1.本发明属于无人车技术领域,具体涉及一种无人车整车通信系统及无人车。
背景技术:
2.无人车是一种能够在各种地面环境中通过遥控或者自主方式完成任务的地面无人系统。它集成了环境感知、定位导航、路径规划、无线传输、运动控制等多项技术。随着科技的不断发展,无人车电子化和智能化成为了趋势,导致电子控制单元(electronic control unit, ecu)数量不断增多,这会产生一些不期望的状况,如需要连接不同ecu的线束增多,安全性变差,增加无人车车辆整体制造难度,同时提高了成本。现有技术中,can(controller area network,控制器局域网总线,是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一)总线采用csma/ca(carrier sense multiple access with collision avoidance)机制。当多个节点同时发生数据时,会通过一套仲裁机制竞争总线,这样会造成有些数据有实效延迟,优先级越低的数据包,可能需要等待的时间越长。无法满足某些子系统对总线实时性的要求。传统can总线最高传输速度为1mbps,无法满足如驱动控制系统等子系统对通信速率较高的要求。若采用多条can总线进行网络布局和搭建,会使得网络架构结构复杂,不能确保满足控制系统的要求。
技术实现要素:
3.本发明的目的在于提供一种无人车整车通信系统及无人车,以解决现有技术中无人车采用单一can总线通信方式存在的系统结构复杂、数据时效性差的技术问题。
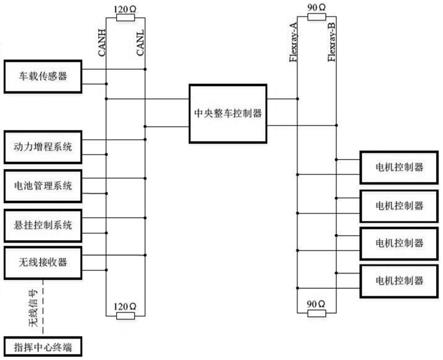
4.为达到上述目的,本发明所采用的技术方案是:第一方面,提供一种无人车整车通信系统,包括中央整车控制器,所述中央整车控制器通过can总线分别与车载传感器、动力系统和悬挂控制系统通信连接;所述中央整车控制器通过flexray总线与用于驱动无人车行走的电机控制器通信连接。
5.进一步地,所述can总线上配置有无线接收器,所述无线接收器用于接收来自指挥中心的控制信号,并通过can总线向中央整车控制器发送接收到的控制信号,实现整车控制决策。
6.进一步地,所述车载传感器包括位移传感器、油压传感器、倾角传感器和imu惯性测量单元,用于通过can总线将无人车当前的运行姿态信息传送给所述中央整车控制器。
7.进一步地,所述动力系统包括动力增程系统与电池能量管理系统,用于将包括电池电压、电池电流、散热器运行功率、发动机输出功率、发动机中冷温度、pdu运行参数在内的动力系统运行数据传输至所述中央整车控制器。
8.进一步地,所述悬挂控制系统通过can总线接收所述中央整车控制器的控制指令,并依据接收到的控制指令控制无人车底盘的升降。
9.进一步地,所述can总线采用双绞线,其两端并联120欧电阻,传输速率500 kbps。
10.进一步地,所述flexray总线采用双通道冗余配置,传输速率10mbps,总线两端并联90欧电阻。
11.进一步地,所述电机控制器包含多组用于驱动无人车行走的电机控制器节点,所述电机控制器节点通过所述flexray总线与中央整车控制器实现信息交换。
12.进一步地,所述flexray总线包括两种媒体访问时序,基于tdma技术的静态部分与基于微小时隙访问机制的动态部分,所述电机控制器节点信息配置在静态部分。
13.第二方面,提供一种无人车,所述无人车配置有第一方面所述的无人车整车通信系统。
14.与现有技术相比,本发明所达到的有益效果:本发明中央整车控制器通过can总线分别与车载传感器、动力系统和悬挂控制系统通信连接,通过flexray总线与用于驱动无人车行走的电机控制器通信连接,实现了一种基于can-flexray双总线的无人化平台整车通信系统,避免了无人车采用单一can总线,当多个节点同时发生数据时,网络实时性较差的问题,有效满足了无人车驱动控制系统信息的实时性与可靠性的要求;解决了采用多条can总线进行网络布局和搭建时,网络架构结构复杂,不能确保满足控制系统的要求的技术问题,具有较好的通用性,结构简单、成本低、易于实现,能有效的避免安全隐患,提高无人车整车系统的通信可靠性。
附图说明
15.图1是本发明实施例提供的一种无人车整车通信系统的整车网络系统结构示意图;图2是本发明实施例提供的一种无人车整车通信系统的总线数据流向图。
具体实施方式
16.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
17.实施例一:如图1、图2所示,一种无人车整车通信系统,包括中央整车控制器,所述中央整车控制器通过can总线分别与车载传感器、动力系统和悬挂控制系统通信连接;所述中央整车控制器通过flexray(是一种用于汽车的高速、可确定性的,具备故障容错能力的总线技术,它将事件触发和时间触发两种方式相结合,具有高效的网络利用率和系统灵活性特点,可以作为新一代汽车内部网络的主干网络)总线与用于驱动无人车行走的电机控制器通信连接。
18.基于can总线的通信网络用于动力增程系统、电池等部件的管理控制、悬挂系统控制以及平台运行状态信息的采集、故障诊断等任务。具有高通信宽带、双通道结构兼具时间触发与事件触发特性等特点的flexray总线用于各电机的驱动控制及信息反馈。
