1.本实用新型涉及探针端子焊接技术领域,尤其涉及一种带定位功能的探针端子自动焊接机。
背景技术:
2.焊接就是运用各种可熔的合金联接金属部件的进程,而科技的发展使得焊接过程也愈加智能化,其中在探针端子生产过程中,往往会使用到自动焊接机来完成相应的焊接作业。
3.相关技术中,通常将探针端子放置在电动滑轨工作台上,由机械化智能完成移动、焊接等工序。
4.但是,在移动和焊接过程中,探针端子往往会受到装置工作产生的震感或焊接头移动的外力导致其发生微小偏移,从而导致后续焊接作业时,电脑程序预设的焊接点与实际焊接点产生位移,进而导致焊接误差,甚至导致部分焊接点的报废,进而使得需要人工拆除焊接点并进行二次焊接,大大降低的焊接效率。
5.因此,有必要提供一种新的带定位功能的探针端子自动焊接机,以解决上述技术问题。
技术实现要素:
6.本实用新型提供一种带定位功能的探针端子自动焊接机,解决了相关技术中,移动或焊接过程中,探针端子会受外力而位移,进而导致焊接误差,甚至导致探针端子焊接的失败的技术问题。
7.为解决上述技术问题,本实用新型提供的带定位功能的探针端子自动焊接机包括:
8.底座;
9.机体,所述机体安装在所述底座顶端的一端;
10.plc控制器,所述plc控制器安装在所述机体一侧的上端;
11.驱动箱,所述驱动箱滑动连接在所述机体的顶端;
12.气动伸缩杆,所述气动伸缩杆安装在所述驱动箱的底端;
13.焊接头,所述焊接头安装在所述气动伸缩杆的输出端;
14.滑轨工作台,所述滑轨工作台安装在所述底座顶端的中间位置处;
15.定位结构,所述定位结构设置在所述滑轨工作台的内部,所述定位结构还包括正反螺纹杆,所述正反螺纹杆转动连接在滑轨工作台内部底端的两端,且正反螺纹杆表面的两侧螺纹连接有螺纹块,所述螺纹块顶端竖向安装有延伸至滑轨工作台外部的定位板,且定位板的一侧安装有橡胶垫,所述滑轨工作台一侧的中间位置处安装有第一伺服电机,且第一伺服电机的输出端通过皮带与正反螺纹杆一端连接;
16.清洁箱,所述清洁箱安装在所述底座顶端一侧的一端;
17.清洁机构,所述清洁机构设置在所述清洁箱内部的上端,所述清洁机构还包括清洁罩、环形槽、主动齿轮、第二伺服电机、从动齿轮、清洁棉和辅助块,所述环形槽环形开设在清洁箱内部的上端,且环形槽一端的清洁箱内部上端设置有清洁罩,所述清洁罩表面四周顶端等角度安装有与环形槽相配合的辅助块,且清洁罩内部下端的两侧安装有清洁棉,所述清洁罩表面的下端安装有从动齿轮,且清洁罩一侧的清洁箱一侧上端安装有第二伺服电机,所述第二伺服电机输出端安装有与从动齿轮相啮合的主动齿轮。
18.优选地,所述焊接头和清洁箱的中心线处于同一水面线内,且清洁箱顶端横截面的面积大于焊接头横截面的面积。
