1.本发明涉及空压机技术领域,具体涉及一种空压机节能优化方法。
背景技术:
2.空气压缩机是一种用以压缩气体的设备,空气压缩机与水泵构造类似,是很多制造型工厂里必备的公辅设备,工厂在压缩空气时通常是不稳定的,导致空压机频繁地进行加载和卸载工作,不仅造成资源浪费,同时也造成设备损耗,因此空压机的优化运行是很多企业重点关注的工作,尤其是空压机节能优化运行。随着能源危机的到来,空压机节能优化技术研究亟需发展,而现有技术的空压机优化方法需要人工操作,对工作人员的人身安全造成潜在威胁,并且由于空压机异常状态处理效率低,不能及时对空压机异常状态做出有效处理,造成能源损耗,不利于节能环保。例如,中国专利号cn111734614a公开了一种空压机系统运行优化方法及装置,该发明虽然能够避免空压机频繁加载和卸载,减少整个系统的能耗浪费,但是需要工作人员人工对空压机进行查看与调整,降低工作人员数据收集效率,进而降低空压机异常状态处理效率,同时对工作人员的人身安全造成潜在威胁。此外,现有的基于无人机巡检的空压机节能方法,无法及时对异常数据做出反馈,降低异常运行状态的处理速率,造成能源浪费,不利于节能环保。
技术实现要素:
3.本发明主要是为了解决现有技术的空压机节能优化方法安全性和时效性差的问题,提供了一种空压机节能优化方法,采用无人机收集空压机的运行数据,并根据运行数据检测空压机的运行状态,当空压机处于异常状态时,优化调整空压机的plc程序,避免由于空压机频繁地进行加载和卸载工作造成资源浪费,提升能效;通过无人机巡检避免人工操作,保证工作人员的人身安全,同时提高空压机异常状态的处理效率,避免由于不能及时对空压机异常状态做出处理造成能源损耗,节能环保。
4.为了实现上述目的,本发明采用以下技术方案:
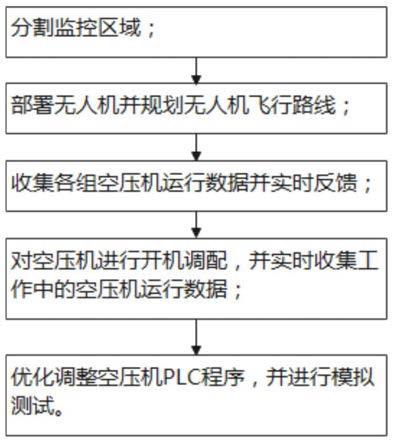
5.一种空压机节能优化方法,包括以下步骤:步骤s1)分割监控区域;步骤s2)部署无人机并规划无人机飞行路线;步骤s3)收集各组空压机运行数据并实时反馈;步骤s4)对空压机进行开机调配,并实时收集工作中的空压机运行数据;步骤s5)优化调整空压机plc程序,并进行模拟测试。本发明提供了一种空压机节能优化方法,采用无人机收集空压机的运行数据,并根据运行数据检测空压机的运行状态,当空压机处于异常状态时,优化调整空压机的plc程序,实现空压机的节能优化,具体过程为:(1)分割监控区域:工作人员将无人机与计算机通信连接,同时通过计算机向无人机发送环境数据,无人机根据环境数据构建全景模型;工作人员控制无人机进行区域信息采集,无人机根据区域信息生成对比模型;将对比模型与全景模型进行对比,分割监控区域,并将分割后的各区域标记为a1、a2、
…
、a
n-1
、an,n为自然数;根据对比模型和全景模型,生成各区域对应的监控模型;
(2)部署无人机并规划无人机飞行路线:工作人员部署若干组无人机至a
1-an区域,并根据各区域监控模型中标注的各组空压机位置,按照耗时最短原则规划飞行路线;(3)收集各组空压机运行数据并实时反馈:工作人员启动无人机,无人机依据规划的飞行路线,对各组空压机进行巡检,并实时收集对应区域内各组空压机的运行数据,然后对运行数据进行分类处理,并自动生成巡检记录表;(4)对空压机进行开机调配,并实时收集工作中的空压机运行数据:无人机依据各组空压机的运行数据,对空压机的开机组合进行调配,并实时收集工作中的空压机运行数据,根据收集到的数据对调配方案进行优化修改;(5)优化调整空压机plc程序,并进行模拟测试:无人机与空压机的plc控制器通信连接,将plc控制器中存储的plc程序进行调整标注,并将调整方案通过计算机反馈给工作人员;计算机依据调整方案进行模拟测试,记录模拟测试中各组空压机的运行数据,并将运行数据与巡检记录表中的数据进行对比,生成优化日志。
6.本发明相较于以往的人工控制空压机优化运行方案而言,通过无人机巡检监控区域内的各组空压机,无人机的终端模块接收工作人员上传的环境数据,并依据环境数据构建监控区域全景模型;各组无人机依据采集到的区域信息构建对比模型;将对比模型与全景模型进行对比,分割监控区域并标记分割后的各个区域;根据对比模型和全景模型,生成各区域的监控模型;工作人员部署若干组无人机至各区域,根据监控模型中标注的各组空压机位置,按照耗时最短原则规划飞行路线。本发明能够自主规划巡检区域,提高无人机巡检效率;且自行规划耗时最短的飞行路线,提高工作人员数据收集效率,进而提高空压机异常状态处理效率,避免造成能源浪费。
