1.本实用新型涉及无人船技术领域,尤其涉及一种水上停机库和水上停机系统。
背景技术:
2.无人机和水下机器人,可以替代人在空中和水下执行各种任务。例如无人机被广泛应用于航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域。水下机器人,可替代蛙人进行水下搜救、考古、勘探、环境检测等作业。无人机可避免高空作业,水下机器人则可以避免蛙人在水下危险环境中涉险,在崇尚“以人为本,生命至上”的当今社会,两者均具有重要的应用价值。
3.现有技术中,无人机与水下机器人往往各自独立执行工作任务。其中,无人机受制于无人机的续航里程,在大面积水域巡航的无人机往往需要多次调整出发位置,才能完成对水域的完整巡航,费时费力。对于水下机器人,则需要在水域岸边放置卷线装置,用于卷放线缆,线缆与水下机器人相连,水下机器人浸入水中,通过线缆与电源和控制器相连,水下机器人的活动范围受限。
技术实现要素:
4.本实用新型的目的在于提供一种水上停机库,用于停放无人机并收放水下机器人,增加无人机和水下机器人的联动效果,并扩大无人机和水下机器人的活动范围。
5.本实用新型解决其技术问题是采用以下的技术方案来实现的。
6.一种水上停机库,用于停放无人机和收放水下机器人,包括控制器、船体、上机舱、下机舱、卷线装置和线缆,船体包括船底和船盖,船盖盖合在船底上,上机舱设置于船盖上,上机舱适于停放无人机,下机舱设置于船底内,卷线装置设置于下机舱内,下机舱适于容纳水下机器人,卷线装置适于通过线缆连接水下机器人,并适于对线缆进行卷收和卷放,控制器适于控制船体、上机舱、下机舱和卷线装置。
7.较佳地,水上停机库包括螺旋推进器,螺旋推进器设置于船体的底部。
8.较佳地,上机舱包括舱盖组件,舱盖组件设置于上机舱的上端面,舱盖组件适于开启或关闭上机舱。
9.较佳地,卷线装置包括骨架组件、电机组件、卷线筒组件和过线机构,电机组件、卷线筒组件和过线机构均安装于骨架组件,电机组件包括电机和主动轮,电机适于驱动主动轮转动,卷线筒组件包括第一从动轮和卷线筒,第一从动轮与卷线筒同轴设置,第一从动轮与卷线筒固定连接,卷线筒适于卷收线缆,主动轮适于带动第一从动轮转动,第一从动轮适于带动卷线筒转动,过线机构包括第二从动轮、丝杠和过线器,过线器适于线缆穿过,第二从动轮与丝杠固定连接,过线器与丝杠转动连接,过线器适于相对于丝杠转动,并适于随着丝杠沿着丝杠的轴线方向直线运动。
10.较佳地,丝杠为回转丝杠,过线器适于随着丝杠沿着丝杠的轴线方向直线往复运动。
11.较佳地,卷线筒适于卷收多层线缆,卷线筒卷收或者卷放线缆的动作与过线器沿着丝杠的轴线方向直线往复运动的动作相匹配,过线器沿着丝杠的轴线方向完成一直线往复运动,卷线筒对应完成两层线缆的卷收或者卷放动作。
12.较佳地,过线机构还包括两横向夹线滚轮和两纵向夹线滚轮,过线器上设置有穿线孔,穿线孔适于线缆穿过,两横向夹线滚轮相对设置于穿线孔外端的上下两侧,两纵向夹线滚轮相对设置于穿线孔内端的左右两侧,横向夹线滚轮沿着水平方向设置,纵向夹线滚轮沿着竖直方向设置,横向夹线滚轮和纵向夹线滚轮均适于夹紧线缆。
13.较佳地,过线机构还包括压力传感器,压力传感器和电机均与控制器电性相连,控制器适于控制电机的转动以控制卷线筒卷收或者卷放线缆,压力传感器适于感应线缆施加给压力传感器的压力以生成压力信号,并将压力信号传递给控制器,控制器适于在压力低于设定最低压力值时控制卷线筒卷收线缆,并适于在压力高于设定最高压力值时控制卷线筒卷放线缆。
14.较佳地,水上停机库还包括光电编码器、定位模块、通信模块和输入模块,光电编码器、定位模块、通信模块和输入模块均与控制器电性相连,光电编码器适于探测电机转动的圈数及方向以形成线缆卷收信息,并适于将线缆卷收信息传递给控制器,定位模块适于获取上机舱的位置信息,并适于将上机舱的位置信息传递给控制器,通信模块适于与水下机器人通信以获取水下机器人的位置信息,并适于将水下机器人的位置信息传递给控制器,输入模块适于输入水下机器人的目标位置信息,控制器适于根据卷线装置的位置信息、水下机器人的位置信息、线缆卷收信息以及水下机器人的目标位置信息控制卷线筒卷收或者卷放线缆。
