1.本发明涉及生物信号的采集技术领域,尤其涉及一种初始压力可调的肌压传感阵列结构及其调节方法。
背景技术:
2.在康复医疗领域,特别是与肌肉相关疾病的康复治疗,例如脑卒中后的运动康复,需要用到肌肉活动状态的感知。对肌肉活动的精确感知,可以为医疗康复机器人控制器提供与人体运动意图相匹配的控制命令。换言之,肌肉活动的探测是人机接口的重要组成部分,是实现人体与机器协同工作的必要前提。本专利涉及的肌压采集技术,正是能够有效获取肌肉活动,并判断人体意图的有效手段。
3.在肌肉状态感知领域,肌电是一种基于生物电信号的采集技术,它是最常见的一种肌肉活动探测技术。然而,肌电信号,作为一种电信号,容易受到外界电磁环境的干扰,在实际应用中并不稳定。因此,在寻找替代肌电信号的过程中,研究人员提出了包括超声、近红外、肌压在内的众多替代感知方式。其中,因为肌压采集技术成本低,稳定性高,所以近年来备受关注。
4.传统的肌压信号采集过程中需要将压力传感器固定在不具有伸缩性的柔性材料上,并包裹于皮肤表面。因此,压力传感器的初始值往往具有很大的随机性,不利于后期对肌压信号的分析与识别。因此,本发明专利提出了一种初始压力可调的肌压传感阵列结构及其调节方法。
技术实现要素:
5.本发明针对现有技术存在的缺陷,提供一种初始压力可调的肌压传感阵列结构及其调节方法。
6.为了实现以上目的,本发明采用以下技术方案:
7.一种初始压力可调的肌压传感阵列结构,包括传感器保护基座、传感器保护基座封盖、传感器灵敏度增强探头、肌压阵列外壳、外壳固定器、调节螺丝、磁铁、传感器、第一空心圆柱;
8.所述传感器的引脚安装于传感器保护基座一侧的内部;传感器保护基座封盖与传感器灵敏度增强探头均设置于传感器保护基座的一侧;磁铁设置于传感器保护基座另一侧的内部,第一空心圆柱套设于传感器保护基座的另一侧;所述传感器保护基座、外壳固定器均通过调节螺丝安装于肌压阵列外壳上。
9.进一步的,所述传感器保护基座包括第一安装槽、第二安装槽、第二空心圆柱、安装孔;所述第一安装槽与第二安装槽连通,第二空心圆柱与第一安装槽底部连接,安装孔设置于第二安装槽侧面;安装孔用于使传感器的引脚穿过并设置于第二安装槽中,第一安装槽用于安装传感器灵敏度增强探头,第二安装槽还用于安装传感器保护基座封盖,第二空心圆柱用于安装磁铁。
10.进一步的,所述肌压阵列外壳包括肌压阵列上壳体、肌压阵列下壳体;所述肌压阵列上壳体、肌压阵列下壳体均设有外壳固定器通道、传感器位置调节通道、传感器通道、固定栓通道;所述外壳固定器通道用于通过调节螺丝与外壳固定器连接,传感器位置调节通道用于通过调节螺丝与传感器保护基座连接,传感器通道用于使传感器保护基座穿过,固定栓通道用于通过固定栓将外壳包括肌压阵列上壳体、肌压阵列下壳体固定连接。
11.进一步的,所述传感器的引脚焊接于第二安装槽内。
12.进一步的,所述传感器保护基座封盖的一端设有凸起。
13.进一步的,所述传感器保护基座与调节螺丝通过磁铁的磁吸连接。
14.相应的,还提供一种初始压力可调的肌压传感阵列结构的调节方法,包括一种初始压力可调的肌压传感阵列结构,调节方法包括:
15.s1.组装传感器、传感器保护基座以及肌压阵列外壳;
16.s2.将传感器的导线连接至肌压信号采集设备;