7.无人机依据调配方案对空压机进行开机调配,并收集运行中的空压机的运行数据,同时自行生成运行记录表,将收集到的各项运行数据录入运行记录表中;分析空压机运行过程中的各项运行数据,并提取其中的变化异常数据,无人机收集异常数据出现时间以及空压机运行状态;依据空压机运行状态,对对应的plc程序进行程序定位标注,针对对应的plc程序自行生成调整方案。本发明能够及时对异常数据做出反馈,提高异常运行状态处理速率,避免由于不能及时处理空压机异常状态造成能源损耗,节能环保。同时,本方案通过优化调整空压机的plc程序,避免由于空压机频繁地进行加载和卸载工作造成资源浪费,提升能效。
8.作为优选,步骤s1的具体过程,包括以下步骤:步骤a1)工作人员上传环境数据至无人机的终端模块;步骤a2)无人机依据环境数据构建监控区域全景模型;步骤a3)无人机收集区域信息;步骤a4)无人机依据区域信息构建监控区域对比模型;步骤a5)将对比模型与全景模型进行对比,分割监控区域,并将分割后的各区域标记为a1、a2、
…
、a
n-1
、an,n为自然数;步骤a6)根据对比模型和全景模型,生成各区域对应的监控模型。无人机的终端模块接收工作人员上传的环境数据,并依据环境数据构建监控区域全景模型;各组无人机依据采集到的区域信息构建对比模型,将对比模型与全景模型进行对比,分割监控区域并生成各区域对应的监控模型。
9.作为优选,步骤s2中规划无人机飞行路线的具体过程,包括以下步骤:步骤b1)将各组空压机位置在对应区域监控模型中进行标注;步骤b2)各组无人机依据对应监控模型中空压机的位置,规划飞行路线;步骤b3)计算各组飞行路线耗时;步骤b4)选取耗时最短的
飞行路线并将选取的飞行路线反馈给工作人员;步骤b5)工作人员通过计算机手动调整无人机的飞行路线。将各组空压机位置在对应区域的监控模型中进行标注,各组无人机依据对应监控模型中空压机的位置,进行多组飞行路线规划;对各组飞行路线进行耗时计算,同时选取耗时最短的飞行路线,其具体计算公式如下:h=l
÷
s,其中,h代表飞行耗时,l代表路线总长,s代表无人机飞行速度;将选取的飞行路线反馈给工作人员,工作人员通过计算机对无人机的飞行路线进行手动调整。
10.作为优选,步骤s3的具体过程,包括以下步骤:步骤c1)各组无人机收集对应区域中运行的空压机的各项运行数据,并将数据按照温度、运行时间、空压机出口流量及空压机实时功率进行分类;步骤c2)各组无人机的数据计算模块计算对应空压机的能效;步骤c3)将各组无人机收集和计算获得的数据录入巡检记录表中,并将巡检记录表通过无线传输的方式发送至计算机。各组无人机收集对应区域中运行的空压机的各项运行数据,并将其按照温度、运行时间、空压机出口流量以及空压机实时功率进行分类;各组无人机数据计算模块对对应空压机的能效进行计算,其具体计算公式如下:n=m
÷
f,其中,n代表空压机能效,m代表空压机出口流量,f代表空压机实时功率;将各组数据录入巡检记录表中,并将巡检记录表通过无线传输的方式发送至计算机。
11.作为优选,步骤s4的具体过程,包括以下步骤:步骤d1)工作人员上传调配方案至无人机的终端模块;步骤d2)依据调配方案,对空压机开机组合进行调配;步骤d3)实时收集工作中的空压机的运行数据,并自动生成运行记录表;步骤d4)对运行记录表中影响空压机能效的数据进行特征分析并进行数据提取;步骤d5)构建深度神经网络模型,根据步骤d4提取的数据,通过深度神经网络模型对空压机的能效曲线进行拟合;步骤d6)验证拟合成的能效曲线的逻辑,依据验证结果对调配方案进行修改,同时将修改后的调配方案反馈给工作人员;步骤d7)依据修改后的调配方案运行空压机,同时将空压机的各项运行数据反馈给工作人员。各组空压机依据工作人员上传的调配方案进行相应的开机组合调配;无人机依据调配方案对运行中的空压机进行数据收集,并自行生成运行记录表,将收集到的各项数据录入运行记录表中;对影响空压机能效的数据进行特征分析,并对其进行数据提取;构建深度神经网络模型,并通过深度神经网络模型对空压机能效曲线进行拟合;对拟合完成的能效曲线逻辑进行验证,并依据验证结果对调配方案进行修改,同时将调配方案反馈给工作人员;依据修改后的调配方案运行空压机,将空压机各项运行数据反馈给工作人员。
