1.本技术属于机械部件技术领域,特别是涉及一种两转两移并联机构。
背景技术:
2.并联机构为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
3.近年来,随着并联机构相关理论研究的不断深入和应用领域的不断拓展,少自由度并联机构已成为该领域的研究热点。少自由度并联机构具有精度高、速度快、刚度高、位置累积误差小等优点。在机械加工、医疗器械、空间技术、传感器等领域制越来越受到产业界和学术界的重视,其中大多数的研究针对的是具有3r2t,2r3t,3r1t,1r3t,3r,3t,2r1t和2t1r其中,r代表转动副,t代表移动副运动的并联机构,对于具有2r2t运动的并联机构的设计和分析的相关文献较少,但是,2r2t并联机构在4轴并联机床,农业和采矿业中振动筛,脚踝康复及其他医疗领域具有潜在的应用前景。
技术实现要素:
4.1.要解决的技术问题
5.基于当前对于具有2r2t运动的并联机构的设计和分析的相关文献较少,但是,2r2t并联机构在4轴并联机床,农业和采矿业中振动筛,脚踝康复及其他医疗领域具有潜在的应用前景,本技术提供了一种两转两移并联机构。
6.2.技术方案
7.为了达到上述的目的,本技术提供了一种两转两移并联机构,包括相互连接的支链机构和连接机构,所述连接机构包括依次排列的固定基座、支臂连接板和运动平台,所述支链机构包括第一支链、第二支链、第三支链和第四支链;所述第一支链一端与所述固定基座连接,所述第一支链另一端与所述运动平台连接,所述第一支链与所述支臂连接板连接,所述第二支链一端与所述固定基座连接,所述第二支链另一端与所述支臂连接板连接,所述第三支链一端与所述固定基座连接,所述第三支链另一端与所述运动平台连接,所述第四支链一端与所述固定基座连接,所述第四支链另一端与所述运动平台连接。
8.本技术提供的另一种实施方式为:所述第一支链与所述固定基座连接于第一连接点,所述第三支链与所述固定基座连接于第二连接点,所述第四支链与所述固定基座连接于第三连接点,所述第一连接点、所述第二连接点与所述第三连接点为等腰直角三角形的三个顶点。
9.本技术提供的另一种实施方式为:所述第一支链与所述运动平台连接于第四连接点,所述第三支链与所述运动平台连接于第五连接点,所述第四支链与所述运动平台连接于第六连接点,所述第四连接点、第五连接点与所述第六连接点为等腰直角三角形的三个顶点。
10.本技术提供的另一种实施方式为:所述第一支链通过第一转动关节组件与所述固
定基座连接,所述第一支链通过第一万向节组件与所述运动平台连接。
11.本技术提供的另一种实施方式为:所述第二支链通过第二转动关节组件与所述固定基座连接,所述第二支链通过第三转动关节组件与所述支臂连接板连接。
12.本技术提供的另一种实施方式为:所述第三支链通过第二万向节组件与所述固定基座连接,所述第三支链通过第一球关节组件与所述运动平台连接。
13.本技术提供的另一种实施方式为:所述第四支链通过第三万向节组件与所述固定基座连接,所述第四支链通过第二球关节组件与所述运动平台连接。
14.本技术提供的另一种实施方式为:所述第一支链包括依次连接的光杠、端盖、光轴座和减速箱组件,所述减速箱组件与伺服电机连接,所述光杠与所述第一万向节组件连接,所述减速箱组件与所述第一转动关节组件连接。
15.本技术提供的另一种实施方式为:所述光杠、定位圈、螺母、丝杠与所述减速箱组件依次连接,所述定位圈设置于所述光杠外侧,所述螺母设置于所述丝杠外侧。
16.本技术提供的另一种实施方式为:所述光杠、所述光轴座与所述减速箱组件形成移动副。
17.3.有益效果
18.与现有技术相比,本技术提供的两转两移并联机构的有益效果在于:
19.本技术提供的两转两移并联机构,为一种可实现两维转动两维平动的新型并联机构。
20.本技术提供的两转两移并联机构,摒弃传统的并联机构所有支链与运动平台直接连接的构型,采用了部分支链连接在其他支链上形成闭环,使得闭环内的支链实现移动解耦,进而使机构从一个强耦合构型进化为弱耦合的两维转动两维平动机构。
