1.本发明涉及水下无人装备悬停姿态控制组件承载机构领域,具体地,涉及水下无人装备单驱联动展开机构及展开方法。
背景技术:
2.以uuv、auv、hov、rov等无人水下航行器作为搭载平台,配置探测与反探测、识别与反识别、干扰与反干扰、跟踪与反跟踪等功能部件所形成的水下无人装备在水下侦察、水下通信和反潜、反鱼水雷作战、信息作战等领域得到广泛的应用,也是各国海军装备研制的重点方向。
3.水下无人装备的运动和悬停通常采用桨 舵联合操控的形式,其中浆的设计根据动力需求采用单浆或同轴的多浆方式。随着装备尺度的增大,重量的增加,悬停姿态控制精度要求的提升,借鉴多旋翼无人机航行控制方式,平面多浆布置方式应运而生。但是,在特定环境下实现平面多浆安装需要解决以下问题。
4.首先,某水下无人装备通过发射管进行释放,受发射管管体尺寸的影响,在发射管内平面式多浆外形的最大外径不能超出弹本体尺寸,同时,在水下无人装备运输过程中,需要考虑螺旋桨的安全性问题,这些因素要求在装备处于运输以及发射管内时,平面式多浆外形尺寸要小于弹本体尺寸。而为了尽可能发挥平面多浆技术优势,在装备处于工作阶段时,多浆所形成圆半径尽可能大。基于上述因素,平面多浆承载方式需要采用收放和弹出机构。
5.其次,不同于鱼雷或导弹的舵板或翼板的展开,上述展开机构安装有传感器、电机等精密部件,在动作过程中,不能产生大的冲击,以防对螺旋桨部件产生顺坏。
6.最后,展开机构搭载于水下无人平台,需要满足强承压、小体积、高可靠、尽量不要用火工品进行作动等要求。
7.基于上述分析,本发明提出了一种水下无人装备单驱联动展开机构及方法,结合使用环境,充分利用涡旋弹簧、齿轮传动、某无人装备执行动作等特点,创新性地满足使用需求。
技术实现要素:
8.针对现有技术中的缺陷,本发明的目的是提供一种水下无人装备单驱联动展开机构及展开方法,高可靠、小占空比、无额外能耗地完成多浆展开,在各约束条件下,实现装备多浆安装的平面化,满足无人装备的高精度航行及悬停。
9.根据本发明提供的一种水下无人装备单驱联动展开机构,包括从动齿轮、主动齿轮、涡旋弹簧以及锁定插销,从动齿轮、主动齿轮、涡旋弹簧以及锁定插销分别连接于水下无人装备本体上,从动齿轮与主动齿轮啮合,涡轮弹簧连接主动齿轮;
10.主动齿轮通过涡轮弹簧提供动力做圆周运动,从动齿轮在主动齿轮的带动下做同步运动,驱使从动齿轮的伸展臂展开,当从动齿轮展开到预定位置后,锁定插销在圆柱弹簧
的作用下插入从动齿轮的限位孔内进行锁定。
11.一些实施例中,从动齿轮通过转轴固定于水下无人装备本体上,主动齿轮通过端盖固定在水下无人装备本体中部的端面转轴上。
12.一些实施例中,涡旋弹簧一端嵌入端面转轴插槽内,涡旋弹簧另一端嵌入主动齿轮插槽内,涡轮弹簧通过端盖连接于出动齿轮和水下无人装备本体之间。
13.一些实施例中,还包括定位插销,定位插销贯通于主动齿轮与端面转轴之间的贯通孔内,定位插销的柔性钢丝通过主动齿轮上的安装绳卡座夹紧。
14.一些实施例中,定位插销为已完成变形储能的涡旋弹簧提供限位。
15.一些实施例中,当从动齿轮运动至预设位置后,限位销一端连接于水下无人装备本体中部端面的圆孔内,限位销另一端通过圆柱弹簧插入从动齿轮的限位孔内。
16.一些实施例中,从动齿轮的限位孔内设有导向倒角。
17.一些实施例中,主动齿轮上设有圆盘、插槽以及减重槽口,圆盘上设有减重槽口,减重槽口中连接有插槽,涡轮弹簧置于圆盘内,涡轮弹簧通过减重槽口提供施力点。
18.一些实施例中,主动齿轮、端面转轴以及端盖之间、从动齿轮、水下无人装备本体、转轴之间均采用间隙配合方式。
19.本发明还提供了一种水下无人装备单驱联动展开机构的展开方法,包括以下步骤:
20.s1、水下无人装备发射出管后,水下无人装备本体呈垂直姿态,本体尾部同步脱落,本体尾部脱落产生的拉力通过定位插销拉脱绳将定位插销拉脱;
21.s2、在已施加预应力的涡轮弹簧的作用下,主动齿轮沿中心轴做圆周运动;
22.s3、在主动齿轮的带动下,多个从动齿轮沿自身轴心做圆周运动,带动伸展臂同步展开;
23.s4、当从动齿轮旋转到设定角度后,锁定插销在圆柱弹簧的作用下嵌入从动齿轮的限位孔内,驱使展开机构工作结束。