17.s3.获取肌压信号采集设备采集的当前肌压信号值;
18.s4.通过旋转调节螺丝进行调节传感器的位置,改变传感器与肌肤之间的压力。
19.与现有技术相比,本发明可以快速调节压力传感器的位置进而获取到不同的压力值,进而获取肌肉收缩或舒张时作用于压力传感器的压力变化,便于后期对肌压信号的分析与识别。
附图说明
20.图1是实施例一提供的传感器保护基座结构图;
21.图2是实施例一提供的传感器保护基座封盖结构图;
22.图3是实施例一提供的传感器灵敏度增强探头结构图;
23.图4是实施例一提供的第一空心圆柱结构图;
24.图5是实施例一提供的肌压阵列外壳结构图;
25.图6是实施例一提供的外壳固定器结构图;
26.图7是实施例一提供的固定栓结构图;
27.图8是实施例一提供的传感器保护基座装配示意图。
具体实施方式
28.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
29.本发明的目的是针对现有技术的缺陷,提供一种初始压力可调的肌压传感阵列结构及其调节方法。
30.实施例一
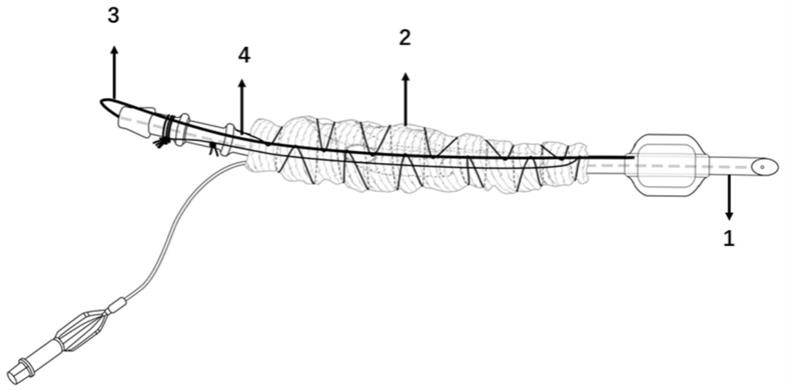
31.本实施例提供一种初始压力可调的肌压传感阵列结构,如图1-8所示,包括传感器保护基座1、传感器保护基座封盖2、传感器灵敏度增强探头3、肌压阵列外壳4、外壳固定器
5、调节螺丝、磁铁、传感器、第一空心圆柱6、固定栓7。
32.传感器的引脚安装于传感器保护基座1一侧的内部;传感器保护基座封盖2与传感器灵敏度增强探头3均设置于传感器保护基座1的一侧;磁铁设置于传感器保护基座1另一侧的内部,第一空心圆柱6套设于传感器保护基座1的另一侧;传感器保护基座1、外壳固定器5均通过调节螺丝安装于肌压阵列外壳4上。
33.本实施例采用的传感器型号为fsr400,传感器fsr400的平面构成大致为半径为3.81mm的圆形和长度16mm的长方形构成。fsr400传感器具有面积小、灵敏度高、使用电路简单等特点,是研究肌压信号的常用选择。
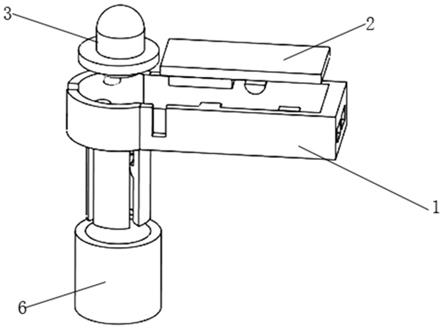
34.如图1所示为传感器保护基座的结构示意图,传感器保护基座1包括第一安装槽11、第二安装槽12、第二空心圆柱13、安装孔14;第一安装槽11与第二安装槽12连通,第二空心圆柱13与第一安装槽11底部连接,安装孔14设置于第二安装槽12侧面;安装孔14用于使传感器的引脚穿过并设置于第二安装槽12中,第一安装槽11用于安装传感器灵敏度增强探头3,第二安装槽12还用于安装传感器保护基座封盖2,第二空心圆柱13用于安装磁铁。
35.第一安装槽11为设有一端开口的类圆形,第二安装槽12为长方形,该长方形的一端与圆形开口处连通,长方形的另一端开设有安装孔14,在第一安装槽11的底部与第二空心圆柱13的一端固定连接,第二空心圆柱13的另一端开口,且本实施例的第二空心柱13侧面也可以设有开口,进而可以适配不同的磁铁。
