1.本发明涉及一种模拟开腔心脏手术和微创心脏病疗法的设备,包括所有传统和新的修复和植入疗法,涉及教育、培训、研究、新疗法开发和临床应用。本发明还涉及人体或动物体内其他器官和腔体的模拟、模拟器和假体。
背景技术:
2.几十年来,生物工程师一直试图预测、比较和优化心脏疗法结果。一种有效的方法是在体内或体外环境中预演疗法,包括开腔手术和微创疗法,例如经导管修复和植入。体外疗法模拟是在可控的机械系统中实践或发展疗法。以前的体外系统包括一个孤立的动物心脏或一个3d打印的人类心脏模型,而这项技术的最新发展带来了具有流体-固体结构相互作用的流体动力机械系统。尽管现有最先进的模拟器被认为接近人体结构和功能,但由于缺乏模拟的综合心脏功能,导致现有模拟器所进行的体外病因学研究往往不是最佳的,并且没有临床应用,例如临床预后。
3.本发明的实施例现在将仅通过示例的方式进行描述并附图,其中:
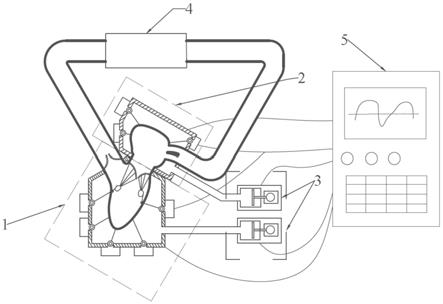
4.图1是包括心室模拟模块1、心房模拟模块2和泵3的预先存在的心脏模拟器的示意图。心室模拟模块1包括心室模型12并且心房模拟模块2包括心房模型22。心室模型12和心房模型22在一侧通过二尖瓣模型连接,另一侧通过调节室4连接。泵3控制和施加外部压力给心室模型12和心房模型22,以模拟心脏的跳动。该图示模拟器可模拟左心或右心(即心脏的左侧或右侧)。
5.图2是另一种现有心脏模拟器的示意图,该模拟器缺乏心室搏动功能。取而代之的是,在连接心房模型入血口和心室模型出血口的管道中,串联设置了调节室4和模拟血泵31。延伸到心室模拟模块1外部的臂112在模拟开始时固定乳头肌实体模型的位置以控制瓣膜的瓣叶的运动。
6.心脏瓣膜反流是最常见的瓣膜性心脏病。心脏瓣膜反流的一个主要原因是乳头肌异常移位。以前的研究人员已经证明,在体外模拟器中,乳头肌位置和心室几何形状中的任何一个都会对模拟结果产生影响。然而,目前的二尖瓣或三尖瓣结构的心脏模拟器无法模拟完整的心脏瓣膜功能,由于缺乏乳头肌位置调节功能或左心室的搏动功能,两者是迄今为止在心脏模拟器中不兼容的基本生理心脏功能。
7.现有模拟器中的这种技术限制是机械系统中两种功能不兼容的结果。臂112已经做得很小,以适应模拟模块1和2中有限的工作空间,并且不可能在不干扰左心室的生理跳动运动的情况下控制心室内的大范围乳头肌尖端位置。
8.虽然最近的一些模拟器已经模拟了左心室的跳动功能,但它们的模拟跳动只是模拟了心形气球的对称变形。事实上,人的左心室不是对称运动的,这样的模拟器不能模拟左心室的生理运动,也没有理想的准确性。
技术实现要素:
9.本发明寻求解决现有技术模拟器的缺点并提供模拟器中改进的乳头肌位置控制和左心室生理运动。
10.在本发明的模拟器中,左心室与周期性搏动运动同步地略微周期性地绕垂直的底尖轴(心底-心尖轴)旋转。此外,在本发明中,先前相互冲突的乳头肌调节和左心室搏动功能被结合在一个模拟器中。本发明使体外患者特异性预后更接近其临床应用,并使未来体外病原学研究的模拟环境更接近于真实人的生理状况。
11.根据本发明的第一方面,提供了一种模拟器,包括:腔室容器;设置在腔室容器内并模拟活体腔室的柔性腔室模型;至少一个腔臂设置在腔室容器内,腔臂的远端相对于模拟腔上的一点固定,远端的位置可从近端控制。控制装置,用于控制模拟活体腔室的运动,该控制装置适于在模拟期间改变远端的位置。
12.这种模拟器允许精确模拟活体腔室的运动,例如人心脏的左心室或右心室,在这种情况下,可以模拟搏动期间腔室的精确旋转和/或其他运动。
13.根据本发明的第二方面,提供了一种模拟器,包括:模拟活体腔室的柔性模拟腔,所述柔性模拟腔具有至少一个开口;包含瓣膜的瓣叶;乳头肌实体模型;连接乳头肌实体模型和瓣叶的腱索;至少一个瓣膜臂延伸穿过柔性模拟腔,使得瓣膜臂的远端设置在柔性模拟腔内,近端设置在柔性模拟腔外,瓣膜臂的远端相对于模拟乳头固定肌肉和瓣膜臂的远端的位置可从近端控制;以及用于控制模拟过程的控制装置。
14.尽管使用了柔性腔室,但这种模拟器允许精确控制乳头肌实体模型。
15.优选地,所述远端的位置可调节活体乳头肌实体模型收缩末期位置。
16.优选地,控制装置适于在模拟过程期间改变瓣膜臂远端的位置。
17.优选地,可以在不影响柔性模拟腔运动的情况下控制瓣膜臂远端的位置。
18.优选地,所述瓣膜臂包括:设置在柔性模拟腔内壁的第一旋转接头;朝向远端的第一固定装置,用于固定至乳头肌实体模型;以及在第一旋转接头和固定装置之间的第一可伸缩杆。
19.优选地,所述瓣膜臂还包括:朝向近端且设置在模拟腔外部的第二旋转接头;第二固定装置位于第一和第二旋转接头之间,用于固定到模拟腔;以及位于第二旋转接头和第二固定装置之间的第二可伸缩杆。