21.本技术提供的两转两移并联机构,可以实现前进、水平方向的移动及水平、竖直方向的摆动,而且主支链与短支链形成闭环结构可以使短支链与运动平台的前进方向运动实现解耦,从而使本机构成为弱耦合的两转两移并联机构。
附图说明
22.图1是本技术的两转两移并联机构结构示意图;
23.图2是本技术的两转两移并联机构结构第一局部结构示意图;
24.图3是本技术的第一万向节组件结构示意图;
25.图4是本技术的第一转动关节组件结构示意图;
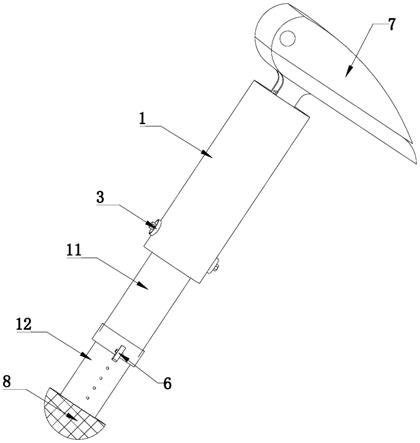
26.图5是本技术的第一支链局部结构示意图;
27.图6是本技术的两转两移并联机构结构第二局部结构示意图;
28.图7是本技术的两转两移并联机构结构第三局部结构示意图;
29.图8是本技术的两转两移并联机构结构第四部结构示意图;
30.图9是本技术的第二万向节组件结构示意图。
具体实施方式
31.在下文中,将参考附图对本技术的具体实施例进行详细地描述,依照这些详细的描述,所属领域技术人员能够清楚地理解本技术,并能够实施本技术。在不违背本技术原理
的情况下,各个不同的实施例中的特征可以进行组合以获得新的实施方式,或者替代某些实施例中的某些特征,获得其它优选的实施方式。
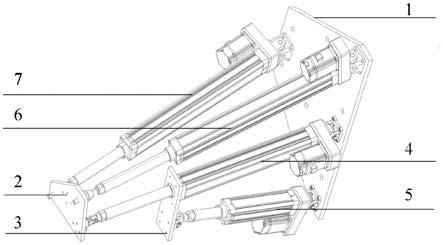
32.参见图1~9,本技术提供一种两转两移并联机构,包括相互连接的支链机构和连接机构,所述连接机构包括依次排列的固定基座1、支臂连接板3和运动平台2,所述支链机构包括第一支链、第二支链、第三支链和第四支链;所述第一支链一端与所述固定基座1连接,所述第一支链另一端与所述运动平台2连接,所述第一支链与所述支臂连接板3连接,所述第二支链一端与所述固定基座1连接,所述第二支链另一端与所述支臂连接板3连接,所述第三支链一端与所述固定基座1连接,所述第三支链另一端与所述运动平台2连接,所述第四支链一端与所述固定基座1连接,所述第四支链另一端与所述运动平台2连接。
33.进一步地,所述第一支链与所述固定基座1连接于第一连接点,所述第三支链与所述固定基座1连接于第二连接点,所述第四支链与所述固定基座1连接于第三连接点,所述第一连接点、所述第二连接点与所述第三连接点为等腰直角三角形的三个顶点;所述第一支链与所述运动平台2连接于第四连接点,所述第三支链与所述运动平台2连接于第五连接点,所述第四支链与所述运动平台2连接于第六连接点,所述第四连接点、第五连接点与所述第六连接点为等腰直角三角形的三个顶点。
34.进一步地,所述第一支链通过第一转动关节组件81与所述固定基座1连接,所述第一支链通过第一万向节组件11与所述运动平台2连接。所述第二支链通过第二转动关节组件83与所述固定基座1连接,所述第二支链通过第三转动关节组件84与所述支臂连接板3连接。所述第三支链通过第二万向节组件101与所述固定基座连接,所述第三支链通过第一球关节组件91与所述运动平台2连接。所述第四支链通过第三万向节组件102与所述固定基座1连接,所述第四支链通过第二球关节组件92与所述运动平台2连接。所述第三支链、第四支链与连接两端的关节组件形成无约束的ups支链,第一支链与其两端的关节组件形成2r2t的少约束支链,其约束类型决定了整个并联机构的自由度类型,第二支链连接第一支链上二者形成闭环实现移动解耦。
35.具体的,这里的第一支链、第二支链、第三支链和第四支链的结构相同,即他们的组成部件与部件之间的连接关系相同,但是为了区分,这里的第一支链为主支链4,第二支链为短支链5,第三支链为第一副支链6,第四支链为第二副支链7。所述主支链4始端通过第一转动关节组件81连接在固定基座1等腰直角三角形的底边与高线的交点,末端通第一万向节组件11连接在动平台2的顶点;所述短支链5位于主支链4的正下方,始端通过第二转动关节组件83连接在固定基座1等边三角形的下端点,末端通过第三转动关节组件84与支臂连接板3连接,支臂连接板3连接在主支链4光轴座的端盖48上;所述第一副支链6位于主支链4的正上方,始端通过第二万向节组件82连接在固定基座1等边三角形上端点,末端通过第一球关节组件91连接在运动平台2的上端点;所述第二副支链7位于主支链4的右侧,始端通过第三万向节组件10连接在固定基座1等边三角形顶点,末端通过第二球关节组件92连接在运动平台2的右端点。