36.传感器保护基座1用于安装传感器,因此其设置的尺寸需要与传感器相适配,进而本实施例传感器保护基座1设计为一个4mm的圆形第一安装槽11和长度为22mm的长方形第二安装槽12。由于3d打印技术的限制和打印材料的硬度限制,传感器保护基座1的腔体高度设计为3mm,传感器保护基座1整体厚度设计为1mm。在第二安装槽12的内部边缘部分,一侧设计2个半圆凸体,另一侧设计了1个半圆凸体,作为传感器保护基座封盖2的卡扣。在第一安装槽21的边缘部分,两边各设计了1个半圆凸体,作为传感器灵敏度增强探头3的卡扣。
37.本实施例将传感器引脚的导线首先穿过安装孔14,再将导线与传感器引脚焊接在一起,之后将传感器平铺在传感器保护基座1内部。
38.如图2所示为传感器保护基座封盖的结构示意图,传感器保护基座封盖2为长方形,该长方形的大小与第二安装槽12的大小相适配。
39.在本实施例中,由于传感器尾端焊接导线后其厚度偏大,因此在传感器保护基座封盖2的前端设有1mm的凸起,该前端的总厚度为2mm,其余地方厚度为1mm。
40.如图3所示为传感器灵敏度增强探头的结构示意图,传感器灵敏度增强探头3的由第一圆柱、第二圆柱和一个半圆球组成,第一圆柱穿过第二圆柱与半圆球连接;其中第一圆柱的半径小于第二圆柱的半径,第一圆柱的半径与半圆球的半径相同。
41.由于传感器fsr400的感应区域为5mm,为了避免影响传感器的灵敏度,并且传感器保护基座1高度的限制,传感器灵敏度增强探头3的底部设计为直径为4mm,高度为1mm的第一圆柱体,其上为直径7.8mm,高度为1mm的第二圆柱体和直径为4mm的半球体。半球体的设计可以使得该模具贴合皮肤时不会感到很大的异样感。
42.如图4所示为第一空心圆柱的结构示意图,第一空心圆柱6为上下均开口的空心圆柱。
43.在传感器保护基座1背部设计有一个内直径径为4.2mm,厚度为1mm,高度为12mm的
第二空心圆柱13,用以放置直径为4mm的圆形纽扣磁铁。为了避免磁铁滑落,在第二空心圆柱13的高度为3.2mm处设置有一个内直径为3mm的阻塞体。为了方便传感器的放置,阻塞体上边缘设置为光滑面。将磁铁放置进该圆柱内后,再使用内直径为5.3mm的第一空心圆柱6套在其上,防止其在活动过程中发生形变。
44.如图5所示为肌压阵列外壳结构示意图,肌压阵列外壳4包括肌压阵列上壳体41、肌压阵列下壳体42;肌压阵列上壳体41、肌压阵列下壳体42均设有4个外壳固定器通道43、数个传感器位置调节通道44、1传感器通道45、数个固定栓通道46。外壳固定器通道43用于通过调节螺丝与外壳固定器5连接,传感器位置调节通道44用于通过调节螺丝与传感器保护基座2连接,传感器通道45用于使装配好的传感器保护基座1的传感器的导线穿过,固定栓通道46用于通过固定栓7将外壳包括肌压阵列上壳体41、肌压阵列下壳体42固定连接。其中在肌压阵列外壳4和传感器保护基座1之间连接使用的是调节螺丝和磁铁相互吸引。
45.本实施例设一般成年人的最大臂围处横切面长度一般不超过100mm,纵向切面长度一般不超过800mm,因此将该肌压阵列外壳4的宽口设置为长半轴为130mm,短半轴为100mm的椭圆。为了便于佩戴,选择将肌压阵列外壳4的长度设置为100mm。经过测量,一般成年人在距离最大臂围100mm处的手臂横切面长度一般不超过80mm,纵向切面一般不超过70mm,因此将肌压阵列外壳4的另一面设置为长半轴为100mm,短半轴为90mm的椭圆。