15.本实用新型还提供一种水上停机系统,包括无人机、水下机器人和本实用新型提供的水上停机库。
16.本实用新型提供的水上停机库和水上停机系统,包括用于停放无人机的上机舱和用于收放水下机器人的下机舱,可实现无人机和水下机器人的联动,水上停机库可以在水面机动,在到达预定水面后再起降无人机,或者收放水下机器人,扩大了无人机和水下机器人的活动范围。
附图说明
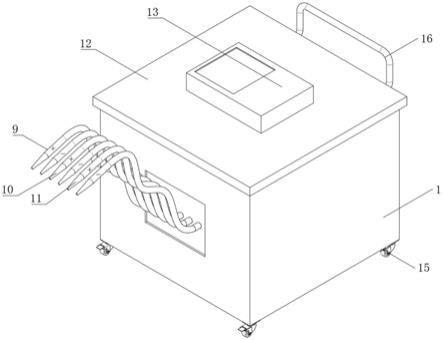
17.图1为本实用新型实施例提供的水上停机库的立体结构示意图。
18.图2为图1中水上停机库的后视图。
19.图3为图1中水上停机库的仰视图。
20.图4为图1中在舱门处于开启工况水上停机库与水下机器人配合的结构示意图。
21.图5为图1中上机舱的立体结构示意图。
22.图6为图4中卷线装置的立体结构示意图。
23.图7为图6中卷线装置的部分立体结构示意图。
24.图8为图6中骨架组件的立体结构示意图。
25.图9为图6中电机组件的立体结构示意图。
26.图10为图6中卷线筒组件的立体结构示意图。
27.图11为图6中过线机构的立体结构示意图。
28.图12为图11中过线器的左视图。
29.图13为图11中过线器的正视图。
30.图14为图11中过线器的后视图。
具体实施方式
31.为更进一步阐述本实用新型为达成预定实用新型目的所采取的技术方式及功效,以下结合附图及实施例,对本实用新型的具体实施方式、结构、特征及其功效,详细说明如后。
32.请参图1-图4,本实用新型实施例提供一种水上停机库100,用于停放无人机300和收放水下机器人500。
33.该水上停机库100包括控制器(图未示)、船体110、上机舱150、下机舱170、卷线装置180和线缆190。
34.该船体110包括船底111和船盖115,该船盖115盖合在该船底111上。该上机舱150设置于该船盖115上,该上机舱150适于停放该无人机300。该下机舱170设置于该船底111内,该卷线装置180设置于该下机舱170内,该下机舱170适于容纳该水下机器人500,该卷线装置180适于通过该线缆 190连接该水下机器人500,并适于对该线缆190进行卷收和卷放,该控制器适于控制该船体110、该上机舱150、该下机舱170和该卷线装置180。
35.本实用新型较佳实施例中,船体110包括密封防撞条115a,该密封防撞条115a沿着该船底111的上边沿设置。
36.可以理解,该密封防撞条115a沿着该船底111的上边沿设置,即沿着该船底111与该船盖115相衔接的边沿设置。一方面可以增强该船底111与该船盖115相衔接的边沿的密封效果;另一方面,由于密封防撞条115a较为柔软,在水上停机库100靠岸或者与障碍物碰撞时,可以起到缓冲作用,保护水上停机库100。
37.本实用新型较佳实施例中,船体110包括螺旋推进器113,该螺旋推进器 113设置于该船体110的底部。
38.可以理解,本实用新型较佳实施例中,该螺旋推进器113与控制器电性相连,该控制器适于通过控制该螺旋推进器113的转动以控制该船体110的运动。
39.本实用新型较佳实施例中,船体110包括两个螺旋推进器113,两个该螺旋推进器113分别设置于该船体110的后部的左右两侧。
40.本实用新型较佳实施例中,船体110包括推进器防护罩113a,该推进器防护罩113a安装于该船体10的底部,该推进器防护罩113a与该船体10的底部围合形成该螺旋桨推进器12的容纳空间。
41.本实用新型较佳实施例中,该推进器防护罩113a为镂空结构。
42.本实用新型较佳实施例中,该船体110包括雷达119,该雷达119适于探测该船体110的前方的障碍物。
