1.本发明属于机械结构设计技术领域,具体涉及一种全电飞行器上位锁。
背景技术:
2.通常,带有可收放起落架的飞行器设置有上位锁,上位锁在起落架收起后将起落保持在收上位置。在飞机着陆时上位锁开锁,使起落架舱门和支柱能够顺利放下。如果上位锁因故障而不能开锁,则会影响飞机的安全着陆,所以飞机的上位锁上需配备第二个余度的开锁措施。
3.传统飞机起落架上位锁一般都是采用液压驱动装置或气压驱动装置,采用液压驱动或气压驱动实现上位锁锁定、开锁功能。近些年,适应飞机起落架的全电化趋势,需要结构紧凑、重量轻、系统可靠度高的起落架上位锁。
4.专利us006802476公开了一种电作动的双余度上位锁,其第一余度由电机驱动,第二余度由电磁铁驱动,两个余度均可驱动止动连杆实现锁钩的解锁。
5.其开锁组件和开锁组件与止动连杆的转动轴不共轴。
6.其将作动装置的两个余度分置在止动连杆的两侧,使其产生绕转轴的同向运动,原理上决定了结构不够紧凑,空间需求大,难以小型化;
7.基于相同的原理,其开锁摇臂必须设计的较短以节省空间,导致其电磁铁驱动余度力臂杠杆比增加需占用较大空间,电磁铁开锁力矩需求较大,因此锁的重量较大。
8.其锁钩和止动连杆间为线接触,当其锁钩和止动连杆间配合面磨损过大时可能发生自锁,导致双余度解锁失效,因而维护要求高。
技术实现要素:
9.本发明的目的:本发明寻求减轻上述问题中的一个或多个问题,替代性或附加的,本发明寻求提供一种全电飞行器上位锁,提供一种轻重量高可靠的上位锁解锁方案。
10.本发明的技术方案:
11.一种全电飞行器上位锁,包括:第一开锁组件、锁体、锁钩、止动摇臂、第一轴、第二轴、第一扭簧、第二扭簧;
12.所述锁钩通过第一轴与锁体铰接,止动摇臂通过第二轴与锁体铰接,锁环位于锁钩的钩口内;
13.第一扭簧套设在第一轴上,第一扭簧一端与锁体连接,另一端与锁钩连接;所述第一扭簧用于驱动锁钩顺时针转动;第二扭簧套设在第二轴上,第二扭簧一端与锁体连接,另一端与止动摇臂连接;所述第二扭簧用于驱动止动摇臂逆时针转动;
14.所述第一开锁组件的输出轴与第二轴固定连接,第一开锁组件通过第二轴驱动止动摇臂转动;
15.所述止动摇臂上设置有第一圆弧面与锁钩上的第二圆弧面配合以限制锁钩顺时针转动。
16.进一步,所述锁体上设有第一止动结构,锁钩上设有第一止动面,所述第一止动面与第一止动结构贴合时限制锁钩逆时针转动。
17.进一步,所述锁体上设有第二止动结构,止动摇臂上设有第二止动面,当第二止动面与第二止动结构贴合时限制止动摇臂逆时针转动。
18.进一步,止动摇臂设有第一通孔,所述第二轴穿过第一通孔;
19.所述第一通孔侧壁沿轴向设有凹槽;所述第二轴外表面沿轴向设有凸台;凹槽宽度不小于止动摇臂的旋转角度;
20.第二轴通过凸台与凹槽配合以驱动止动摇臂转动。
21.进一步,所述锁钩上设有第三圆弧面,止动摇臂上设有第四圆弧面;
22.锁钩通过第三圆弧面与第四圆弧面配合以限制止动摇臂逆时针转动。
23.进一步,所述锁还包括:到位开关;
24.当止动摇臂上的第二止动面与锁体第二止动结构贴合时,止动摇臂按压到位开关,接通上锁到位信号。
25.进一步,所述锁还包括:角度传感器;所述角度传感器设置在第一解锁组件上,所述角度传感器用于监测第二轴的旋转角度。
26.进一步,所述锁还包括:第二解锁组件;
27.所述第二开锁组件固定在锁体上,第二开锁组件的活塞杆推动止动摇臂顺时针转动,使得止动摇臂上的第一圆弧面与锁钩上的第二圆弧面脱开,解除对锁钩顺时针转动的限制,锁钩解锁。
28.本发明的有益效果:
29.本发明上位锁与现有技术相比具有以下优点和积极效果:
30.第一,实现了上位锁的双余度电动解锁,提升了系统的可靠性。
31.第二,通过制造成本低,电机驱动力矩需求小,可有效降低锁的重量。