20.优选地,柔性模拟腔包括第一模拟腔和第二模拟腔,其中第一模拟腔和第二模拟腔通过开口连接,瓣膜位于它们之间。
21.优选地,所述模拟器还包括:腔室容器,所述腔室设置在所述腔室容器中。
22.优选地,所述瓣膜臂的近端固定在所述腔室容器的壁上;控制电机邻近腔室容器的壁设置并连接至近端;控制装置用于控制控制电机改变瓣膜臂远端的位置。
23.优选地,所述模拟器还包括:至少一个腔臂,设置在所述室容器内,所述腔臂的远端相对于所述模拟腔上的一点固定,并且所述远端的位置可从近端进行控制,控制装置适于在模拟流程期间改变腔臂的远端的位置。
24.在本发明的第一和第二方面中,优选地,腔臂的近端固定到腔室容器的壁上;相应的控制电机设置在腔室容器的壁附近并连接到近端;控制装置用于控制控制电机改变腔臂远端的位置。
25.优选地,所述腔臂包括:朝向近端的腔臂旋转接头;腔臂固定装置朝向远端以固定至模拟腔;以及位于所述腔臂旋转接头和所述腔臂固定装置之间的腔臂可伸缩杆。
26.优选地,腔臂固定装置包括布置在模拟腔的内外两侧上的用于夹紧模拟腔的夹板。
27.优选地,腔臂固定装置通过球窝接头附接到腔臂可伸缩杆。
28.优选地,每个旋转关节的位置由相应的关节控制线控制,并且所述或每个可伸缩杆的延伸由相应的延伸控制线控制。
29.优选地,模拟腔模拟左心室;控制装置用于控制腔臂远端的位置,使左心室在模拟过程中与心室的周期性搏动同步地绕心底-心尖轴旋转。
30.优选地,模拟器用于模拟左心和右心中的至少一个。
31.根据本发明的另一方面,提供了一种人造心脏瓣膜,包括:环;附在环上的瓣叶;腱索;和一个附接块;并且其中腱索的末端分别附接到瓣叶和附接块,瓣叶由第一材料形成,腱索由第二材料形成,附接块由第三材料形成,并且覆盖层是围绕第一、第二和第三材料模制并且由不同于第一、第二和第三材料的第四材料形成。
32.优选地,瓣膜还包括:多个瓣叶和多个附接块,其中每个附接块通过腱索连接到若干个瓣叶。
33.优选地,第一、第二和第三材料彼此不同。
34.优选地,第一材料是布材料。
35.优选地,第二材料是编织线。
36.优选地,第三材料是实心塑料。
37.优选地,第四材料是硅胶。
38.优选地,在模制覆盖层之前将第一、第二和第三材料缝合在一起。
39.优选地,所述瓣膜还包括:所述人工心脏瓣膜为二尖瓣。
40.优选地,人造心脏瓣膜是人用假体。
41.根据本发明的又一方面,提供一种制造根据前述方面的人造心脏瓣膜的方法,该方法包括:形成模具;将第一、第二和第三材料定位在模具中;用第四材料填充模具以形成围绕第一、第二和第三材料的覆盖材料。
42.优选地,该方法进一步包括:获得个体的相应瓣膜的扫描,用以形成模具并且将第一、第二和第三材料固定在模具中,使得腱索和附接块之间的连接点的位置和腱索和瓣叶之间的连接点的位置与扫描中的个体形态匹配。
43.根据本发明的又一方面,提供了一种用于模拟器的腔臂,该模拟器具有用于模拟活体的模拟腔。该臂包括:朝向远端的第一固定装置,用于固定到模拟腔的一部分;朝向近端的第一旋转接头;以及在第一旋转接头和第一固定装置之间的第一可伸缩杆,其中远端的位置可从近端控制。
44.优选地,腔臂还包括:壁固定装置,用于将腔臂的近端固定到包含模拟腔的腔室容器的壁上。
45.优选地,所述第一旋转关节的旋转由关节控制线控制,所述第一伸缩杆的伸出由伸展控制线控制。
46.优选地,所述腔臂还包括:位于近端的控制电机,所述控制电机可控地改变所述臂
的远端的位置。
47.优选地,固定装置包括布置在模拟腔腔壁的内外两侧上的用于夹紧模拟腔的夹板。
48.优选地,第一固定装置通过球窝接头附接到第一可伸缩杆。
49.根据本发明的又一方面,提供了一种瓣膜臂,包括:根据前述方面的腔臂;在第一固定装置和瓣膜臂的远端之间的第二可伸缩杆;朝向瓣膜臂远端的第二固定装置,用于固定在模拟腔中的乳头肌实体模型上;以及在第二可伸缩杆和第一固定装置之间的第二旋转接头。
50.优选地,所述第二旋转关节的旋转由各自的关节控制线控制,所述第二伸缩杆的伸展由各自的伸展控制线控制。
51.根据本发明的另一方面,提供了一种预测方法,所述预测方法用于预测对有症状的个体的器官进行的所提议的手术疗法的结果的方法,该方法包括:获得器官的扫描;基于扫描形成至少一个第一实体模型以模拟处于病症状态的器官;使用从有症状的患者的病例获得的第一实体模型和器官功能参数运行第一模拟以获得器官模型的第一疾病严重度指标;通过调整第一个模拟运行第二个模拟,直到第一个严重性指标与有症状的患者的医疗记录相匹配;在第二次模拟中进行建议的手术疗法并获得器官模型的第二次疾病严重程度指标;并且通过将第二疾病严重程度指标与处于健康或先前状况的患者的医疗记录进行比较来确定所提议的手术疗法的有效性。