19.优选地,所述清洁罩的形状为圆台型,且清洁罩顶端横截面的直径大于清洁罩顶端横截面的直径。
20.优选地,所述环形槽和辅助块的形状为凸型,且辅助块等角度分布有四个。
21.优选地,所述清洁箱内部的下端安装有收集罩,且清洁箱内部的底端等间距转动连接有滚轮,所述滚轮顶端的清洁箱内部下端设置有收集槽。
22.优选地,所述限位槽的宽度等于定位板的宽度,且限位槽关于滑轨工作台的竖向中轴线对称分布。
23.优选地,所述橡胶垫的形状为梯形,且橡胶垫横截面的覆盖面积小于定位板横截面的面积。
24.与相关技术相比较,本实用新型提供的带定位功能的探针端子自动焊接机具有如下有益效果:
25.本实用新型提供有正反螺纹杆、定位板、螺纹块和橡胶垫,通过启动第一伺服电机,利用皮带带动正反螺纹杆转动,使得螺纹块随之移动带动定位板同步往探针端子方向移动,进而通过橡胶垫将探针端子两侧进行夹持限定,同时由于定位板的同步运动,使得橡胶垫推动探针端子处于滑轨工作台正中央位置处,且可保证加工焊接时,探针端子不会受外力而位移,进而避免与plc控制器内部预设焊接点位置发生误差,实现探针端子的定位焊接,保证其焊接加工的精度,避免因位移导致焊接的误差,严重时导致焊接的失败。
附图说明
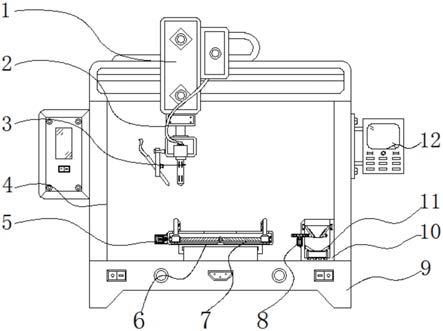
26.图1为本实用新型带定位功能的探针端子自动焊接机的正视剖面结构示意图;
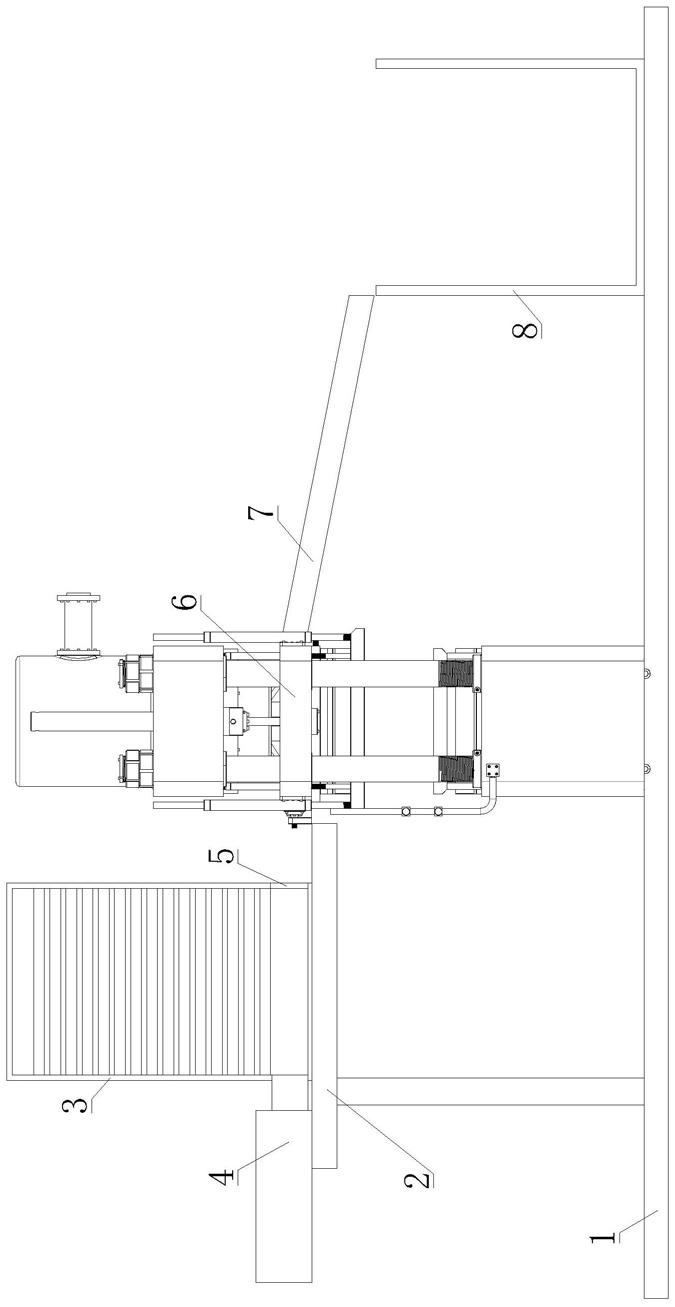
27.图2为本实用新型带定位功能的探针端子自动焊接机的侧视剖面结构示意图;
28.图3为本实用新型的滑轨工作台处俯视剖面结构示意图;
29.图4为本实用新型的清洁箱处正视结构示意图;
30.图5为本实用新型的清洁箱处底端俯视结构示意图。
31.图中:
32.1、驱动箱;2、气动伸缩杆;3、焊接头;4、机体;5、第一伺服电机;6、滑轨工作台;7、正反螺纹杆;
33.8、清洁机构;801、清洁罩;802、环形槽;803、主动齿轮;804、第二伺服电机;805、从动齿轮;806、清洁棉;807、辅助块;
34.9、底座;10、清洁箱;11、收集罩;12、plc控制器;13、定位板;14、收集槽;15、限位槽;16、螺纹块;17、橡胶垫;18、滚轮。
具体实施方式
35.下面结合附图和实施方式对本实用新型作进一步说明。
36.请结合参阅图1、图2、图3、图4和图5,其中,图1为本实用新型带定位功能的探针端子自动焊接机的正视剖面结构示意图;图2为本实用新型带定位功能的探针端子自动焊接机的侧视剖面结构示意图;图3为本实用新型的滑轨工作台处俯视剖面结构示意图;图4为本实用新型的清洁箱处正视结构示意图;图5为本实用新型的清洁箱处底端俯视结构示意图。
