技术特征:
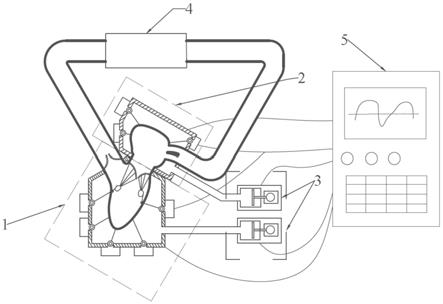
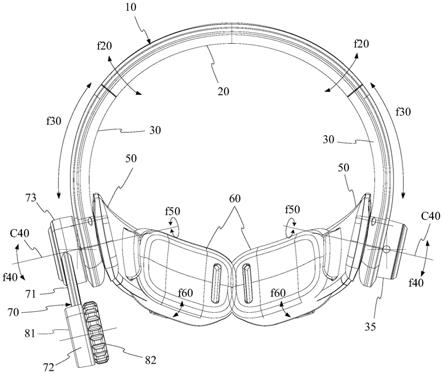
1.一种模拟器,其特征在于,包括:一个腔室容器;设置在腔室容器内并模拟活体腔室的柔性腔室模型;至少一个腔臂设置在腔室容器内,腔臂的远端相对于模拟腔上的一点固定,远端的位置可从近端控制,和用于控制模拟流程以模拟活体腔室运动的控制装置,该控制装置适于在模拟期间改变远端的位置。2.一种模拟器,其特征在于,包括:一种模拟活体腔室的柔性模拟腔,该柔性模拟腔具有至少一个开口;一个瓣膜,包括瓣叶;乳头肌实体模型;和连接乳头肌实体模型和瓣叶的腱索;至少一个瓣膜臂延伸穿过柔性模拟腔,使得瓣膜臂的远端设置在柔性模拟腔内,近端设置在柔性模拟腔外,瓣膜臂的远端相对于乳头肌实体模型固定且瓣膜臂的远端的位置可从近端控制;和用于控制模拟过程的控制装置。3.如权利要求2所述的模拟器,其特征在于,所述远端的位置是可调节的,以模拟活体乳头肌收缩末期的位置。4.根据权利要求2或权利要求3所述的模拟器,其特征在于,所述控制装置适于在模拟过程期间改变所述瓣膜臂的远端的位置。5.根据权利要求2至4中任一项所述的模拟器,其特征在于,可以在不影响柔性模拟腔的运动的情况下控制所述瓣膜臂的远端的位置。6.根据权利要求5所述的模拟器,其特征在于,所述瓣膜臂包括:第一旋转接头设置在柔性模拟腔内壁上;朝向远端的第一固定装置,用于固定至乳头肌实体模型;和在第一旋转接头和固定装置之间的第一可伸缩杆。7.根据权利要求6所述的模拟器,其特征在于,所述瓣膜臂还包括:朝向连接近端并设置在柔性模拟腔外部的第二旋转接头;第二固定装置位于第一旋转接头和第二旋转接头之间,用于固定到柔性模拟腔;和在第二旋转接头和第二固定装置之间的第二可伸缩杆。8.根据权利要求2至7中任一项所述的模拟器,其特征在于,柔性模拟腔包括第一模拟腔和第二模拟腔,其中第一模拟腔和第二模拟腔通过开口连接,瓣膜位于它们之间。9.根据权利要求2至8中任一项所述的模拟器,其特征在于,还包括:腔室容器,其中设置有腔室模型。10.根据权利要求9的模拟器,其特征在于,瓣膜臂的近端固定在腔室容器的壁上;控制电机邻近腔室容器的壁设置并连接至近端;和控制装置用于控制控制电机改变瓣膜臂远端的位置。
11.根据权利要求9或权利要求10所述的模拟器,其特征在于,还包括:至少一个腔臂设置在腔室容器内,腔臂的远端相对于柔性模拟腔上的一点固定,并且远端的位置可从近端控制,控制装置适于在模拟流程期间改变腔臂的远端的位置。12.根据权利要求1或权利要求11所述的模拟器,其特征在于,腔臂的近端固定于腔室容器的壁上;相应的控制电机设置在腔室容器的壁附近并连接到近端;和控制装置用于控制控制电机改变腔臂远端的位置。13.根据权利要求1、11或12中任一项所述的模拟器,其特征在于,所述腔臂包括:朝向近端的腔臂旋转接头;腔臂固定装置朝向远端以固定至柔性模拟腔;和腔臂可伸缩杆位于腔臂旋转接头和腔臂固定装置之间。14.根据权利要求13所述的模拟器,其特征在于,所述腔臂固定装置包括布置在所述柔性模拟腔的内外两侧上的用于夹紧所述柔性模拟腔的夹板。15.根据权利要求13或权利要求14所述的模拟器,其特征在于,所述腔臂固定装置通过球窝接头附接到所述腔臂可伸缩杆。16.