52.优选地,该方法还包括:基于扫描形成至少一个对应的第二实体模型,用于模拟处于健康或先前状态的器官;在运行第一次模拟之前,使用从健康或先前状况的患者获得的第一实体模型和器官功能参数运行初始模拟以获得器官模型的初始疾病严重度指标;将初始疾病严重程度指标与患者健康或既往状况的医疗记录进行比较;调整初始模拟,直到初始疾病严重程度指标与患者在健康或先前状况下的病历相匹配;并且通过将匹配后的初始疾病严重程度指标与健康或先前状况的患者的医疗记录进行比较来确定该方法的可行性。
53.优选地,器官模型是心脏,第一实体模型和第二实体模型模拟左心或右心,或左心或右心的一部分,并且将第一模拟和第二模拟用来模拟左心或右心中至少一个的运动。
54.优选地,该手术疗法有效性评判包括在模拟休息状态和锻炼状态下疗法对器官的损伤。
55.优选地,该方法还包括:制作多个第一实体模型;为每个第一模型运行各自的第一和第二模拟;对各自的第二次模拟进行不同的手术疗法;并且基于各个第二疾病严重程度指标中的哪一个与健康或先前状况的患者的病历最匹配来确定不同的手术疗法中的哪一个最有效。
附图说明
56.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
57.图1是现有心脏模拟器的示意图,该模拟器缺少乳头肌控制功能。
58.图2是缺乏心室搏动功能的现有心脏模拟器的示意图。
59.图3是根据本发明的心脏模拟器的示意图。
60.图4显示了图3中的一部分图像,包括心室模拟模块1和心房模拟模块2。
61.图5显示了图4中的心室模拟模块1,着重描述二尖瓣模型15。
62.图6显示了图4中左心室模拟模块1的右下角,特别关注二尖瓣模型15,突出了臂13a、臂13b和前臂14之间的结构差异。
63.图7是专注于其与心腔容器11或21的壁和电机组110的连接方式的臂13a的3d图。
64.图8是说明臂13a的部件的示意图。
65.图9是图8中夹紧双板组件134的详细视图。
66.图10是臂13a的上半部的剖视图,着重描述控制机构并且为了便于说明省略了电机组110。
67.图11展示了带有可选的球窝接头139以连接夹紧双板组件134和杆133c的臂13c。
68.图12是图11中球窝接头139的详细剖视图。
69.图13是包括臂13b和前臂14的乳头肌控制臂111的3d图。
70.图14是说明前臂14的部件的示意图。
71.图15是前臂14的上半部的横截面图,重点是控制机构。
72.图16的内容与图6相同,重点强调乳头肌151如何连接到乳头肌支架111。
73.图17是臂13b的上半部分的横截面图,侧重点是控制机构。
74.图18显示了使用本发明的手术预后模拟流程。
具体实施方式
75.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
76.在本发明中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”、“中”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本发明及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。
77.并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本发明中的具体含义。
78.此外,术语“安装”、“设置”、“设有”、“连接”、“相连”应做广义理解。例如,可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或电连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
79.此外,术语“第一”、“第二”等主要是用于区分不同的装置、元件或组成部分(具体的种类和构造可能相同也可能不同),并非用于表明或暗示所指示装置、元件或组成部分的相对重要性和数量。除非另有说明,“多个”的含义为两个或两个以上。
80.下面将结合实施例和附图对本发明的技术方案作进一步的说明。
81.5.1概述
82.本发明提供了一种设备和方法,允许操作者(可以是但不限于外科医生、实习生、研究人员、新疗法开发者和任何医疗专业人员)使用包含真实大小器官模型的器官模拟器,模拟针对具有腔室结构的人体器官进行的开腔或微创疗法。器官模拟器能够模拟器官在健康、不健康、术前和术后条件下的患者特异性特性,包括几何形状和运动方式。
83.完整的疗法模拟流程包括多个按时间顺序排列的步骤:
84.·
制作具有从临床扫描中获得的患者特异性的几何形状的器官腔室模型。