37.带定位功能的探针端子自动焊接机包括:
38.底座9;
39.机体4,机体4安装在底座9顶端的一端;
40.plc控制器12,plc控制器12安装在机体4一侧的上端,该plc控制器12的型号可为fx3sa-10mt-cm;
41.驱动箱1,驱动箱1滑动连接在机体4的顶端;
42.气动伸缩杆2,气动伸缩杆2安装在驱动箱1的底端,该气动伸缩杆2的型号可为xtl100;
43.焊接头3,焊接头3安装在气动伸缩杆2的输出端;
44.滑轨工作台6,滑轨工作台6安装在底座9顶端的中间位置处;
45.定位结构,定位结构设置在滑轨工作台6的内部,定位结构还包括正反螺纹杆7,正反螺纹杆7转动连接在滑轨工作台6内部底端的两端,且正反螺纹杆7表面的两侧螺纹连接有螺纹块16,螺纹块16顶端竖向安装有延伸至滑轨工作台6外部的定位板13,且定位板13的一侧安装有橡胶垫17,滑轨工作台6一侧的中间位置处安装有第一伺服电机5,该第一伺服电机5的型号可为f-3420-1,且第一伺服电机5的输出端通过皮带与正反螺纹杆7一端连接;
46.限位槽15的宽度等于定位板13的宽度,且限位槽15关于滑轨工作台6的竖向中轴线对称分布;
47.橡胶垫17的形状为梯形,且橡胶垫17横截面的覆盖面积小于定位板13横截面的面积;
48.具体地,如图1、图2和图3所示,启动第一伺服电机5,利用皮带带动正反螺纹杆7转动,使得螺纹块16随之移动带动定位板13同步往探针端子方向移动,进而通过橡胶垫17将探针端子两侧进行夹持限定,同时由于定位板13的同步运动,使得橡胶垫17推动探针端子处于滑轨工作台6正中央位置处,且可避免焊接时探针端子受外力而位移,实现定位焊接加工,保证其焊接加工的精度,且利用限位槽15对定位板13移动进行限位,保证橡胶垫17移动夹持的稳定性,同时梯形的橡胶垫17,提高与探针端子接触面积的同时,也避免对探针端子造成硬性夹持,避免造成其表面的磨损。
49.清洁箱10,清洁箱10安装在底座9顶端一侧的一端;
50.清洁机构8,清洁机构8设置在清洁箱10内部的上端,清洁机构8还包括清洁罩801、环形槽802、主动齿轮803、第二伺服电机804、从动齿轮805、清洁棉806和辅助块807,环形槽802环形开设在清洁箱10内部的上端,且环形槽802一端的清洁箱10内部上端设置有清洁罩801,清洁罩801表面四周顶端等角度安装有与环形槽802相配合的辅助块807,且清洁罩801内部下端的两侧安装有清洁棉806,清洁罩801表面的下端安装有从动齿轮805,且清洁罩
801一侧的清洁箱10一侧上端安装有第二伺服电机804,该第二伺服电机804的型号可为42m704l530,第二伺服电机804输出端安装有与从动齿轮805相啮合的主动齿轮803;
