1.本发明属于并联机构技术领域,特别是涉及一种长臂复合驱动六自由度并联机构。
背景技术:
2.蒙皮是飞机的主要承力件,属于空间复杂自由曲面,在飞行过程中,容易受到空气的腐蚀和摩擦而出现受损,从而危害飞机的飞行安全。因此,为了保证飞机的飞行安全,需要及时对飞机蒙皮进行包括打磨在内的维护工作。
3.蒙皮的打磨工作目前依然主要依靠人工,存在着打磨效率低、精度差、成本高等问题,急需开发基于机器人的自动化打磨设备,以代替人工作业。并联机构具有良好的性能,能够较好地替代人工进行飞机蒙皮的打磨工作,可以稳定持续工作,有效提升蒙皮打磨的速度和精度,减少飞机的维护成本,具有极大的经济价值。为此,中国发明专利公开号cn202010188841.5中公开了一种六自由度并联机构,并采用复合驱动方式,但是该机构的缺点是工作空间、各向同性、伸缩杆受力等性能较差。
技术实现要素:
4.为了解决上述问题,本发明的目的在于提供一种长臂复合驱动六自由度并联机构。
5.为了达到上述目的,本发明提供的长臂复合驱动六自由度并联机构包括基座、近端驱动器和远端执行器;
6.其中,所述基座包括三个第一铰接支座、三个第二铰接支座和底板;三个第一铰接支座按照中心对称方式安装在底板的顶面外侧部位;三个第二铰接支座按照中心对称方式安装在底板的顶面内侧部位;第一铰接支座和第二铰接支座的顶面为相对于底板的顶面呈倾斜状态的倾斜面,每一个第一铰接支座和一个第二铰接支座为一对且关于对称点中心对称,三个对称点组成正三角形,且正三角形的中心与底板的中心重合;
7.所述近端驱动器包括结构相同且分别安装在一对第一铰接支座和第二铰接支座的第一支链、第二支链和第三支链;每个支链包括电机、伸缩缸、底座和变形虎克铰;两个底座的下端分别铰接在第一铰接支座和第二铰接支座上,由此分别组成第一转动副和第二转动副,并且第一转动副的转动轴线与第一铰接支座的倾斜面平行,第二转动副的转动轴线与第二铰接支座的倾斜面平行;每个底座上同时安装一台电机和一个伸缩缸,电机的输出端与伸缩缸上的推杆内端相连接;变形虎克铰包括一根长轴和一根短轴;其中长轴包括中间圆轴和两根半长轴,两根半长轴的一端分别连接在中间圆轴的两端且两根半长轴的轴线间具有夹度;短轴包括轴座和两根半短轴,两根半短轴的一端分别连接在轴座的两侧面上,并且轴座中部沿垂直于半短轴的轴线方向形成有一个中心圆孔,中心圆孔以转动的方式套在长轴的中间圆轴上而组成第五转动副;两根半长轴分别铰接在两个伸缩缸上的推杆外端,由此分别组成第三转动副和第四转动副,两根半长轴的轴线分别与第一转动副和第二
转动副的转动轴线平行;
8.所述远端执行器包括长臂操纵杆、球铰和动平台;其中三根长臂操纵杆的上端分别通过一个球铰按照中心对称方式间隔连接在动平台的底面上,下端分别与三个支链上的短轴铰接而组成第六转动副,并且第六转动副的转动轴线与短轴的轴线重合。
9.所述底板为正三角形板状结构;第一铰接支座与第二铰接支座的结构相同。
10.所述变形虎克铰上两根半长轴的轴线间夹度为150
°
11.所述长臂操纵杆采用刚性长杆。
12.所述动平台为正三角形板状结构。
13.本发明提供的长臂复合驱动六自由度并联机构具有如下优点:
14.1、操纵杆采用刚性长杆,可以大幅摆动,使动平台具有较大的工作空间,弥补并联机构工作空间狭小的缺陷。
15.2、该并联机构具有一种特殊的变形虎克铰设计,且底板上装有铰接支座,铰接支座上部有一倾斜面,该设计可以很好地改善了伸缩杆受力情况并大大增加机构的稳定性。
16.3、第一支链、第二支链、第三支链结构完全相同,可大大减小生产与维护成本。
附图说明
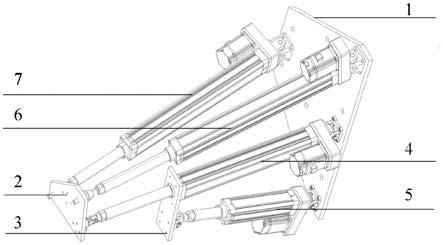
17.图1为本发明提供的长臂复合驱动六自由度并联机构结构示意图。
18.图2为本发明提供的长臂复合驱动六自由度并联机构中底板结构示意图。
19.图3为本发明提供的长臂复合驱动六自由度并联机构中底板与近端驱动器结构示意图。