85.·
模拟患者特异性的健康状况。
86.·
模拟患者特异性的症状(不健康状况)。
87.·
对有症状的器官模型进行疗法模拟。
88.·
模拟不健康器官模型的术后情况。
89.·
如果术后情况不令人满意,使用另一种或改进的疗法重复上述所有步骤,直到观察到最佳结果。
90.除临床应用外,本发明还可用于新疗法的开发、病原学研究、教育、培训和动物疾病治疗。当用于非临床应用时,模拟器官可以是用于动物的器官几何形状,或者是由cad修改的通用几何形状而不是患者特异性的几何形状,以更好地反映特定人群中的通用几何形状。
91.器官模型由组织等效材料制成,例如,一种柔性透明的硅胶材料,例如transil 40-1,将在其上进行疗法模拟。
92.这种器官模型通常可以是心脏模型,而模拟器可以经适当调整后模拟在其他类似腔室的身体器官(例如肺)中的疗法。在该文件中,作为示例,器官模型被假定为心脏,但本发明不限于此。
93.器官模拟器装置包括如下功能组件,如图3所示:模拟心室搏动的心室模拟模块1、模拟心房搏动的心房模拟模块2、驱动心室搏动的泵组3、调节系统4模拟人体循环系统的其他部分,数据系统5包括控制模拟器中所有电机的电机驱动系统和监控、处理和报告模拟器功能数据的数据采集系统,例如心率、血压、心输出量、反流分数、有效孔口面积和其他心脏性能指标。压力传感器和流量计也是数据系统5的一部分。
94.模拟模块1和2被设计为本发明的一部分,而模拟器的所有其他功能组件通常可以从流体动力学模拟平台获得,例如vivitro labs,inc.提供的vivitro pulse duplicator system,位于455boleskine road,加拿大不列颠哥伦比亚省维多利亚。本发明的块1和2与体外脉冲复制器系统完全兼容。
95.5.2详细说明
96.5.2.1腔室模拟模块1&2
97.人的心脏中有四个心腔,本发明的该实施例包括两个心腔模型。模拟器是模拟左心或右心。在心脏的左侧和右侧,每个心室腔顶部有一个心房腔,新房心室两腔之间的连接孔内有一个心脏瓣膜,使血液从心房单向流向心室,另一个心脏瓣膜在心室的血液出口孔中。在本实施例中,举例来说,假设模拟左心,因此,(按血流顺序列出)肺静脉、左心房、二尖瓣、左心室、主动脉瓣和主动脉被模拟。或者,当用于右心模拟时,每个左心模拟器组件也可
以模拟右心的相关组织和器官,包括上腔静脉、右心房、三尖瓣、右心室、肺动脉瓣和肺动脉。此外,本发明也可以比照使用,以模拟其他类似腔室的身体器官,例如肺。
98.现在参考图4,其显示了图3中的一部分图像,包括心室模拟模块1和心房模拟模块2。
99.左心室模拟模块1允许操作员在各种模拟状况设置下执行左心室模拟,包括具有不同健康状况的治疗前和治疗后的状况。
100.左心室模拟模块1的外壳是左心室容器11,它通常由透明塑料玻璃(如丙烯酸)制成,以便对内部组件进行清晰观察和粒子图像测速(piv,particle image velocimetry)研究。为了模拟开胸手术,例如与瓣环成形术相关的乳头肌修正术、乳头肌再定位手术和左心室形状重塑术,左心室容器11的每个板都可以根据操作者的需要进行拆卸,以留出方便的操作空间。为了模拟微创疗法,例如在心脏不停跳状态下进行的治疗二尖瓣反流症的经心尖介入性腱索植入术,左心室容器11的一些板可以被替换为具有专门设计的带有橡胶密封的孔的板,以允许插入医疗设备。左心室容器11中可以保留一些开口用于运动控制组件和泵3,这将在下面的内容中详细描述。
101.左心室模型12模拟真实左心室的运动。左心室模型12由具有与局部组织相似的物理特性的透明和柔性材料制成,例如硅胶和橡胶。可以修改左心室模型12的几何形状和属性以满足每个模拟的特定要求。例如,使用cad生成的几何图形作为特定人群的平均通用几何图形可用于研究该人群的病因,而单个患者特异性的几何图形可用于预后,并且可以将一些刚性塑料片嵌入左心室12的心室壁内以模拟局部组织的钙化。
102.左心室腔室模型12由液态材料浇铸制成,具有单独的具有左心室内壁几何形状的单独公模,或者包括公模和母模的多部件模具,其中多部件模具的母模需有左心室外表面几何形状。当需要通过厚度控制来调整特定区域的物理性能时,公模和母模都是必要的。模具可以由铣床或3d打印机制成。当需要患者特异性的几何图形时,需要进行mri(magnetic resonance imaging,核磁共振成像)等临床扫描以生成与模具制造机器兼容的格式的几何文件,例如“.stl”格式,否则,可以应用cad修改几何文件,从而调整几何文件的格式。