43.本实用新型较佳实施例中,该船体110包括摄像头117,该摄像头117 适于拍摄该船体110周围的图像。
44.本实用新型较佳实施例中,该船体110包括探照灯118。
45.本实用新型较佳实施例中,该船体110包括通讯天线116a,该通讯天线 116a与该
控制器电性相连,该控制器适于通过该通讯天线116a与服务器通信。
46.本实用新型较佳实施例中,该船体110包括遥控天线116b,该遥控天线 116b与该控制器电性相连,该控制器适于通过该遥控天线116b与遥控器通信。
47.本实用新型较佳实施例中,该雷达119、该摄像头117、该探照灯118、该通讯天线116a和该遥控天线116b均设置于该船盖115上。
48.本实用新型较佳实施例中,船体110包括风雨传感器120,该风雨传感器120适于探测环境的风向、风速和降雨量。
49.本实用新型较佳实施例中,该雷达119、该摄像头117、该探照灯118和该风雨传感器120均与控制器电性相连,均适于向控制器传递数据,并受该控制器控制。
50.请参图5,本实用新型较佳实施例中,该上机舱150包括舱盖组件151,该舱盖组件151设置于该上机舱150的上端面,该舱盖组件151适于盖合该上机舱150。
51.本实用新型较佳实施例中,该舱盖组件151包括左舱盖151a、右舱盖 151b、舱盖滑轨151c和舱盖电机,该舱盖滑轨151c固定设置于该上机舱150 上端面的两侧,该左舱盖151a、该右舱盖151b均与该舱盖滑轨151c滑动连接,该左舱盖151a和该右舱盖151b适于通过沿着该舱盖滑轨151c滑动以盖合该上机舱150,该舱盖电机适于驱动该左舱盖151a和该右舱盖151b沿着该舱盖滑轨151c滑动。
52.本实用新型较佳实施例中,该上机舱150包括停机平台153和升降机构 (图未示),该停机平台153适于停放该无人机300,该升降机构的下端与该上机舱150的下底板连接,该升降机构的上端与该停机平台153连接,该升降机构适于带动该停机平台153进行升降运动。
53.本实用新型较佳实施例中,该上机舱150包括货架155和无人机电池157,该货架155设置于该上机舱150内,该无人机电池157适于放置于该货架155。
54.本实用新型较佳实施例中,该上机舱150包括充电组件(图未示),该充电组件适于给该无人机电池157充电。
55.本实用新型较佳实施例中,该上机舱150包括机械手(图未示),该机械手适于将该无人机电池157从该无人机300上拆卸,或者将该无人机电池 157安装至该无人机300。
56.如图3和图4所示,本实用新型较佳实施例中,该下机舱170包括舱门组件171,该舱门组件171设置于该船底111的底面,该舱门组件171适于开启或者关闭该下机舱170。
57.可以理解,该舱门组件171可以包括左舱门(图未示)、右舱门(图未示)、舱门滑轨(图未示)和舱门电机(图未示),该舱门滑轨固定设置于该下机舱170的下端面的两侧,该左舱门、该右舱门均与该舱门滑轨滑动连接,该舱门电机适于驱动该左舱门和该右舱门沿着该舱门滑轨滑动,该左舱门和该右舱门适于沿着该舱门滑轨滑动以盖合或开启该下机舱170。
58.可以理解,该舱门电机与控制器电性相连,控制器适于通过控制该舱门电机以控制该舱门组件171的开启和闭合。
59.本实用新型较佳实施例中,该下机舱170与该船底111其他部分之间采用密封设计,在该水上停机库100放置于水中时,水浸入该下机舱170时无法渗入该船底111内部,从而保证该水上停机库100具有足够的浮力。
60.本实用新型较佳实施例中,在该水上停机库100放置于水中时,该舱门组件171浸
入水中,从而保证在该舱门组件171开启时,该水下机器人500 在浮力作用下缓慢浸入水中,避免损伤该水下机器人500。
61.请参图6-图7,本实用新型较佳实施例中,该卷线装置180包括骨架组件10、电机组件30、卷线筒组件50和过线机构70,该电机组件30、该卷线筒组件50和该过线机构70均安装于该骨架组件10。