24.与现有技术相比,本发明具有如下的有益效果:
25.(1)本发明提出的一种水下无人装备单驱联动展开机构及方法具有自锁紧功能,区别与传统折叠弹翼展开机构需要发射筒对其限位,在装备发射时,可消除其对发射筒的摩擦,延长发射筒使用寿命;
26.(2)本发明提出的一种水下无人装备单驱联动展开机构及方法,用涡旋弹簧作为动力源,用装备本体尾部脱落产生的拉力作为展开机构启动的触发信号,无需弹上控制指令、电机或火工品等复杂部件,结构简单可靠,尺寸小,仅占弹体轴向尺寸35mm,成本低,无需额外能耗;
27.(3)本发明提出的一种水下无人装备单驱联动展开机构及方法,若干从动齿轮啮合于同一主动齿轮,展开同步性好且不存在压差,对全弹姿态干扰小,同时适用于深海环境;
28.(4)本发明提供的定位插销利用柔性钢丝的特点,简易地实现其在不大于20g的加速度冲击下不脱落,在大于40n的拉力下完全拉脱之要求,符合实际使用工况要求。
附图说明
29.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
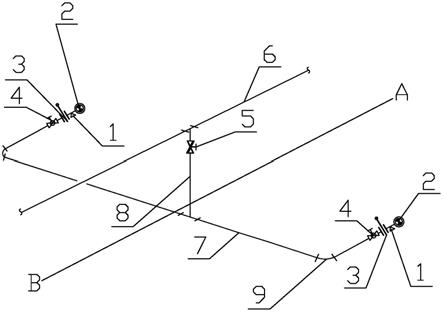
30.图1为本发明展开机构在尾部非脱落状态下的无人水下装备本体中的位置示意图;
31.图2为图1中的a-a剖视图;
32.图3为图2中的b-b剖视图;
33.图4为本发明展开机构在尾部脱落状态下的无人水下装备本体中的位置示意图;
34.图5为本发明在展开状态下展开机构的仰视图;
35.图6为图5中c-c剖视图;
36.图7为本发明中主动齿轮的结构示意图;
37.图8为本发明中从动齿轮的结构示意图;
38.图9为本发明中涡旋弹簧的结构示意图;
39.图10为本发明中定位插销的结构示意图;
40.图11为本发明中安全绳卡座的结构示意图。
41.图中标号:
42.水下无人装备本体1、端面转轴11、展开机构2、从动齿轮21、主动齿轮22、圆盘221、插槽222、减重槽口223、涡旋弹簧23、定位插销24、插销体241、柔性钢丝242、安装绳卡座25、转轴26、端盖27、锁定插销28、本体尾部3、定位插销拉脱绳4。
具体实施方式
43.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
44.实施例1
45.本发明提供的一种水下无人装备单驱联动展开机构,包括从动齿轮21、主动齿轮22、涡旋弹簧23、定位插销24、安装绳卡座25、转轴26、端盖27、锁定插销28以及圆柱弹簧29;
46.多个从动齿轮21通过转轴26固定于水下无人装备本体1上,多个从动齿轮21周向均匀分布于主动齿轮22外侧、且与主动齿轮22同时啮合。主动齿轮22通过端盖27固定在水下无人装备本体1中部的端面转轴11上。如图7所示,主动齿轮22上设有圆盘221、插槽222以及减重槽口223,圆盘221上设有减重槽口223,减重槽口223中连接有插槽222,涡轮弹簧23置于圆盘221内,涡轮弹簧23通过减重槽口223提供施力点。优选的,如图2所示,减重槽口223用于涡旋弹簧23卡位的槽口,要为涡旋弹簧23提供径向的伸缩空间,减少因涡旋弹簧工作时所产生的径向分力对主动齿轮22做圆周运动的影响。涡旋弹簧23一端嵌入端面转轴11插槽内,涡旋弹簧23另一端嵌入插槽222内,涡轮弹簧23通过端盖27连接于出动齿轮22和水下无人装备本体1之间,防止其脱落,为主动齿轮22运动提供动力。
47.定位插销24贯通于主动齿轮22与端面转轴11之间的贯通孔内,定位插销24通过安装绳卡座25夹紧,安装绳卡座25通过螺栓固定在主动齿轮22上。定位插销24为已完成变形
储能的涡旋弹簧23提供限位。其中,定位插销24包括柔性钢丝242和插销体241,柔性钢丝242装入插销体241的圆孔内,并可采用低温锡焊的方式将它们焊接成一体。定位插销24贯通于主动齿轮22与水下无人装备本体1中部端面之间的贯通孔内,并通过柔性钢丝限位于主动齿轮22,柔性钢丝采用安全绳卡座25夹紧于主动齿轮22之间。其中,在不大于20g冲击加速度作用下,定位插销24不脱落,涡旋弹簧23的储能不释放;在大于40n的外力作用下,定位插销24顺利脱落,涡旋弹簧23的储能开始释放。
