1.本实用新型涉及一种农业机器人,具体涉及一种深度便于控制的水下检测农业机器人。
背景技术:
2.农业机器人在水产养殖和水下有害生物探测等方面有诸多作用。例如:如何清除过多的清道夫一直是渔牧界关注的问题,目前最常采用的是人工探测与清理法。由渔民亲自下水记录清道夫的分布并清除过多的清道夫。人工耗时耗力且成本较高,对于渔民来说亲自下水也有较大的危险,不利于产生更多的经济效益。
3.为解决上述问题,本实用新型提供一种新的探测方法。
技术实现要素:
4.本实用新型一种深度便于控制的水下检测农业机器人,它的特点是深度便于控制,能够探测并识别所拍摄物种数量与分布状况,具有体积小巧、便于移动与操作的特点。
5.所述深度便于控制的水下检测农业机器人,由摄像头、机舱、机舱盖、推进器、单片机、电池、蜂鸣器和储备仓组成。
6.所述推进器通过螺栓固定在机舱上。
7.所述摄像头与蜂鸣器通过固定胶固定在机舱内。
8.所述机舱盖和机舱配合形成密闭的空间。
9.所述电池、单片机固定在机舱内。
10.所述推进器由左推进器、右推进器、前推进器和后推进器组成。
11.进一步地,所述深度便于控制的水下检测农业机器人的前进速度大小可以调节,具体通过单片机调整左推进器和右推进器转速实现。
12.进一步地,所述深度便于控制的水下检测农业机器人可以实现探测警报一体化,具体通过摄像头、蜂鸣器与单片机实现。
13.进一步地,所述深度便于控制的水下检测农业机器人可以识别所探测生物的种类与分布情况,具体单片机基于摄像头采集的生物信息与坐标点识别。
14.进一步地,所述深度便于控制的水下检测农业机器人可以实现不同深度的下潜与上升,具体为:当下潜深度不超过机舱自身高度时,通过前推进器和后推进器旋转进而产生的浮力实现;当下潜深度超过机舱自身高度时,除前推进器和后推进器工作外,还需通过储备仓抽排水改变机器人自重实现。
15.进一步地,所述深度便于控制的水下检测农业机器人可以灵活转向,具体通过单片机调整左推进器和右推进器的转速产生转速差,进而实现机器人的转向。
附图说明:
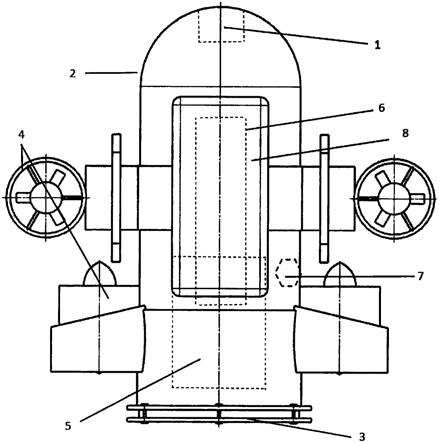
16.图1是本实用新型深度便于控制的水下检测农业机器人的俯视图。
17.图2是本实用新型探测水下生物的智能机器人的轴测图。
18.图中:1、摄像头;2、机舱;3、机舱盖;4、推进器;41、左推进器;42、右推进器;43、前推进器;44、后推进器;5、单片机,6、电池,7、蜂鸣器;8、储备仓。
具体实施方式:
19.结合图1和图2对本实用新型一种深度便于控制的水下检测农业机器人的结构特征进行说明。一种深度便于控制的水下检测农业机器人由摄像头1、机舱2、机舱盖3、推进器4、单片机5、电池6、蜂鸣器7和储备仓8组成;推进器4通过螺栓固定在机舱2上;摄像头1与蜂鸣器7通过固定胶固定在机舱2内;机舱盖3和机舱2配合形成密闭的空间;电池6、单片机5固定在机舱2内;推进器4由左推进器41、右推进器42、前推进器43和后推进器44组成。
20.结合图1和图2对本实用新型一种深度便于控制的水下检测农业机器人的工作原理进行说明。单片机(5)基于摄像头(1)拍摄的生物和位置信息识别所探测生物的种类与分布情况;当下潜深度不超过机舱(2)自身高度时,通过前推进器(43)和后推进器(44)工作进而产生的浮力实现;当下潜深度超过机舱(2)自身高度时,除前推进器(43)和后推进器(44)工作外,还需通过储备仓(8)抽排水改变机器人自重实现;当单片机(5)识别到所探测生物时,蜂鸣器(7)报警;机器人的前进速度和转向通过单片机(5)调整左推进器和(41)右推进器(42)转速实现。
21.以上对本实用新型做了详尽的描述,其目的在于让熟悉此领域技术的人士能够了解本发明的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型的实质所作的等效变化或修改,都应涵盖在本实用新型的保护范围内。
技术特征:
1.一种深度便于控制的水下检测农业机器人,其特征在于:由摄像头(1)、机舱(2)、机舱盖(3)、推进器(4)、单片机(5)、电池(6)、蜂鸣器(7)和储备仓(8)组成;所述推进器(4)通过螺栓固定在机舱(2)上;所述摄像头(1)与蜂鸣器(7)通过固定胶固定在机舱(2)内;所述机舱盖(3)和机舱(2)配合形成密闭的空间;所述电池(6)、单片机(5)固定在机舱(2)内;所述推进器(4)由左推进器(41)、右推进器(42)、前推进器(43)和后推进器(44)组成。2.根据权利要求1所述的深度便于控制的水下检测农业机器人,其特征在于:前进速度大小可以调节,具体通过单片机(5)调整左推进器(41)和右推进器(42)转速实现。3.根据权利要求1所述的深度便于控制的水下检测农业机器人,其特征在于:可以实现探测警报一体化,具体通过摄像头(1)、蜂鸣器(7)与单片机(5)实现。4.根据权利要求1所述的深度便于控制的水下检测农业机器人,其特征在于:可以识别所探测生物的种类与分布情况,具体单片机(5)基于摄像头(1)采集的生物信息与坐标点识别。5.根据权利要求1所述的深度便于控制的水下检测农业机器人,其特征在于:可以实现不同深度的下潜与上升,具体为:当下潜深度不超过机舱(2)自身高度时,通过前推进器(43)和后推进器(44)旋转进而产生的浮力实现;当下潜深度超过机舱(2)自身高度时,除前推进器(43)和后推进器(44)工作外,还需通过储备仓(8)抽排水改变机器人自重实现。6.根据权利要求1所述的深度便于控制的水下检测农业机器人,其特征在于:可以灵活转向,具体通过单片机(5)调整左推进器(41)和右推进器(42)的转速产生转速差,进而实现机器人的转向。
技术总结
本实用新型一种深度便于控制的水下检测农业机器人,属于农业机器人领域。主要由摄像头、机舱、机舱盖、推进器、单片机、电池、蜂鸣器和储备仓组成。单片机通过控制推进器的转速实现本实用新型前进、转向和下潜;单片机基于摄像头采集的生物信息与坐标点识别所探测生物种类与分布状况,并通过蜂鸣器报警。本实用新型具有节能环保,操作简单的优点,探测方便,能减少人力物力的消耗,改善环境并提高经济效益。益。益。
技术研发人员:张彬彬 韩鹏泽 王可硕 张元汲 廖一钒 李守太 杨明金 刘得雄 杨玲
受保护的技术使用者:西南大学
技术研发日:2021.09.17
技术公布日:2022/4/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