62.如图7所示,本实用新型较佳实施例中,该电机组件30包括电机31和主动轮33,该电机31适于驱动该主动轮33转动。该卷线筒组件50包括第一从动轮51和卷线筒53,该第一从动轮51与该卷线筒53同轴设置,该第一从动轮51与该卷线筒53固定连接,该卷线筒53适于卷收线缆190,该主动轮33适于带动该第一从动轮51转动,该第一从动轮51适于带动该卷线筒 53转动。该过线机构70包括第二从动轮71、丝杠77和过线器79,该过线器79适于线缆190穿过,该第二从动轮71与该丝杠77固定连接,该过线器79与该丝杠77转动连接,该过线器79适于相对于该丝杠77转动,并适于随着该丝杠77沿着该丝杠77的轴线方向直线运动。
63.可以理解,电机31同时带动卷线筒53和第二从动轮71转动,第二从动轮71带动过线器79直线运动,过线器79与卷线筒53之间相互配合,实现对线缆190的自动化卷收和卷放,自动化程度高。
64.请参图9,本实用新型较佳实施例中,该电机31固定设置于该骨架组件 10,该主动轮33与该电机31的转轴固定连接,该主动轮33适于随着该转轴转动。
65.请参图8,本实用新型较佳实施例中,该骨架组件10包括相对设置的左轴承座11和右轴承座13,该卷线筒组件50的两端分别与该左轴承座11和该右轴承座13转动连接。
66.请参图10,本实用新型较佳实施例中,该卷线筒组件50还包括链条52,该主动轮33和该第一从动轮51均为链轮,该链条52套设于主动轮33和该第一从动轮51,该主动轮33适于通过该链条52带动该第一从动轮51转动。
67.本实用新型较佳实施例中,该卷线筒53适于卷收多层线缆190。
68.请再参图8,本实用新型较佳实施例中,该骨架组件10还包括丝杠轴承座17,该丝杠77的一端与该丝杠轴承座17转动连接,另一端与该骨架组件 10固定连接。
69.请参图11,本实用新型较佳实施例中,该丝杠77为回转丝杠,该过线器79适于随着该丝杠77沿着该丝杠77的轴线方向直线往复运动。
70.本实用新型较佳实施例中,该卷线筒53卷收或者卷放线缆190的动作与该过线器79沿着该丝杠77的轴线方向直线往复运动的动作相匹配,该过线器79沿着该丝杠77的轴线方向完成一直线往复运动,该卷线筒53对应完成两层线缆190的卷收或者卷放动作。
71.可以理解,该卷线筒53卷收或者卷放线缆190的动作与该过线器79沿着该丝杠77的轴线方向直线往复运动的动作相匹配,使得线缆190在收放过程中始终处于绷紧状态,避免线缆190相互缠绕,保证了线缆190收放过程的顺利进行。
72.本实用新型较佳实施例中,该过线机构70还包括主动齿轮72和从动齿轮73,该主动齿轮72与该第一从动轮51同轴设置,该主动齿轮72与该第一从动轮51固定连接,该主动齿轮72与该第一从动轮51同步转动,该主动齿轮72与该从动齿轮73之间齿轮配合,该主动齿轮72适于带动该从动齿轮 73转动。
73.本实用新型较佳实施例中,该过线机构70还包括中继转动轮74,该中继转动轮74与该从动齿轮73同轴设置,该中继转动轮74与该从动齿轮73 固定连接,该中继转动轮74与
该从动齿轮73同步转动,该中继转动轮74适于带动该第二从动轮71转动。
74.本实用新型较佳实施例中,该过线机构70还包括皮带75,该中继转动轮74和该第二从动轮71均为皮带轮,该皮带75套设于该中继转动轮74和该第二从动轮71,该中继转动轮74适于通过该皮带75带动该第二从动轮71 转动。
75.请再参图8,本实用新型较佳实施例中,该主动齿轮72、该从动齿轮73 和该中继转动轮74均与该左轴承座11转动连接。
76.请参图12-图14,本实用新型较佳实施例中,该过线器79上设有丝杠孔79a,该丝杠孔79a适于容纳该丝杠77。