48.在初始状态下,锁定插销28一端嵌入水下无人装备本体1中部端面的圆孔内,另外一端约束于从动齿轮21端面之间;当从动齿轮21运动至预设位置后,限位销28一端连接于水下无人装备本体1中部端面的圆孔内,限位销28另一端通过圆柱弹簧29插入从动齿轮21的限位孔内,对展开机构2进行限位。
49.更为具体的,主动齿轮22、从动齿轮21、定位插销24、安全绳卡座25、端盖27、转轴26、锁定插销28可采用防锈铝合金3a21并采用微弧氧化表面处理工艺,降低机构重量的同时,满足海水长时间浸泡以及耐磨性能要求;涡旋弹簧23、圆柱弹簧29可采用316l不锈钢材质,满足耐海水腐蚀性要求。
50.如图8所示,从动齿轮21可基于展开长度指标要求设计合适尺寸的圆弧形状伸展臂,圆弧形状充分利用水下无人装备本体圆形的特点,根据安装部件的需要,可在伸展臂的顶部设计相关要素。
51.如图11所示,安全绳卡座25设计有半圆孔,圆孔直径可根据柔性钢丝直径、所需拉脱力大小进行设置,对圆孔的端部做倒角处理,以方便柔性钢丝顺利脱出。
52.如图6所示,从动齿轮21对应锁定插销28的限位孔,设计了导向倒角,以使从动齿轮21运动到合适位置时,锁定插销28在圆柱弹簧29作用下嵌入孔内,形成锁定状态。
53.主动齿轮22、端面转轴11以及端盖27之间、从动齿轮21、水下无人装备本体1、转轴26之间均采用间隙配合方式,保证主动齿轮22、从动齿轮21沿轴心做圆周运动顺畅。
54.工作原理:主动齿轮22通过涡轮弹簧23提供动力做圆周运动,从动齿轮21在主动齿轮22的带动下做同步运动,实现从动齿轮21的伸展臂同时展开,当从动齿轮21展开到预定位置后,锁定插销28在圆柱弹簧29的作用下插入从动齿轮21的限位孔内进行锁定。
55.综上所述,实现多伸展臂同步展开,工作同步性好且不存在压差,有效抑制展开动作对水下无人装备本体姿态的干扰,同时适用于深海环境。展开机构2无需电机或火工品等复杂部件,结构简单可靠,尺寸小,仅占弹体轴向尺寸35mm,成本低,无需水下无人装备1内部电池供电,无额外能耗。
56.实施例2
57.本实施例2是在实施例1的基础上完成的,具体如下:
58.如图2所示,本实施例包括一个主动齿轮22、四组从动齿轮21、一组涡旋弹簧23、一组定位插销24、两个安全绳卡座25、一个端盖27、四根转轴26、四组锁定插销28以及四组圆柱弹簧29。
59.四组从动齿轮21同时啮合于主动齿轮22,在主动齿轮22的带动下,四组从动齿轮21做同步运动,当四组从动齿轮21运动到预定位置后,四组锁定插销28在四组圆柱弹簧29的作用下插入从动齿轮21的限位孔内,展开机构完全锁定。
60.进一步的,所述的主动齿轮22、从动齿轮21的齿数可根据尺寸要求、单曲联动数量
进行确定,本实施例中,主动齿轮22的齿数为100,从动齿轮21的齿数为23,齿轮压力角可选用α=20
°
,齿轮模数根据承载能力计算可取m=1,齿轮精度可选择7级。
61.实施例3
62.本发明还提供了一种水下无人装备单驱联动展开机构的展开方法,包括以下步骤:
63.s1、水下无人装备发射出管后,水下无人装备本体1呈垂直姿态,本体尾部3同步脱落,本体尾部3脱落产生的拉力通过定位插销拉脱绳4将定位插销24拉脱;
64.s2、在已施加预应力的涡轮弹簧23的作用下,主动齿轮22沿中心轴做圆周运动;
65.s3、在主动齿轮22的带动下,多个从动齿轮21沿自身轴心做圆周运动,带动伸展臂同步展开;
66.s4、当从动齿轮21旋转到设定角度后,锁定插销28在圆柱弹簧29的作用下嵌入从动齿轮21的限位孔内,驱使展开机构2工作结束。
67.更为具体的,将展开机构2工作结束后,平面多浆开始工作,根据需要,对水下无人装备进行推进、姿态调整和悬停控制。
68.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
69.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。