12.作为优选,步骤s5中,优化调整空压机plc程序的具体过程,包括以下步骤)步骤e1)分析空压机的各项运行数据,提取其中的变化异常数据;步骤e2)无人机采集异常数据出现时间;步骤e3)依据空压机运行数据,对对应的plc程序进行程序定位标注;步骤e4)根据对应的plc程序,自动生成调整方案并反馈给工作人员。对空压机运行过程中的各项数据进行分析,并将其中变化异常的数据进行提取;无人机对异常数据出现时间以及空压机运行状态进行收集;依据空压机运行状态,对对应的plc程序进行程序定位标注;针对对应的plc程序自行生成调整方案,并将其反馈给工作人员。
13.作为优选,步骤s5中,模拟测试的具体过程为:计算机依据调整方案进行模拟测试,同时记录模拟测试中各组空压机运行数据,并将运行数据与巡检记录表中的数据进行对比,生成优化日志。
14.作为优选,计算各组路线耗时的公式为:
h=l
÷
s其中,h表示无人机飞行耗时,l表示路线总长,s表示无人机飞行速度。
15.作为优选,计算空压机能效的公式为:n=m
÷
f其中,n表示空压机能效,m表示空压机出口流量,f表示空压机实时功率。
16.因此,本发明的优点是:(1)当空压机处于异常状态时,优化调整空压机的plc程序,避免由于空压机频繁地进行加载和卸载工作造成资源浪费,提升能效,实现空压机的节能优化;(2)通过无人机巡检避免人工操作,保证工作人员的人身安全;同时提高空压机异常状态的处理效率,避免由于不能及时对空压机异常状态做出处理造成能源损耗,节能环保。
附图说明
17.图1是本发明的流程图。
具体实施方式
18.下面结合附图与具体实施方式对本发明做进一步的描述。
19.如图1所示,一种空压机节能优化方法,包括以下步骤:步骤s1)分割监控区域;步骤s2)部署无人机并规划无人机飞行路线;步骤s3)收集各组空压机运行数据并实时反馈;步骤s4)对空压机进行开机调配,并实时收集工作中的空压机运行数据;步骤s5)优化调整空压机plc程序,并进行模拟测试。本发明提供了一种空压机节能优化方法,采用无人机收集空压机的运行数据,并根据运行数据检测空压机的运行状态,当空压机处于异常状态时,优化调整空压机的plc程序,实现空压机的节能优化,具体过程为:(1)分割监控区域:工作人员将无人机与计算机通信连接,同时通过计算机向无人机发送环境数据,无人机根据环境数据构建全景模型;工作人员控制无人机进行区域信息采集,无人机根据区域信息生成对比模型;将对比模型与全景模型进行对比,分割监控区域,并将分割后的各区域标记为a1、a2、
…
、a
n-1
、an,n为自然数;根据对比模型和全景模型,生成各区域对应的监控模型;(2)部署无人机并规划无人机飞行路线:工作人员部署若干组无人机至a
1-an区域,并根据各区域监控模型中标注的各组空压机位置,按照耗时最短原则规划飞行路线;(3)收集各组空压机运行数据并实时反馈:工作人员启动无人机,无人机依据规划的飞行路线,对各组空压机进行巡检,并实时收集对应区域内各组空压机的运行数据,然后对运行数据进行分类处理,并自动生成巡检记录表;(4)对空压机进行开机调配,并实时收集工作中的空压机运行数据:无人机依据各组空压机的运行数据,对空压机的开机组合进行调配,并实时收集工作中的空压机运行数据,根据收集到的数据对调配方案进行优化修改;(5)优化调整空压机plc程序,并进行模拟测试:无人机与空压机的plc控制器通信连接,将plc控制器中存储的plc程序进行调整标注,并将调整方案通过计算机反馈给工作人员;计算机依据调整方案进行模拟测试,记录模拟测试中各组空压机的运行数据,并将运
行数据与巡检记录表中的数据进行对比,生成优化日志。
20.步骤s1的具体过程,包括以下步骤:步骤a1)工作人员上传环境数据至无人机的终端模块;步骤a2)无人机依据环境数据构建监控区域全景模型;步骤a3)无人机收集区域信息;步骤a4)无人机依据区域信息构建监控区域对比模型;步骤a5)将对比模型与全景模型进行对比,分割监控区域,并将分割后的各区域标记为a1、a2、