20.图4为本发明提供的长臂复合驱动六自由度并联机构中远端执行器结构示意图。
21.图5为本发明提供的长臂复合驱动六自由度并联机构中变形虎克铰结构示意图。
22.图6为本发明提供的长臂复合驱动六自由度并联机构中变形虎克铰的长轴结构示意图。
23.图7为本发明提供的长臂复合驱动六自由度并联机构中变形虎克铰的短轴结构示意图。
具体实施方式
24.下面结合附图对本发明提供的长臂复合驱动六自由度并联机构进行详细说明。
25.如图1至图7所示,本发明提供的长臂复合驱动六自由度并联机构包括基座1、近端驱动器2和远端执行器3;
26.其中,所述基座1包括三个第一铰接支座101、三个第二铰接支座102和底板103;三个第一铰接支座101按照中心对称方式安装在底板103的顶面外侧部位;三个第二铰接支座102按照中心对称方式安装在底板103的顶面内侧部位;第一铰接支座101和第二铰接支座102的顶面为相对于底板103的顶面呈倾斜状态的倾斜面,每一个第一铰接支座101和一个第二铰接支座102为一对且关于对称点104中心对称,三个对称点104组成正三角形,且正三角形的中心与底板103的中心重合;
27.所述近端驱动器2包括结构相同且分别安装在一对第一铰接支座101和第二铰接支座102的第一支链i、第二支链ii和第三支链iii;每个支链包括电机4、伸缩缸5、底座6和
变形虎克铰7;两个底座6的下端分别铰接在第一铰接支座101和第二铰接支座102上,由此分别组成第一转动副11和第二转动副12,并且第一转动副11的转动轴线与第一铰接支座101的倾斜面平行,第二转动副12的转动轴线与第二铰接支座102的倾斜面平行;每个底座6上同时安装一台电机4和一个伸缩缸5,电机4的输出端与伸缩缸5上的推杆内端相连接;变形虎克铰7包括一根长轴701和一根短轴702;其中长轴701包括中间圆轴703和两根半长轴704,两根半长轴704的一端分别连接在中间圆轴703的两端且两根半长轴704的轴线间具有夹度;短轴702包括轴座707和两根半短轴706,两根半短轴706的一端分别连接在轴座707的两侧面上,并且轴座707中部沿垂直于半短轴706的轴线方向形成有一个中心圆孔705,中心圆孔705以转动的方式套在长轴701的中间圆轴703上而组成第五转动副15;两根半长轴704分别铰接在两个伸缩缸5上的推杆外端,由此分别组成第三转动副13和第四转动副14,两根半长轴704的轴线分别与第一转动副11和第二转动副12的转动轴线平行;
28.所述远端执行器3包括长臂操纵杆8、球铰9和动平台10;其中三根长臂操纵杆8的上端分别通过一个球铰9按照中心对称方式间隔连接在动平台10的底面上,下端分别与三个支链上的短轴702铰接而组成第六转动副16,并且第六转动副16的转动轴线与短轴702的轴线重合。
29.所述底板103为正三角形板状结构;第一铰接支座101与第二铰接支座102的结构相同。
30.所述变形虎克铰7上两根半长轴704的轴线间夹度为150
°
。
31.所述长臂操纵杆8采用刚性长杆。
32.所述动平台10为正三角形板状结构。
33.现以底板1的顶面垂直方向作为z轴方向,前端边缘作为y轴方向,x轴方向由右手法则确定,对本发明提供的长臂复合驱动六自由度并联机构的工作原理阐述如下:
34.当利用本长臂复合驱动六自由度并联机构进行飞机蒙皮的打磨时,首先驱动六个电机4,并以六个伸缩缸5作为主动副,由此驱动长臂操纵杆8一端的两个移动自由度,长臂操纵杆8将绕变形虎克铰7的两条转动轴线转动,使得长臂操纵杆8另一端具有三个移动自由度,同时动平台10通过球铰9连接长臂操纵杆8,使动平台10获得3个转动自由度和3个移动自由度,三条支链结构相同,各提供2个控制参数,共6个控制参数来控制动平台10的六个自由度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。