103.左心房容器21具有与左心室容器11相似或相同的结构、功能和材料,这两个容器之间的唯一区别(或主要区别)是容器所容纳的心脏腔室(左心室或左心房)。左心房模型22具有与左心室模型12相似或相同的制造工艺、功能和材料,只是这两个模型腔室模拟不同的心脏腔室。
104.在每个心动阶段,包括舒张期和收缩期,每个臂13a控制左心室实体模型12和左心房实体模型22的表面上的点的动态位置。在本说明书中,每个臂13a被称为“臂”,但很明显,其他类型的杆、圆柱体、臂或腿,无论是否连接,都可以用作臂13a。
105.此外,乳头肌控制臂111控制乳头肌151的动态位置。乳头肌控制臂111每个都包括上臂13b和前臂14。同样,本发明不限于使用上臂和前臂布置的实施方式,并且它对于技术人员来说显而易见的是,杆、气缸、臂和腿的其他元件,均可优选地互相连接以用于组成乳头肌控制臂111。
106.现在参考图6,它显示了图4中左心室模拟模块1的右下角,特别关注二尖瓣模型15,突出了臂13a、臂13b和前臂14之间的结构差异。
107.臂13a的运动由安装在心腔容器11或21(见图4)外表面上的电机组110控制,通过
臂13a内部的机械驱动系统。在心室容器11或21中,应用至少五个臂13a来模拟心室的生理运动,包括左心室围绕底尖轴的动态旋转。
108.臂13b是一种特殊类型的臂。除了臂13a的所有结构和功能之外,臂13b还能够控制连接到臂13b的上端的前臂14。与臂13a相比,在臂13b内部有更多的机械驱动系统,能够通过电机组110来控制前臂14的运动。臂13b和前臂14一起形成乳头肌控制臂111,其用于控制乳头肌151的运动,尤其是下面讨论的乳头肌尖端的动态位置,以此控制模拟乳头肌位移疾病的严重程度。从机械控制的角度来看,左心室容器11内的乳头肌尖端是独立控制的,不影响左心室容器11的运动,这是一个新颖的功能发明。
109.尽管仅示出了两个,但优选地在多用途心室模拟模块中存在三个乳头肌控制臂111,其可用作左心室模拟模块1或右心室模拟模块。在这种情况下,三个乳头肌控制臂111中的两个可用于模拟左心,其中两个乳头肌位于左心室中;并且所有三个乳头肌控制臂111可用于模拟右心,其中三个乳头肌位于右心室中。或者,可以分别为左心室和右心室提供具有适当数量和位置的乳头肌控制臂111的专门定制的模拟模块。
110.返回对本实施例的描述,左心房模拟模块2不包括乳头肌控制臂111。
111.二尖瓣模型15、主动脉瓣16主动脉17是现有模拟器的典型结构。在根据本发明的模拟器中,这三个部件15、16和17可以是预先存在的非患者特异性产品或固定了的分离动物组织,或者使用与心脏模型相同的材料和方法制造腔室12和22。二尖瓣模型15的铸造工艺可以被替换为升级工艺,这将在下面讨论并且是本发明的独特和新颖的特征。
112.泵3用于通过周期性地泵送填充到硅胶心室12和22及其容器11和21之间的空间中的介质液体18来驱动心室的搏动,而不是直接泵送位于心腔模型12和22内的模拟血液19。
113.5.2.2二尖瓣模型15
114.现在参考图5,其显示了图4中的心室模拟模块1,特别关注二尖瓣模型15。二尖瓣模型15安装在连接心腔模型12和22的孔口之间,并包括四个组件:乳头肌模型151、腱索模型152、瓣叶模型153和二尖瓣环模型154(为了方便,下文中这些部件有时省略“模型”二字)。每个乳头肌151由乳头肌支架111控制。二尖瓣环154安装在连接心脏模型的孔口之间腔室12和22。瓣叶153由二尖瓣环支撑,并且腱索152连接瓣叶153和乳头肌151。更具体地,腱索152在乳头肌尖端的表面上的相应点处连接到乳头肌151。尽管未示出,但每个乳头肌151都通过腱索152连接到两个瓣叶。在乳头肌151和二尖瓣环154之间的腱索152和瓣叶153否则不连接到任何二尖瓣结构意外的东西,除非疗法涉及这两个部分152和153的任何变化,例如腱索和瓣叶修复疗法。
115.该实施例中的乳头肌151是实心块并且本身不收缩和松弛。相反,它模拟了乳头肌的尖端,因为它是腱索附着的部位。在该实施例中,通过使用乳头肌控制臂111移动乳头肌151来执行对乳头肌尖端的运动的模拟。因此,乳头肌151可以被认为是用于附接腱索152的附接块。
116.二尖瓣模型15的制造过程可以通过额外的过程进行升级,如下所示。在封闭的公模和母模系统内浇注硅胶之前,可以在模具内放置一些固体的附加材料。附加材料因瓣膜的不同部分而异:为瓣叶量身定制所需形状的棉布、用于作为腱索的钓鱼线以及具有患者特异性乳头肌尖端几何形状的3d打印塑料,其中乳头肌尖端包括腱索-乳头肌连接点的位置。在硅胶铸造之前,这些放置的附加材料必须以与生理连接相同的方式相互连接,通常是
