技术特征:
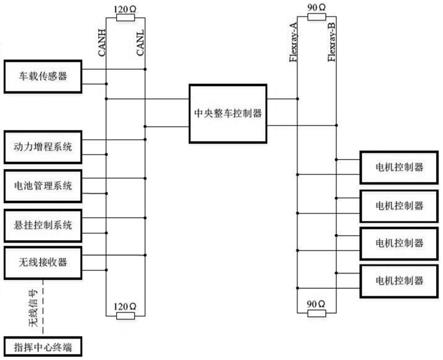
1.一种无人车整车通信系统,其特征是,包括:中央整车控制器,所述中央整车控制器通过can总线分别与车载传感器、动力系统和悬挂控制系统通信连接;所述中央整车控制器通过flexray总线与用于驱动无人车行走的电机控制器通信连接。2.根据权利要求1所述的无人车整车通信系统,其特征是,所述can总线上配置有无线接收器,所述无线接收器用于接收来自指挥中心的控制信号,并通过can总线向中央整车控制器发送接收到的控制信号,实现整车控制决策。3.根据权利要求1所述的无人车整车通信系统,其特征是,所述车载传感器包括位移传感器、油压传感器、倾角传感器和imu惯性测量单元,用于通过can总线将无人车当前的运行姿态信息传送给所述中央整车控制器。4.根据权利要求1所述的无人车整车通信系统,其特征是,所述动力系统包括动力增程系统与电池能量管理系统,用于将包括电池电压、电池电流、散热器运行功率、发动机输出功率、发动机中冷温度、pdu运行参数在内的动力系统运行数据传输至所述中央整车控制器。5.根据权利要求1所述的无人车整车通信系统,其特征是,所述悬挂控制系统通过can总线接收所述中央整车控制器的控制指令,并依据接收到的控制指令控制无人车底盘的升降。6. 根据权利要求1所述的无人车整车通信系统,其特征是,所述can总线采用双绞线,其两端并联120欧电阻,传输速率500 kbps。7.根据权利要求1所述的无人车整车通信系统,其特征是,所述flexray总线采用双通道冗余配置,传输速率10mbps,总线两端并联90欧电阻。8.根据权利要求1所述的无人车整车通信系统,其特征是,所述电机控制器包含多组用于驱动无人车行走的电机控制器节点,所述电机控制器节点通过所述flexray总线与中央整车控制器实现信息交换。9.根据权利要求8所述的无人车整车通信系统,其特征是,所述flexray总线包括两种媒体访问时序,基于tdma技术的静态部分与基于微小时隙访问机制的动态部分,所述电机控制器节点信息配置在静态部分。10.一种无人车,其特征是,所述无人车配置有权利要求1~9任一项所述的无人车整车通信系统。
技术总结
本发明公开了无人车技术领域的一种无人车整车通信系统及无人车,无人车整车通信系统包括中央整车控制器,所述中央整车控制器通过CAN总线分别与车载传感器、动力系统和悬挂控制系统通信连接;所述中央整车控制器通过FlexRay总线与用于驱动无人车行走的电机控制器通信连接。本发明实现了一种基于CAN-FlexRay双总线的无人化平台整车通信系统,避免了无人车采用单一CAN总线,当多个节点同时发生数据时,网络实时性较差的问题;解决了采用多条CAN总线进行网络布局和搭建时,网络架构结构复杂,不能确保满足控制系统的要求的技术问题,具有较好的通用性,结构简单、成本低、易于实现,能有效的避免安全隐患,提高无人车整车系统的通信可靠性。整车系统的通信可靠性。整车系统的通信可靠性。
技术研发人员:解德杰 吕高旺 许刘林
受保护的技术使用者:徐工集团工程机械股份有限公司
技术研发日:2021.11.22
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。