根据权利要求6、7或13至15中任一项所述的模拟器,其特征在于,每个旋转关节的位置由各自的关节控制线控制,并且每个可伸缩杆的伸展由各自的伸展控制装置控制。17.根据权利要求1或11至16中任一项所述的模拟器,其特征在于,模拟腔模拟左心室;和控制装置被布置成控制腔臂远端位置,以在模拟过程中使左心室围绕心底-心尖轴旋转,与心室的周期性搏动运动同步。18.根据前述权利要求中1-17任一项所述的模拟器,其特征在于,用于模拟左心和右心中的至少一个。19.一种人造心脏瓣膜,其特征在于,包括:环;附在环上的瓣叶;腱索;和一个附接块;其中腱索的末端分别附接到瓣叶和附接块上,瓣叶由第一材料形成,腱索由第二材料构成,附接块由第三材料形成,并且覆盖层围绕第一材料、第二材料和第三材料模制并且由不同于第一材料、第二材料和第三材料的第四材料形成。20.根据权利要求19所述的人造心脏瓣膜,其特征在于,包括多个瓣叶和多个附接块,其中每个附接块通过腱索连接到若干个瓣叶。21.根据权利要求19或权利要求20的人造心脏瓣膜,其特征在于,第一材料、第二材料和第三材料彼此不同。
22.根据权利要求19至21中任一项所述的人造心脏瓣膜,其特征在于,所述第一材料是布材料。23.根据权利要求19至22中任一项所述的人造心脏瓣膜,其特征在于,所述第二材料是编织线。24.根据权利要求19至23中任一项所述的人造心脏瓣膜,其特征在于,所述第三材料是固体塑料。25.根据权利要求19至24中任一项所述的人造心脏瓣膜,其特征在于,所述第四材料是硅胶。26.根据权利要求19至25中任一项所述的人造心脏瓣膜,其特征在于,在模内加筑覆盖层之前将所述第一材料、第二材料和第三材料缝合在一起。27.根据权利要求19至26中任一项所述的人造心脏瓣膜,其特征在于,所述人造心脏瓣膜是二尖瓣。28.根据权利要求19至27中任一项所述的人造心脏瓣膜,其特征在于,所述人造心脏瓣膜是人用假体。29.一种制造根据权利要求19至28中任一项所述的人造心脏瓣膜的方法,其特征在于,该方法包括:成型模具;将第一材料、第二材料和第三材料定位在模具中;和用第四材料填充模具以形成围绕第一材料、第二材料和第三材料的覆盖材料。30.根据权利要求29的方法,其特征在于,还包括:获得个体相应瓣膜的扫描,将其形成模具并且将第一材料、第二材料和第三材料定位在模具中,使得腱索和附接块之间以及腱索和瓣叶之间的连接点的位置与个体中的那些连接点相匹配。31.一种用于腔室模型的腔臂,其特征在于,其腔室模型用于模拟活体腔室,所述腔臂包括:朝向远端的第一固定装置用于固定至模拟腔的一部分;朝向近端的第一旋转接头;和在第一旋转接头和第一固定装置之间的第一可伸缩杆,其中,远端的位置可从近端控制。32.根据权利要求31所述的腔臂,其特征在于,还包括壁固定装置,用于将腔臂的近端固定到包含所述腔室模型的腔室容器的壁上。33.根据权利要求31或32所述的腔臂,其特征在于,所述第一旋转接头的位置由接头控制线控制,所述第一可伸缩杆的伸长由伸长控制线控制。34.根据权利要求31至33中任一项所述的腔臂,其特征在于,还包括位于所述近端的控制电机,所述控制电机可被控制以改变所述腔臂的远端的位置。35.根据权利要求31至34中任一项所述的腔臂,其特征在于,所述第一固定装置包括布置在所述模拟腔腔壁内外两侧用于夹持所述模拟腔的夹板。36.根据权利要求31至35中任一项所述的腔臂,其特征在于,所述第一固定装置通过球窝接头附接到所述第一可伸缩杆。