通过缝合。硅胶浇铸后,这些额外的材料将嵌入硅胶层中。3d打印模具应最好包括二尖瓣几何结构的细节,例如瓣叶-腱索和腱索-乳头肌连接点。可采用真空室以避免在铸造过程中存在气泡。钓鱼线通常由编织(复丝)纤维制成,具有以下特性:无形状记忆、耐磨、至少3n拉伸载荷。所有其他材料必须足够坚固,以便二尖瓣15模型能够承受至少3n的载荷。
117.当本发明用于右心模拟时,二尖瓣模型15的制造方法和材料也适用于模型三尖瓣。
118.5.2.3臂13a
119.现参考以下三幅图:
120.·
图7是臂13a的3d绘图,重点是它与心腔容器11或21的壁和电机组110的连接方式。
121.·
图8是一个示意图,说明了臂13a的组件。
122.·
图9是图8中夹紧双板组件134的详细视图。
123.·
图10是臂13a的上半部分的横截面图,集中在控制机构上并且为了便于解释省略了电机组110。
124.在下面的描述中,将描述臂13a在左心室容器11中的连接和使用。然而,显然可以以类似的方式将臂13a附接到左心房容器21并在其中使用,以控制左心房模型室22。
125.臂13a和电机组110安装在室容器11或21的壁的内外两侧上(图7)。然而,很明显,电机组110的一部分可以设置在腔室容器11内部,和/或,臂13a的一部分可以延伸到腔室容器11之外。臂部包括允许对臂部13a进行2d旋转控制的旋转接头131,包括绕x轴和y轴的旋转(参见图8左侧的坐标系)。
126.在另一可选的实施例中,旋转接头131可以升级为具有更多自由度旋转控制围绕z轴(未示出)旋转。举例来说,这种升级可以是数字控制的球窝接头,其具有围绕所有x、y和z轴的旋转控制。
127.杆133a插入管132中形成可伸展的臂。双夹板组件134用于夹持心腔模型12和22(图9)的壁以实现对心室表面的一点的控制。夹紧双板组件134包括与杆133a成一体的上板1341和作为单独部件的下板1342。这两个板1341和1342用至少三个螺纹螺钉拧紧。双板组件134的角度可以在制造过程中定制,以适合特定的心室12和22的几何形状。
128.旋转和伸展自由度通过一系列控制机制进行控制。如图10所示,本实施例中的旋转接头包括双枢轴接头131,分别允许绕x轴和y轴旋转。如图所示。参照图10和11,四根关节控制线135附接到保持管132的部分以调整绕x轴和y轴的旋转姿势,但为了便于说明而从其他图中省略。图中,拉线135的前侧两根会使管子绕x轴向前旋转,拉线135的后侧两根会使管子绕x轴向后旋转,拉线135的右边两根会使管绕y轴向右旋转,拉动线135的左侧两根将使管绕y轴向左旋转。弹簧137提供推力将杆133a推向z 方向,一根伸展控制线136克服弹簧推力将杆133a拉向z-方向,从而控制拉动距离。
129.四根关节控制线135和伸展控制线136可被拉/松调整长度,使杆133a和夹持双板组件134向任意方向移动。
130.为了便于说明,图7、图8和图13中省略了电线135和136,图10和图11中省略了电机组。
131.接头控制线135和延伸控制线136穿过接头131和腔室容器11或21中的孔138延伸
至电机组110,电机组110被操作以控制夹紧双板组件134的位置。孔138被设计成允许所有线135和136的无障碍滑动,并且这些线中每根线的长度由电机组110中的一个电机控制。
132.伸展控制线136和弹簧137组件可以由任何其他可以数字控制的伸展控制装置代替,例如齿轮系统和液压泵。
133.在图11和图12所示的优选臂13c中,球窝接头139(图12)可以添加在杆133a和双夹板组件134之间。球窝接头具有不受控制的3d旋转自由度,以避免对心脏腔室模型12和22的受控表面点造成的不必要的形变。虽然未示出,但可以通过将螺纹螺钉插入杆133a的表面并透过杆表面压紧球关节139中的球,如果在更精确的模拟中需要。
134.与臂13a一样,夹紧双板组件134的板是可分离的,并且三个(或任何合适数量的)螺钉(未示出)用于将板夹紧在一起,将心腔模型12、22保持在它们之间.换句话说,安装板1341在心室12、22内部并且板1342在其外部。相同的安排适用于13b和13c。
135.5.2.4乳头肌控制臂111
136.现参考以下三幅图:
137.·
图13是乳头肌支架111的3d绘图,其包括臂13b和前臂14。
138.·
图14是示意图,显示了前臂14的组件。
139.·
图15是前臂14上半部分的横截面图,重点是控制机构。
140.乳头肌控制臂111包括臂13b和前臂14(图13)。前臂13b包括与前臂13a相同的结构,但前臂14具有额外的装配件和控制。如图4和图6所示,臂13b附接到左心室容器11并设置在腔室容器11和左心室模型12之间。上下板1341、1342夹紧左心室模型12。前臂14安装在臂13b的夹紧双板组件134的上板1341的表面上,前臂14位于心室模型12内。前臂14具有与臂13a相似的结构(图14)和相同的控制机构(图15)。