…
、a
n-1
、an,n为自然数;步骤a6)根据对比模型和全景模型,生成各区域对应的监控模型。无人机的终端模块接收工作人员上传的环境数据,并依据环境数据构建监控区域全景模型;各组无人机依据采集到的区域信息构建对比模型,将对比模型与全景模型进行对比,分割监控区域并生成各区域对应的监控模型。
21.步骤s2中规划无人机飞行路线的具体过程,包括以下步骤:步骤b1)将各组空压机位置在对应区域监控模型中进行标注;步骤b2)各组无人机依据对应监控模型中空压机的位置,规划飞行路线;步骤b3)计算各组飞行路线耗时;步骤b4)选取耗时最短的飞行路线并将选取的飞行路线反馈给工作人员;步骤b5)工作人员通过计算机手动调整无人机的飞行路线。将各组空压机位置在对应区域的监控模型中进行标注,各组无人机依据对应监控模型中空压机的位置,进行多组飞行路线规划;对各组飞行路线进行耗时计算,同时选取耗时最短的飞行路线,其具体计算公式如下:h=l
÷
s,其中,h代表飞行耗时,l代表路线总长,s代表无人机飞行速度;将选取的飞行路线反馈给工作人员,工作人员通过计算机对无人机的飞行路线进行手动调整。
22.步骤s3的具体过程,包括以下步骤:步骤c1)各组无人机收集对应区域中运行的空压机的各项运行数据,并将数据按照温度、运行时间、空压机出口流量及空压机实时功率进行分类;步骤c2)各组无人机的数据计算模块计算对应空压机的能效;步骤c3)将各组无人机收集和计算获得的数据录入巡检记录表中,并将巡检记录表通过无线传输的方式发送至计算机。各组无人机收集对应区域中运行的空压机的各项运行数据,并将其按照温度、运行时间、空压机出口流量以及空压机实时功率进行分类;各组无人机数据计算模块对对应空压机的能效进行计算,其具体计算公式如下:n=m
÷
f,其中,n代表空压机能效,m代表空压机出口流量,f代表空压机实时功率;将各组数据录入巡检记录表中,并将巡检记录表通过无线传输的方式发送至计算机。
23.步骤s4的具体过程,包括以下步骤:步骤d1)工作人员上传调配方案至无人机的终端模块;步骤d2)依据调配方案,对空压机开机组合进行调配;步骤d3)实时收集工作中的空压机的运行数据,并自动生成运行记录表;步骤d4)对运行记录表中影响空压机能效的数据进行特征分析并进行数据提取;步骤d5)构建深度神经网络模型,根据步骤d4提取的数据,通过深度神经网络模型对空压机的能效曲线进行拟合;步骤d6)验证拟合成的能效曲线的逻辑,依据验证结果对调配方案进行修改,同时将修改后的调配方案反馈给工作人员;步骤d7)依据修改后的调配方案运行空压机,同时将空压机的各项运行数据反馈给工作人员。各组空压机依据工作人员上传的调配方案进行相应的开机组合调配;无人机依据调配方案对运行中的空压机进行数据收集,并自行生成运行记录表,将收集到的各项数据录入运行记录表中;对影响空压机能效的数据进行特征分析,并对其进行数据提取;构建深度神经网络模型,并通过深度神经网络模型对空压机能效曲线进行拟合;对拟合完成的能效曲线逻辑进行验证,并依据验证结果对调配方案进行修改,同时将调配方案反馈给工作人员;依据修
改后的调配方案运行空压机,将空压机各项运行数据反馈给工作人员。
24.步骤s5中,优化调整空压机plc程序的具体过程,包括以下步骤)步骤e1)分析空压机的各项运行数据,提取其中的变化异常数据;步骤e2)无人机采集异常数据出现时间;步骤e3)依据空压机运行数据,对对应的plc程序进行程序定位标注;步骤e4)根据对应的plc程序,自动生成调整方案并反馈给工作人员。对空压机运行过程中的各项数据进行分析,并将其中变化异常的数据进行提取;无人机对异常数据出现时间以及空压机运行状态进行收集;依据空压机运行状态,对对应的plc程序进行程序定位标注;针对对应的plc程序自行生成调整方案,并将其反馈给工作人员。
25.步骤s5中,模拟测试的具体过程为:计算机依据调整方案进行模拟测试,同时记录模拟测试中各组空压机运行数据,并将运行数据与巡检记录表中的数据进行对比,生成优化日志。
26.以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。