37.一种瓣膜臂,其特征在于,包括:根据权利要求31至36中任一项所述的腔臂;在第一固定装置和瓣膜臂的远端之间的第二可伸缩杆;朝向瓣膜臂远端的第二固定装置,用于固定在模拟腔中的乳头肌实体模型上;和第二可伸缩杆和第一固定装置之间的第二旋转接头。38.根据权利要求37所述的瓣膜臂,其特征在于,所述第二旋转接头的位置由相应的接头控制线控制,并且所述第二可伸缩杆的伸长由相应的伸长控制线控制。39.一种预测方法,其特征在于,所述预测方法用于预测对有症状的个体的器官进行所提议的外科治疗的结果,该方法包括:器官扫描;基于扫描形成至少一个第一实体模型以模拟处于症状状态的器官;使用从有症状的患者的病例获得的第一实体模型和器官功能参数运行第一模拟以获得器官模型的第一疾病严重度指标;通过调整第一模拟运行第二模拟,直到第一疾病严重度指标与有症状的患者的医疗记录相匹配;在第二模拟中进行建议的手术疗法并获得器官模型的第二疾病严重程度指标;和通过将第二疾病严重程度指标与健康或既往状况患者的医疗记录进行比较来确定所提议的手术疗法的有效性。40.根据权利要求39的方法,其特征在于,还包括:基于用于模拟处于健康或先前状态的器官的扫描,形成至少一个对应的第二实体模型;在运行第一模拟之前,使用从健康或先前状况的患者获得的第一实体模型和器官功能参数运行初始模拟以获得器官模型的初始疾病严重度指标;将初始疾病严重程度指标与患者健康或既往状况的医疗记录进行比较;调整初始模拟,直到初始疾病严重程度指标与患者在健康或先前状况下的病历相匹配;和通过将匹配后的初始疾病严重程度指标与处于健康或先前状况的患者的医疗记录进行比较来确定该方法的可行性。41.根据权利要求39或权利要求40的方法,其特征在于,器官模型是心脏模型,第一实体模型和第二实体模型模拟左心或右心,或左心或右心的一部分,并且第一模拟和第二模拟用于模拟左心或右心中至少一个的心动状态。42.根据权利要求39至41中任一项所述的方法,其特征在于,所述第一模拟,包括模拟在执行所提议的外科疗法之后处于休息状态和锻炼状态下的器官,以评估这两种状态下疗法对器官的损伤。43.根据权利要求39至42中任一项所述的方法,其特征在于,还包括:制作多个第一模型;为每个第一模型运行各自的第一模拟和第二模拟;对各自的第二模拟进行不同的手术疗法;和根据相应的第二疾病严重程度指标中的哪一个与处于健康或先前状况的患者的病历
最匹配来确定不同手术疗法中的哪一个最有效。
技术总结
本发明涉及模拟器、人工心脏瓣膜、制造人工心脏瓣膜和臂的方法、预测方法,包括腔室容器的模拟器;设置在腔室容器内并模拟活体腔室的柔性腔室模型;至少一个腔臂设置在腔室容器内,腔臂的远端相对于腔室模型上的一点固定,远端的位置可从近端控制。控制装置,用于控制模拟流程以模拟活体腔室的运动,该控制装置适于在模拟期间改变远端的位置。这种模拟器允许精确模拟活体腔室的运动,例如人心脏的左心室或右心室,在这种情况下,可以模拟搏动期间腔室的精确旋转和/或其他运动。室的精确旋转和/或其他运动。室的精确旋转和/或其他运动。
技术研发人员:周文博
受保护的技术使用者:周文博
技术研发日:2022.01.07
技术公布日:2022/4/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。