77.本实用新型较佳实施例中,该过线机构70还包括导向轴78,该导向轴 78的两端分别与该骨架组件10固定连接,该过线器79上设置有导向孔79b,该导向孔79b套设于该导向轴78,该过线器79适于沿着该导向轴78滑动。
78.本实用新型较佳实施例中,该过线机构70还包括两横向夹线滚轮81和两纵向夹线滚轮83,该过线器79上设置有穿线孔79c,该穿线孔79c适于线缆190穿过,两该横向夹线滚轮81相对设置于该穿线孔79c外端的上下两侧,两该纵向夹线滚轮83相对设置于该穿线孔79c内端的左右两侧,该横向夹线滚轮81沿着水平方向设置,该纵向夹线滚轮83沿着竖直方向设置,该横向夹线滚轮81和该纵向夹线滚轮83均适于夹紧线缆190。
79.本实用新型较佳实施例中,该过线机构70还包括四组弹簧(图未示),两组该弹簧分别设置于两该横向夹线滚轮81与该过线器79之间,另外两组该弹簧分别设置于两纵向夹线滚轮83与该过线器79之间,该横向夹线滚轮 81和该纵向夹线滚轮83均适于在该弹簧的弹力作用下夹紧线缆190。
80.本实用新型较佳实施例中,该横向夹线滚轮81和该纵向夹线滚轮83均适于在该弹簧的弹力作用下夹紧线缆190,在施加在线缆190上的拉力超过预定拉力时,线缆190从该过线机构70拉出。
81.可以理解,由于该横向夹线滚轮81和该纵向夹线滚轮83均适于在该弹簧的弹力作用下夹紧线缆190,在施加在线缆190上的拉力超过预定拉力时,线缆190从该过线机构70拉出,一方面使得线缆190处于绷紧状态,避免缠绕;另一方面,线缆190可以随水下机器人500的运动而卷放,提高了自动化程度。
82.本实用新型较佳实施例中,该电机31与水上停机库100的控制器电性相连,该控制器适于控制该电机31的转动,以控制该卷线筒53卷收或者卷放线缆190。
83.本实用新型较佳实施例中,该过线机构70还包括压力传感器(图未示),该压力传感器适于感应线缆190施加给该压力传感器的压力,该压力传感器与该控制器电性连接,该压力传感器适于将压力信号传递给该控制器,该控制器适于在该压力低于设定最低压力值时控制该卷线筒53卷收线缆190,并适于在该压力高于设定最高压力值时控制该卷线筒53卷放线缆190。
84.可以理解,设置压力传感器(图未示),该控制器适于在该压力低于设定最低压力值时控制该卷线筒53卷收线缆190,并适于在该压力高于设定最高压力值时控制该卷线筒53卷放线缆190,在水下机器人500远离卷线装置时,线缆190随着水下机器人500的运动自动卷放;在水下机器人500取近卷线装置时,线缆190随着水下机器人500的运动自动卷收,提高了卷线装置的自动化程度。
85.本实用新型较佳实施例中,设置于下侧的该横向夹线滚轮81设置有该压力传感器。
86.本实用新型较佳实施例中,水上停机库100还包括光电编码器(图未示),该光电编码器与该控制器电性相连,该光电编码器适于探测该电机31转动的圈数及方向以形成线缆190卷收信息,并适于将线缆190卷收信息传递给该控制器。
87.本实用新型实施例还提供一种水上停机系统,包括无人机300、水下机器人500和本实用新型实施例提供的水上停机库100。
88.本实用新型实施例提供的水上停机库和水上停机系统,包括用于停放无人机的上机舱和用于收放水下机器人的下机舱,可实现无人机和水下机器人的联动,水上停机库可以在水面机动,在到达预定水面后再起降无人机,或者收放水下机器人,扩大了无人机和水下机器人的活动范围。
89.在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
90.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
91.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
92.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。