51.焊接头3和清洁箱10的中心线处于同一水面线内,且清洁箱10顶端横截面的面积大于焊接头3横截面的面积;
52.清洁罩801的形状为圆台型,且清洁罩801顶端横截面的直径大于清洁罩801顶端横截面的直径;
53.环形槽802和辅助块807的形状为凸型,且辅助块807等角度分布有四个;
54.清洁箱10内部的下端安装有收集罩11,且清洁箱10内部的底端等间距转动连接有滚轮18,滚轮18顶端的清洁箱10内部下端设置有收集槽14;
55.具体地,如图1、图2、图4和图5所示,当焊接头3完全伸入清洁罩801内部,启动第二伺服电机804带动主动齿轮803转动,使得从动齿轮805转动带动清洁罩801转动,同时利用辅助块807在环形槽802内部的滑动,保证清洁罩801转动的平稳性,进而通过清洁罩801内部清洁棉806的转动将焊接头3表面的废锡进行清扫刮落,保证焊接头3自身的洁净度,避免其表面废锡过多,进而影响后续的焊接效果,之后焊接头3往上移动,废锡往下掉落,经过收集罩11的聚拢收集使其掉落至收集槽14内部,再利用滚轮18的滚动摩擦,便于将收集槽14从清洁箱10内部取出,进行集中处理废锡。
56.工作原理:使用本焊接机时,首先外接电源,之后将探针端子放置在滑轨工作台6的顶端;
57.通过plc控制器12启动第一伺服电机5,利用皮带带动正反螺纹杆7转动,再通过正反螺纹杆7和螺纹块16之间的螺纹配合,使得螺纹块16移动带动定位板13同步往探针端子方向移动;
58.进而通过橡胶垫17将探针端子两侧进行夹持限定,同时由于定位板13的同步运动,使得橡胶垫17推动探针端子处于滑轨工作台6正中央位置处,且可避免焊接时探针端子受外力而位移,保证其焊接加工的精度。
59.之后驱动焊接头3至合适位置,再启动气动伸缩杆2带动焊接头3下降,进而开始焊接作业;
60.当焊接头3表面废锡较多时,可驱动焊接头3至清洁箱10正上方,再启动气动伸缩杆2,使得焊接头3完全伸入清洁罩801内部,再启动第二伺服电机804带动主动齿轮803转动,利用主动齿轮803和从动齿轮805之间的相互啮合,使得从动齿轮805转动带动清洁罩801转动;
61.同时利用辅助块807在环形槽802内部的滑动,保证清洁罩801转动的平稳性,进而通过清洁罩801内部清洁棉806的转动将焊接头3表面的废锡进行清扫刮落,保证焊接头3自身的洁净度;
62.之后焊接头3往上移动,废锡往下掉落,经过收集罩11的聚拢收集使其掉落至收集槽14内部,再利用滚轮18的滚动摩擦,便于将收集槽14从清洁箱10内部取出,进行集中处理废锡。
63.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。