1.本实用新型涉及自动化机器人技术领域,特别涉及一种配网线路走线装置及其树障清除机器人。
背景技术:
2.树障清除机器人通常通过卷扬装置或者人工的方式完成配网线路上挂任务,而悬挂在配网线路上的树障清除机器人通过走线装置在配网线路上行进,当配网线路出现一定坡度或弯曲时,现有的走线装置在途径时容易出现打滑和晃动的问题,若坡度较大的配网线路段时容易出现脱轨的问题,存在一定的安全隐患。
3.可见,现有技术还有待改进和提高。
技术实现要素:
4.鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种配网线路走线装置及其树障清除机器人,其可防止配网线路走线装置在行走时发生打滑的问题,且可自适应配网线路坡度,使走线装置始终与配网线路贴合。
5.为了达到上述目的,本实用新型采取了以下技术方案:
6.一种配网线路走线装置,包括座板,所述座板的两侧分布有若干可相对抱合的走线臂,所述走线臂的底部与所述座板铰接,所述走线臂的内侧设置有升降机构,所述升降机构上设置有可往两侧摆动的压线机构,所述压线机构与所述升降机构传动连接。
7.所述的配网线路走线装置中,所述走线臂包括摆动架、走线轮和旋转电机,所述走线轮设置在所述摆动架的顶部,所述旋转电机设置在所述摆动架的顶部外侧,并且所述旋转电机的输出轴与所述走线轮固连;所述升降机构设置在所述摆动架的内侧。
8.所述的配网线路走线装置中,还包括推拉机构,所述推拉机构设置在所述摆动架的外侧,所述推拉机构的底部与所述座板铰接,所述推拉机构的输出轴与所述摆动架铰接。
9.所述的配网线路走线装置中,所述升降机构包括丝杆和升降电机,所述丝杆设置在所述摆动架的内侧,且所述丝杆的两端分别与所述摆动架转动连接,所述升降电机设置在所述摆动架的内侧底部,所述升降电机的输出轴通过联轴器与所述丝杆连接;所述压线机构设置在所述丝杆上,且与所述丝杆传动连接。
10.所述的配网线路走线装置中,所述压线机构包括滑座,所述滑座与所述丝杆传动连接,所述滑座上设置有可往两侧摆动的压线架,所述压线架的两侧分别设置有压线轮。
11.所述的配网线路走线装置中,所述压线架的底部设置有转动块,所述滑座的顶部设置有与所述转动块配合连接的转动槽。
12.所述的配网线路走线装置中,所述丝杆的两侧分别设置有导滑杆,所述导滑杆的两端分别与所述摆动架固连,所述滑座的两侧与两根所述导滑杆配合连接。
13.本实用新型还提供一种树障清除机器人,包括如上所述的配网线路走线装置。
14.有益效果:
15.本实用新型提供了一种配网线路走线装置,在使用时,通过若干所述走线臂向配网线路抱合,使树障清除机器人悬挂在配网线路上;当所述走线臂完成抱合动作后,所述升降机构驱动所述压线机构上升,使所述压线机构抵压在配网线路的底部,从而使配网线路夹紧在所述走线臂和所述压线机构之间,提高了所述走线臂与配网线路之间的传动效率,防止所述走线臂发生打滑的问题,当配网线路出现斜坡和弯曲段时,所述压线机构则根据斜坡的角度或弯曲段的角度自适应左右摆动,使所述压线机构可始终与配网线路保持贴合状态,从而保证所述走线臂与配网线路之间的传动效率。
附图说明
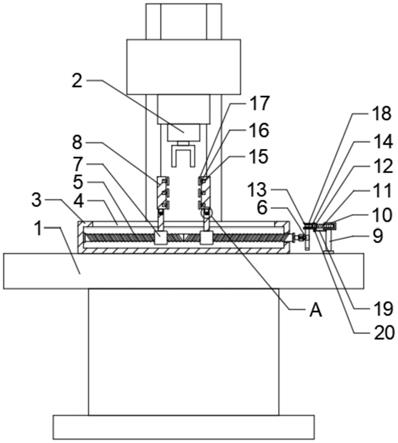
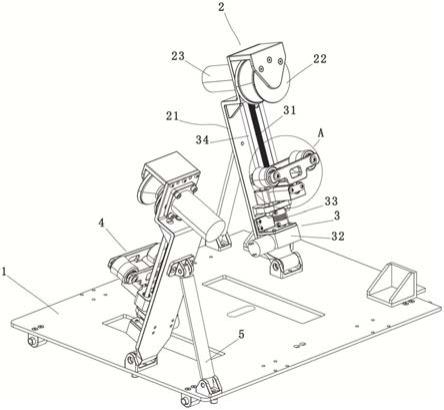
16.图1为本实用新型提供的配网线路走线装置的整体结构示意图;
17.图2为图1中a区域的放大示意图。
18.主要元件符号说明:1-座板、2-走线臂、3-升降机构、4-压线机构、5-推拉机构、21-摆动架、22-走线轮、23-旋转电机、31-丝杆、32-升降电机、33-联轴器、34-导滑杆、41-滑座、42-压线架、43-压线轮、44-转动块、45-转动槽。
具体实施方式
19.本实用新型提供供一种配网线路走线装置及其树障清除机器人,为使本实用新型的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
20.在本实用新型的描述中,需要理解的是,术语“中部”、“内侧”、“外侧”等指示的方位或位置关系为本实用新型基于附图的方位或位置关系,仅是为了便于描述本实用新型和简化描述。另外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。
21.请参阅图1和图2,本是实用新型提供一种配网线路走线装置,包括座板1,所述座板1的两侧分布有若干可相对抱合的走线臂2,所述走线臂2的底部与所述座板1铰接,所述走线臂2的内侧设置有升降机构3,所述升降机构3上设置有可往两侧摆动的压线机构4,所述压线机构4与所述升降机构3传动连接。