141.下表每行显示了前臂14和上臂13a之间的相同结构。
[0142][0143][0144]
接头控制线145和延伸控制线146穿过双夹板组件134、杆133b(图17)、管132、旋转接头131以及接头131中的孔138和左心室容器11的壁进入电机组110,用于以与臂13a类似的方式进行控制。为了便于说明,图13、图14和图17中省略了线145、146,图15中省略了臂13b,并且图13、图15和图17中省略了电机组。
[0145]
前臂14和上臂13a之间唯一的另一个主要区别是杆143上方的部分。连接垫144粘合在杆143的顶部,或以其他方式附接到杆143,或与杆143一体形成。连接垫144至少具有两个螺纹孔1441,使得乳头肌151可以通过螺丝148与连接垫144牢固连接(图16)。
[0146]
从外部看,臂13b与臂13a看起来相同(图13),因为唯一的区别是内部结构(图17)。臂13b具有臂13a的所有成分,此外,臂13b还具有以下成分。穿过杆133b钻出的孔138是为了
允许控制前臂14的姿势的线145和146到达电机组110并由电机控制。线145和146还共享导线135和136占用的路线。
[0147]
在控制上臂13a、13b、13c和前臂14的姿势的另一种方式中,手动控制线长可以代替电机数字控制,有效节省成本,但牺牲了相关部件的动态位置控制。这种简化装置的一个典型应用是由乳头肌位移引起的功能性二尖瓣反流模拟,因为乳头肌位置对二尖瓣瓣叶闭合有影响的唯一时刻是在收缩末期。在该应用中,迄今为止,学术研究认为将乳头肌保持在固定位置是可以接受的。
[0148]
5.2.5动态仿真控制
[0149]
控制系统5的一个功能是施加控制信号以驱动电机组110并提供对左心室左心房表面和乳头肌的动态位置的精确控制。
[0150]
每个电机控制一根线材135、136、145或146,所有电机共同控制线的牵引距离,进而控制接头131和141的旋转角度,以及杆133a、133b、133c和143的延伸长度.受控关节和延长杆共同实现上臂13a、13b、13c和前臂14自由端的3d位置控制。
[0151]
臂13a、13b、13c的多自由度运动使得腔室表面上的多个点能够受控地运动。控制点与控制心腔容积和跳动幅度和频率的泵3一起驱动心腔,使其跳动符合患者特异性生理运动。心腔生理运动的一个例子是左心室围绕垂直(心底-心尖轴)底尖轴的周期性轻微旋转运动。
[0152]
驱动信号必须以合理的精度周期性地改变以实现期望的生理心腔运动,类似地,通过对与乳头肌模型连接的前臂14的动态控制来实现患者特异性的乳头肌动态控制。
[0153]
重要的是,从机械控制的角度来看,可以独立控制左心室容器11内的乳头肌尖端,而不会影响左心室容器11的运动,这是一个新颖的功能发明。
[0154]
3d扫描(例如mri)将应用于心脏模拟器和患者,以获取心腔运动和乳头肌运动轨迹。相应地调整数字信号以确保模拟动作的准确性。mri扫描可以运行一定时间段,例如几秒,以生成4d视频,或者称为4d扫描。在本发明中可以使用3d或4d扫描。
[0155]
如此,控制装置5能够控制臂13a、13c的端部(以及它们所附接的腔室12、22的点)在模拟操作期间在三个维度上周期性地移动,以与心脏的跳动同步。它们也可以在模拟开始之前移动到预定位置。例如,左心室绕垂直底尖轴周期性的略微旋转可以与周期性搏动运动同步。
[0156]
可能有两个心腔模型和两个带有瓣下结构的瓣膜,模拟患者左心或右心的心脏结构。
[0157]
优选地,模拟器具有从身体扫描、临床测试和/或cad获得的患者特异性的几何结构、功能和症状。其中引起功能疾病的异常组织变形,由数字或手动驱动的机械组件控制。其中异常组织退化和钙化引起器质性疾病和其他器质性心脏病,由组织等效材料模拟。这些等效材料具有患者特异性的物理特性,例如刚度和强度以及几何形状,包括损坏的几何形状。
[0158]
一系列可编程的电机组被配置为通过控制机械组件的运动来模拟动态的患者特异性的心腔组织运动和变形,从而模拟患者在健康状况和功能性心脏病(包括异常心脏)下的特定心脏表现腔室扩张和乳头肌位移。
[0159]
本发明可用于模拟患者特异性的健康、不健康、手术前和手术后状况。
[0160]
5.2.6模拟流程
[0161]
图18显示了使用本发明的预测模拟流程。当要预测预定治疗的治疗结果时,将采取以下步骤:
[0162]
1.患者靶器官(以左心室为例)的临床扫描(一般为mri)数据是从患者的历史病历中获取的。包括健康状况和患病状况在内的左心室几何形状,被扫描获取并用于3d打印出制造心脏模型的模具,例如左心室模具、二尖瓣模具。
