述前方检测梁8与所述前方防撞传感器5连接的位置设置有通孔,所述活动支撑部件的顶端与所述前方检测梁8通过开口销7连接。
45.实施例四、参见图1和图2说明本实施例。本实施例是对实施例一所述的悬臂式斗轮堆取料机前臂头部防撞系统的进一步限定,所述侧方防撞传感器9的活动支撑部件的顶端与侧方检测梁10的连接方式为铰接。
46.实施例五、参见图3说明本实施例。本实施例是对实施例一所述的悬臂式斗轮堆取料机前臂头部防撞系统的进一步限定,所述前方防撞传感器5还包括弹簧连接块s13和限位套s16,所述弹簧连接块s13固定在压力传感单元上,所述弹簧连接块s13与弹性部件的一端固定连接,活动支撑部件s18的底部设置有凹槽,所述弹性部件的另一端嵌入所述凹槽内,所述活动支撑部件s18的底部外侧壁设置有突起的限位环s16,所述限位环s16与固定座内壁之间间隙配合;限位套s16固定在所述固定座内壁上、且临近固定座的开口侧。
47.本实施例所述的防撞系统在实际使用的过程中,采用圆盘构建固定座底部s11,固定座侧壁s15固定在固定座底部s11;压盖s17在实际应用中采用密封盖,避免前方防撞传感
器5中进入灰尘。
48.实际工作时,活动支撑部件s18向固定座方向移动压缩弹性部件,弹性部件受力之后,将这个压力传递给压力采集单元,然后压力采集单元采集压力信号并输出。
49.活动支撑部件s18没有受到压力时,活动支撑部件s18在弹性部件的弹力下,向固定座之外延伸,延伸至限位套s16的位置,活动支撑部件s18恢复到正常状态。
50.实施例六、参见图4说明本实施例。本实施例是对实施例一所述的悬臂式斗轮堆取料机前臂头部防撞系统的进一步限定,所述下方防撞传感器9的活动支撑部件的顶端与下方检测部件2的连接方式为铰接。
51.实施例七、参见图2说明本实施例。本实施例是对实施例一所述的悬臂式斗轮堆取料机前臂头部防撞系统的进一步限定,所述下方检测部件2包括框架2-1和接触网2-2,所述框架2-1为矩形框架,所述接触网2-2位于所述矩形框架内、且与所述矩形框架固定连接,所述至少两个的下方防撞传感器3固定在所述矩形框架的下方。
52.本实施例中,接触网直接和物体接触,进行探测,所述接触网2-2可以为方形网孔的格栅板或组焊成型的细钢筋网,在具体实施过程中,网孔尺寸可根据实际需求设计,以最大可能检测到物体为准。
53.实施例八、参见图2说明本实施例。本实施例是对实施例七所述下方防撞单元包括四个下方防撞传感器3,所述四个下方防撞传感器3分别固定在所述矩形框架的四个边框的底部。
54.所述下方防撞传感器5还包括弹簧连接块x13和限位套x16,所述弹簧连接块x13固定在压力传感单元上,所述弹簧连接块x13与弹性部件的一端固定连接,活动支撑部件x18的底部设置有凹槽,所述弹性部件的另一端嵌入所述凹槽内,所述活动支撑部件x18的底部外侧壁设置有突起的限位环x16,所述限位环x16与固定座内壁之间间隙配合;限位套x16固定在所述固定座内壁上、且临近固定座的开口侧。
55.所述下方传感器的个数,可以根据矩形框的面积而定。当检测面积比较大的时候,可以在矩形框的边框上等间距设置多个传感器。
56.实际应用时,采用圆盘构建固定座底部x11,固定座侧壁x15固定在固定座底部x11;压盖x17在实际应用中采用密封盖,避免下方防撞传感器3中进入灰尘。
57.实际工作时,活动支撑部件x18向固定座方向移动压缩弹性部件,弹性部件受力之后,将这个压力传递给压力采集单元,然后压力采集单元采集的压力信号并输出。
58.活动支撑部件x18没有受到压力时,活动支撑部件x18在弹性部件的弹力下,向固定座之外延伸,延伸至限位套x16的位置,活动支撑部件x18恢复到正常状态。
59.所述矩形框架上设置至少两个螺纹孔,矩形框架与下方检测部件固定连接。
60.实施例九、参见图3和图4说明本实施例。本实施例是对实施例一所述的悬臂式斗轮堆取料机前臂头部防撞系统的进一步限定,前方防撞传感器5、下方防撞传感器3和侧方传感器9的弹性部件均采用弹簧实现。每个防撞传感器组装时,会有一个预压缩量,以保证滑杆在不受外力时的稳定。
61.实施例十、本实施例是对实施例一所述的悬臂式斗轮堆取料机前臂头部防撞系统的进一步限定,所述头部防撞系统还包括压力信号采集单元、plc处理单元和显示器,所述压力信号采集单元用于采集所有前方防撞传感器5、侧方防撞传感器9和下方防撞传感器3
的压力信号,并发送给plc处理单元,所述plc处理单元用于在接收到的任意一个或多个压力信号大于设定值时发送预警信号给显示器,所述显示器用于显示预警信息。
62.本实施例实现了将这个实施例一至九所述悬臂式斗轮堆取料机前臂头部防撞系统采集的压力信号,及时的进行转换,并且显示突出起到机器预警停止运行的作用;本实施例所述的显示器还支持操作人员进行不同的悬臂式斗轮堆取料机预警设定值的设置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。