附图说明
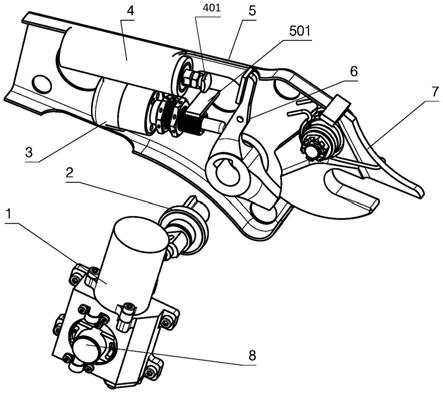
32.图1是本发明的全电上位锁结构示意图;
33.图2是锁体锁钩和止动摇臂示意图;
34.图3是止动摇臂和第二轴连接示意图;
35.图4是上锁状态开锁组件1和开锁组件2与摇臂组件的配合关系示意图;
36.图5是解锁状态开锁组件1和开锁组件2与摇臂组件的配合关系示意图;
37.图6是上锁状态止动摇臂与锁钩的止动示意图;
38.图7是开锁状态止动摇臂与锁钩的止动示意图;
39.图8是第一开锁组件示意图。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.本发明提供一种双余度全电上位锁,如图1所示,包括:第一开锁组件1、第二轴2、到位开关3、第二开锁组件4、锁体5、止动摇臂组件6、锁钩7、角度传感器8、第一轴9等构成。
42.首先结合图2-图7对全电上位锁的机械原理进行说明,锁环8位于锁钩7的钩口内,锁钩7与锁体5间通过第一轴9形成铰接,在锁钩的上的第一止动面701与锁体上的第二止动结构502贴合,以阻止锁钩7逆时针转动。止动摇臂6与锁体5间通过第二轴2形成铰接;锁钩7上设有第一扭簧,扭簧一端与锁体5连接,扭簧另一端与锁钩7连接,使锁钩7产生逆时针旋转的回复力;止动摇臂6设有第二扭簧11,当止动摇臂6转动至其第二止动面602与锁体上的第一止动结构501贴合时停止旋转;止动摇臂6上的第一圆弧面601与锁钩上的第二圆弧面702贴合,实现锁钩7顺时针旋转自由度的锁定。
43.第一开锁组件1的输出轴为旋转运动,第一开锁组件1的输出轴与第二轴2间固定连接。止动摇臂上设有弧形凹槽604,凹槽604与轴2上的凸台201配合。开锁时,当第二轴2受开锁组件1的驱动顺时针旋转时,凸台201的第一平面2011与止动摇臂6的凹槽平面6041贴合,驱动止动摇臂6瞬时针转动,转动至第一圆弧面601与第二圆弧面702脱开后,锁钩7瞬时针旋转的止动被解除,在第二扭簧11的作用下打开至开锁位置,锁钩上的第三圆弧面704对止动摇臂形成逆时针旋转的止动。
44.第二轴2在开锁组件1的反向驱动下至初始位置,凸台201的第一平面2011与止动摇臂6的凹槽平面6041间产生间隙,以允许止动摇臂6在第二扭簧的作用下缩回,做好下一次上锁的准备。
45.上锁时,锁钩4受锁环撞击,克服第一扭簧11的作用力逆时针旋转,第一止动面701与第二止动结构502贴合,同时解除了对止动摇臂6逆时针旋转的止动,止动摇臂6在扭簧的作用下逆时针旋转至与第一止动结构501贴合,此时第一圆弧面601与第二圆弧面702配合,再次实现对锁钩7瞬时针旋转的止动。止动摇臂6按压到位开关3使到位开关接通给出到位信号。
46.角度传感器8用于监测轴2的旋转角度。
47.第二开锁组件4与锁体5间通过螺栓固定连接,当开第一锁组件1故障时,第二开锁组件4的活塞杆401伸出,推动止动摇臂6瞬时针旋转至第一圆弧面601与第二圆弧面702脱开后,锁钩7瞬时针旋转的止动被解除。从而产生第二余度的解锁。
48.图8作为一种优选实施例,开锁组件1为一种旋转输出机构,可由电机101、一级减速齿轮传动102、二级减速传动蜗杆103、涡轮104组成。
49.作为一种适应开锁摇臂有限转角的优选实施例,涡轮设计为扇形面,从而减轻传动机构的重量。
50.作为一种优选实施例,开锁组件2直线输出机构,可由电机驱动滚珠丝杠或火工品气体发生器等驱动的直线作动筒,此作动筒为行业一般应用,不再赘述。
51.以上所述,仅为本发明的具体实施例,对本发明进行详细描述,未详尽部分为常规技术。但本发明的保护范围不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。