46.在肌压阵列外壳4预留的传感器位置调节通道44内依次放入长度为50mm的m4铁质螺丝作为调节螺丝,再将已经装配好的传感器保护基座1以及传感器通过预留的传感器位置调节通道44放入肌压阵列外壳内部,之后将调节螺丝放入传感器保护基座1背部的第二空心圆柱13内,通过磁铁的吸附作用连接在一起。
47.如图6所示为外壳固定器的机构示意图,外壳固定器5为两个弧形结构,用于通过调节螺丝安装于外壳固定器通道43上。
48.由于人体手臂的切面大致呈现椭圆状,因此将最大臂围处的外壳固定器5设计为长半轴为80mm,短半轴为60mm,厚度为1mm,高度为3mm的空心圆柱体,肌压阵列外壳4的另一面的固定器设计为长半轴为60mm,短半轴为40mm,厚度为1mm,高度为3mm的空心圆柱体。为了使得外壳固定器5能够适合于不同规格的手臂,将其通过长半轴与短半轴划分为4段,通过螺母固定在肌压阵列外壳上。
49.如图7所示为固定栓的结构示意图,固定栓7用于穿过肌压阵列上壳体41、肌压阵列下壳体42并将两个壳体固定。
50.一种初始压力可调的肌压传感阵列结构装配方式具体为:
51.1、将传感器引脚的导线穿过安装孔14并与传感器引脚焊接在一起。
52.2、将传感器平铺在传感器保护基座1内部(第一安装槽11和第二安装槽12内),多余的导线拖出传感器保护基座1内部。
53.3、将传感器保护基座封盖2盖于第二安装槽12上,且卡于凸体下方,将传感器灵敏度增强探头3盖于第一安装槽11上,且卡于凸体下方。
54.4、将直径为4mm、高度为3mm的磁铁放置于第二空心圆柱13内。
55.5、将直径为5.3mm、高度为8mm的第一空心圆柱6套与第二空心圆柱13上,进而完成传感器与传感器保护基座的装配,如图8所示。
56.6、在肌压阵列外壳4预留的传感器位置调节通道44内依次转入调节螺丝。
57.7、将装配完成的传感器保护基座1通过预留的传感器位置调节通道44放入肌压阵列外壳内部。
58.8、传感器保护基座1的第二空心圆柱13通过内部的磁铁磁吸于调节螺丝上。
59.9、将外壳固定器5首先拧一颗调节螺丝,预估大概位置后将其放入外壳固定器通道43。
60.10、将肌压阵列上壳体41、肌压阵列下壳体42分别套在手臂上,将固定栓7穿过外壳固定器通道43将上下壳体连接在一起。
61.本实施例的肌压阵列在可以获取更优质的肌压信号同时,实现了初始电压可调节的需求;且可以快速调节压力传感器的位置进而获取到不同的压力值,进而获取肌肉收缩或舒张时作用于压力传感器的压力变化,便于后期对肌压信号的分析与识别。
62.实施例二
63.本实施例提供一种初始压力可调的肌压传感阵列结构的调节方法,包括实施例一的一种初始压力可调的肌压传感阵列结构。
64.调节方法包括:
65.s1.组装传感器、传感器保护基座以及肌压阵列外壳;
66.s2.将传感器的导线连接至肌压信号采集设备;
67.s3.打开肌压信号采集设备,通过计算机屏幕查看当前肌压信号值;
68.s4.通过旋转调节螺丝进行调节传感器的位置,改变传感器与肌肤之间的压力。
69.本实施例将肌压阵列外壳的上下两部分分别套在手臂上,通过固定栓将两部分连接在一起,测量信号时需要先通过调节螺丝将传感器放置于所需求的位置。
70.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。