36.进一步地,所述第一支链包括依次连接的光杠47、端盖48、光轴座42和减速箱组件43,所述减速箱组件43与伺服电机41连接,所述光杠47与所述第一万向节组件11连接,所述减速箱组件43与所述第一转动关节组件81连接。所述光杠47、定位圈46、螺母45、丝杠44与所述减速箱组件43依次连接,所述定位圈46设置于所述光杠47外侧,所述螺母45设置于所
述丝杠44外侧。
37.具体的,伺服电机41通过螺钉固定在减速箱端盖432上,伺服电机41的输出轴与小轮434固连,小轮434通过皮带435与大轮433形成带传动,大轮433与轮轴436通过紧定螺钉固连;所述的轴承座438通过螺钉在减速箱端盖432与光轴座42之间,并套在轮轴436外,轴承座438、轮轴436之间安装轴承437,轮轴436、轴承437、轴承座438三者同轴心,同时通过固定轴承座438一端的轴承座螺母439限制轴承437的轴向移动使其固定;所述的丝杠44通过螺钉与轮轴436固定连接,二者同轴心,丝杠外套螺母45,并通过定位圈46实现螺母45与光杆47固定连接;所述的端盖48套在光杠47外侧并通过螺钉固定在光轴座42一端,使光轴座42封住内部的定位圈46、螺母45与丝杠44,如此一来光杠47便与光轴座42、减速箱组件43形成移动副;所述的减速箱外壳431通过螺钉与减速箱端盖432固连,封装大轮433、小轮434、皮带435、轮轴436;所述减速箱外壳431通过转动关节组件81连接在固定基座1等边三角形的底边与高线的交点。
38.第一转动关节组件81由双耳座811、单耳座812、短轴813组成,双耳座811通过螺钉固定在固定基座1等边三角形的底边与高线的交点上,单耳座812通过螺钉固定减速箱外壳431上;短轴813通过卡簧连接两个构件形成转动关节。第一万向节组件11由轴端联轴器111、轴端联轴器112、主支链1十字轴113、第一万向节连接件114组成,轴端联轴器111与光杠47固定连接,主支链1万向节连接件114通过螺钉固定在运动平台的顶点,轴端联轴器112与主支链1万向节连接件114通过螺钉固定,轴端联轴器111、轴端联轴器112通过主支链1十字轴113连接形成万向节。
39.第二转动关节组件83与第一转动关节组件相同,只是双耳座通过螺钉固定在固定基座1等边三角形下端点。
40.第三转动关节组件84与第一转动关节组件相同,只是双耳座通过螺钉固定在支臂连接板3下方,单耳座在固定光杠上。
41.第一球关节组件91由球座911、球头912组成,球座911通过螺纹与光杠连接,球头912固定在运动平台2的顶点。第二球关节组件92与第一球关节组件91结构相同,涉及的连接关系也相同。
42.第二万向节组件101由万向节双耳座1011、万向节单耳座1012、十字轴1013组成,第二万向节双耳座1011通过螺钉固定在固定基座1等边三角形上端点,万向节单耳座1012通过螺钉固定在通过螺钉固定减速箱外壳上,二者通过十字轴1013连接形成万向节。
43.第三万向节组件102与第二万向节组件相同,只是万向节双耳座通过螺钉固定在固定基座1等边三角形的顶点。
44.主支链4的短轴813、短支链5的短轴相互平行且均与固定基座1等腰直角三角形的高线平行;与固定基座1固定的万向节双耳座1011、第三万向节组件的万向节双耳座的通孔轴线与短轴813始终共线,主支链4上轴端联轴器111的通孔轴线与短轴813始终垂直。
45.本技术的两转两移并联机构应用于农业和采矿业中振动筛,脚踝康复及其他医疗领域。
46.尽管在上文中参考特定的实施例对本技术进行了描述,但是所属领域技术人员应当理解,在本技术公开的原理和范围内,可以针对本技术公开的配置和细节做出许多修改。本技术的保护范围由所附的权利要求来确定,并且权利要求意在涵盖权利要求中技术特征
的等同物文字意义或范围所包含的全部修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。