22.在实际使用时,本装置属于树障清除机器人的一部分,在使用时需安装在树障清除机器人上配合使用,树障清除机器人还包括卷扬装置;当树障清除机器人通过卷扬装置爬升至配网线路下方时,若干所述走线臂2向配网线路抱合,使树障清除机器人悬挂在配网线路上,所述走线臂2使树障清除机器人可沿配网线路移动对配网线路周围的树障进行清理;当所述走线臂2完成抱合动作后,所述升降机构3驱动所述压线机构4上升,使所述压线机构4抵压在配网线路的底部,从而使配网线路夹紧在所述走线臂2和所述压线机构4之间,提高了所述走线臂2与配网线路之间的传动效率,防止所述走线臂2发生打滑的问题,当配网线路出现斜坡和弯曲段时,所述压线机构4则根据斜坡的角度或弯曲段的角度自适应左右摆动,使所述压线机构4可始终与配网线路保持贴合状态,从而保证所述走线臂2与配网线路之间的传动效率。
23.如图1和图2所示,进一步地,所述走线臂2包括摆动架21、走线轮22和旋转电机23,
所述走线轮22设置在所述摆动架21的顶部,所述旋转电机23设置在所述摆动架21的顶部外侧,并且所述旋转电机23的输出轴与所述走线轮22固连;所述升降机构3设置在所述摆动架21的内侧;通过所述摆动架21实现所述走线臂2的抱合动作,在所述走线臂2抱合配网线路时,所述走线轮22抵压在配网线路的顶部,并通过所述旋转电机23驱动旋转,且沿配网线路方向行走。
24.如图1所示,进一步地,所述的配网线路走线装置还包括推拉机构5,所述推拉机构5设置在所述摆动架21的外侧,所述推拉机构5的底部与所述座板1铰接,所述推拉机构5的输出轴与所述摆动架21铰接;通过所述推拉机构5伸缩输出轴来控制所述走线臂2的摆动幅度,从而实现所述走线臂2对配网线路的抱合动作;在一个实施方式中,所述推拉机构5为伸缩气缸。
25.如图1所示,进一步地,所述升降机构3包括丝杆31和升降电机32,所述丝杆31设置在所述摆动架21的内侧,且所述丝杆31的两端分别与所述摆动架21转动连接,所述升降电机32设置在所述摆动架21的内侧底部,所述升降电机32的输出轴通过联轴器33与所述丝杆31连接;所述压线机构4设置在所述丝杆31上,且与所述丝杆31传动连接;通过所述升降电机32带动所述丝杆31转动,使所述压线机构4可沿所述丝杆31上下移动,从而实现所述压线机构4的压线动作。
26.如图2所示,进一步地,所述压线机构4包括滑座41,所述滑座41与所述丝杆31传动连接,所述滑座41上设置有可往两侧摆动的压线架42,所述压线架42的两侧分别设置有压线轮43;所述滑座41可沿所述丝杆31上下滑动,实现所述压线机构4的升降动作;通过两个所述压线轮43分别抵压配网线路的底部两侧,提高了所述走线轮22与配网线路之间的摩擦力,从而提高所述走线轮22与配网线路的传动效率,并且所述压线架42可根据配网线路的倾斜角度自适应调节两个压线轮43的抵压角度,使两个压线轮43可始终与配网线路保持贴合状态,保证所走线轮22与配网线路之间的传动效率。
27.如图2所示,进一步地,所述压线架42的底部设置有转动块44,所述滑座41的顶部设置有与所述转动块44配合连接的转动槽45;通过所述转动块44和所述转动槽45配合实现所述压线架42的摆动。
28.如图1和图2所示,进一步地,所述丝杆31的两侧分别设置有导滑杆34,所述导滑杆34的两端分别与所述摆动架21固连,所述滑座41的两侧与两根所述导滑杆34配合连接;通过所述导滑杆34限制所述滑座41的滑动方向,提高了所述滑座41滑动的可靠性。
29.本实用新型还提供一种树障清除机器人,包括如上所述的配网线路走线装置。
30.综上所述,在使用时,通过若干所述走线臂2向配网线路抱合,使树障清除机器人悬挂在配网线路上;当所述走线臂2完成抱合动作后,所述升降机构3驱动所述压线机构4上升,使所述压线机构4抵压在配网线路的底部,从而使配网线路夹紧在所述走线臂2和所述压线机构4之间,提高了所述走线臂2与配网线路之间的传动效率,防止所述走线臂2发生打滑的问题,当配网线路出现斜坡和弯曲段时,所述压线机构4则根据斜坡的角度或弯曲段的角度自适应左右摆动,使所述压线机构4可始终与配网线路保持贴合状态,从而保证所述走线臂2与配网线路之间的传动效率。
31.可以理解的是,对本领域普通技术人员来说,可以根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,而所有这些改变或替换都应属于本实用新型所附的
权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。