[0163]
2.心脏模型制造,例如通过将硅胶浇铸到3d打印模具中(上)制成。选择的硅胶具有与人体组织相似的物理性能。必要时,其他的材料将嵌入到硅胶层中,以实现钙化、组织的受损、腱索的断裂。健康的心腔模型和不健康的心腔模型需要分别制作。
[0164]
3.在健康和不健康的条件下运行独立的模拟。在健康状态模拟中,具有健康几何形状的模心腔型被设置为模拟健康状态,这模拟条件设置用的是从健康时期的医疗记录中获得的心脏功能参数,例如心输出量、心率、心腔搏动波形、每次搏动泵送的体积、血压。模拟的输出是疾病严重程度指标,例如二尖瓣有效孔口面积、二尖瓣反流分数,这些指标将与健康医疗记录进行比较。期望模拟输出与健康病历匹配,否则将进行诸如调节室和血液粘度之类的调整,直到观察到匹配为止。健康状况模拟作为基准,可以比较试验疗法的结果。健康状况模拟还可以用来确定后续的疗法模拟流程是否将会有效。如果无法调整健康状况模拟的参数,使模拟状况输出与健康病历匹配,则后续疗法模拟将不足以确定试验疗法是否有效。不健康状况的模拟具有相同的过程,不同之处在于用作模拟条件设置和用于与预期结果作对比的医疗记录是不健康状态下的医疗数据。
[0165]
4.在模拟器应用不健康状态设置的同时,对心腔模型应用多种疗法,旨在在不调整模拟条件设置的情况下提高模拟输出(症状严重程度)。疗法可以是开腔手术,例如外科二尖瓣修复和置换,或微创疗法,例如经导管瓣膜修复和置换。对于在治疗过程中不需要心脏停止跳动的微创疗法,心腔模型也必须在治疗过程中保持跳动。
[0166]
5.对于每种疗法,可以对不同的模拟腔进行不同方法的多次试验。例如,研究人员报告说,心脏植入物的角度、大小和几何形状会导致不同的结果。
[0167]
6.疗法模拟完成后,将应用各种设置,包括休息状态和运动状态,以及患者在他/她的余生中可能面临的任何情况,为后续疗法提供安全区域边界,预知植入体使用寿命。
[0168]
7.模拟完所有可能的条件后,将心腔模型取出以备将来比较。很明显,在每次治疗后不同的模拟腔中,哪一个心腔受到的损伤大,这可能代表疼痛和恢复期最长。这些信息是模拟结果的一部分。
[0169]
8.模拟疗法及其结果将进行比较和讨论。可以在更多轮模拟中模拟创新改进,直到获得风险可接受的满意结果。
[0170]
9、上述程序可用于新型植入体等创新疗法的研发。
[0171]
5.3其他
[0172]
前述内容仅为通过示例的方式给出的描述,本发明的范围不限于所描述的实施例。本领域技术人员知晓,本发明可以在由所附权利要求限定的范围内进行修改。
[0173]
例如,模拟器可以仅具有单个模拟腔容器和单个模型腔。腔室模型可以具有单个入口/出口,或者没有,并且不总需要设置瓣膜。在提供两个模拟腔的情况下,没有必要为它们都提供臂13a。
[0174]
一方面,本发明涉及提供臂以在模拟期间控制腔室模型上的点的位置移动。在提供瓣膜的情况下,不必能够在模拟期间控制模型乳头肌的位置,甚至根本不需要控制。
[0175]
类似地,本发明的其他方面涉及控制组织模型的位置,在特定实施例中为乳头肌尖端位置控制,通过可移动的控制臂(在模拟之前或期间)。优选地,乳头肌控制臂包括用于在具有6个自由度的三个维度上运动的关节臂(上臂13b和前臂14中的每一个都可以以3个自由度运动)。组织模型可以独立于它所在的腔室容器移动,甚至独立于组织模型(例如乳头肌151)所在的腔室(如果有的话)移动。因此,应该清楚的是,除了腔室容器之外,提供腔室模型对于本发明的这个方面不是必要的。因此,本发明的臂13a、13c或控制臂111可用于控制乳头肌尖端的位置,而不是用图2中的乳头肌控制臂112在模拟期间提供固定位置。
[0176]
本发明不限于模拟左侧心脏,也可用于模拟右侧心脏。它也可以用来模拟整个心脏。在任何这样的模拟器中,任何一个或多个心腔模型和瓣膜都可以用臂13a、13c或控制臂111控制,无论是用于控制乳头肌模型还是控制另一组织部分。
[0177]
本发明也可以模拟其他器官,例如肺或一对肺、肾脏或一对肾脏和膀胱,或器官的组合。因此,显然在根据本发明的模拟器中可能不需要包括瓣膜或任何入口或出口。还可以用单个孔口同时作为入口和出口。
[0178]
以上对本发明实施例公开的模拟器、人工心脏瓣膜、制造人工心脏瓣膜和臂的方法、预测方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的模拟器、人工心脏瓣膜、制造人工心脏瓣膜和臂的方法、预测方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。