19.通信系统主要包括中央整车控制器(vcu)节点,以can总线为主干通信网络的车载传感器节点、悬挂控制系统节点、动力增程系统节点、电池管理系统节点等,以及以flexray总线为主干通信网络的用于驱动无人车行走的电机控制器节点。
20.中央整车控制器,实现整车控制决策,通过油门、档位、转角、制动等信号来判断无
人车行驶意图;通过传感器监控车速、姿态等车辆状态信息来判断车辆当前实际状态,向悬挂控制系统、电池管理系统、驱动控制系统等发送车辆的运行状态控制指令。
21.can总线上挂载有控制面板、无线接收器。无线接收器用于接收来自指挥中心的无线信号指令,并通过can总线向整车控制器发送控制信号,实现整车控制决策。
22.本实施例中,can总线的传输速率为500kbps,通信介质为双绞线,总线两端并联120欧电阻。
23.悬挂控制系统,通过can总线与整车控制器通信,接收控制指令,执行无人车底盘升降控制。
24.flexray总线提供了两种媒体访问时序,基于tdma(时分多址)技术的静态部分与基于微小时隙访问机制的动态部分。电机控制器节点信息配置在静态部分。
25.当无人车运行时,油门、档位、转角、制动等信号通过can总线发送到中央整车控制器中。中央整车控制器综合无人车当前状态的信息,根据整车能源管理策略与行驶控制策略,通过控制器内部的程序优化算出每一个轮毂电机的输出转速与转矩,并通过内部高速、可靠的flexray总线网络传送到相应的电机控制器中。电机控制器控制相应的电机使其按照要求输出。同时,中央控制器可以综合各个节点发送出的数据,将反应无人车运行状态的重要参数,如轮毂电机转速、増程器状态、电池的参数等信号显示到指挥中心的监控显示屏上,帮助操作员了解整车行驶状态及道路信息。
26.如图1所示,中央整车控制器包含有can总线通信网络与flexray总线通信网络接口,两种接口信息的交互与转换在控制器内部进行。动力增程系统、电池能量管理系统、悬挂系统及整车数据传感器的信息采集与故障诊断信号均在can网络下实现信息的传递与交互。用于驱动无人车行走的电机控制器通过flexray总线网络与中央整车控制器进行通信。
27.动力增程系统与电池能量管理系统组成整车的动力系统,动力系统主要包含高压电池电压、高压电池电流、散热器运行功率、发动机输出功率、发动机中冷温度、pdu运行状态等参数,这些参数通过can总线通讯方式与控制器实现信息的交互。动力系统通过can总线接收整车控制器控制指令,并向整车控制器发送状态信息。
28.车载传感器主要包括位移传感器、倾角传感器、油压传感器、imu惯性测量单元等(位移传感器、倾角传感器、油压传感器、imu惯性测量单元均为can总线输出型传感器),主要用于获取车辆当前的运行姿态。其中,倾角传感器所获取车辆的横摆角与imu所获取的车辆加速度与角加速度可直接通过can总线发送至中央整车控制器,并显示在操控终端。位移传感器主要用在悬挂系统中,通过can总线读取到无人车各支腿油缸内部位移传感器的数值,通过控制器内部算法处理,可实现悬挂系统自动或手动的升降动作。油压传感器用于读取制动蓄能器内部的压力,通过can总线的形式将当前蓄能器压力发送至控制器端,通过与程序所设定的预警压力值相比较后进行液压泵站的启停动作。
29.无线接收器用于接收操控指挥中心的无线信号指令,指令包含油门、档位、转向、制动等车辆运行关键参数。指令通过can信号输入到中央整车控制器,然后中央整车控制器内部会将can信号转化为flexray信号,然后通过flexray总线网络控制驱动电机的动作。flexray总线采用双通道冗余配置,传输速率为10mbps,总线两端并联90欧电阻。电机控制器包含四组电机控制器节点,电机控制器节点通过所述flexray总线与整车控制器实现信息交换。
30.如图2所示,无人车在运行过程中,操作人员通过指挥中心终端将速度信号v*与转角信号θ*经由无线通信模式发送至无线接收器,无线接收器通过can总线将上述控制信号发送至中央整车控制器。结合车载传感器经由can总线发送至中央整车控制器的测得的实际速度v与转角信号θ,并根据整车能源管理策略与行驶控制策略,通过闭环控制算法计算出各个轮毂电机的转速n与转矩t,并通过内部高速、可靠的flexray总线网络传送到相应的电机控制器中。电机控制器控制相应的电机使其按照要求输出。
31.当无人车行驶过程中遇到如斜坡、路障、沟壑等路况,操作人员通过指挥中心终端将行驶模式指令通过无线通信模式发送至无线接收器,无线接收器通过can总线将上述指令信号发送至中央整车控制器。通过中央整车控制器内部算法程序计算出每个悬挂油缸的伸缩量s,并通过can总线发送至悬挂系统的控制器执行。
32.同时,中央整车控制器可以综合各个节点发送出的数据,将反应无人车运行状态的重要参数,如轮毂电机转速、増程器状态、电池的参数等信号显示到指挥中心的监控显示屏上,帮助操作员了解整车行驶状态及道路信息。
33.实施例二:基于实施例一所述的一种无人车整车通信系统,本实施例提供一种无人车,所述无人车配置有实施例一所述的无人车整车通信系统。
34.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。