1.本发明涉及升降平台的技术领域,尤其是涉及一种多级升降平台。
背景技术:
2.升降平台是一种对重物进行垂直输送的设备,随着社会科学技术的发展,升降平台已经普及到社会生活的各个角落,升降平台自由升降的特点已经广泛运用于市政维修,码头、物流中心货物运输,建筑装潢等领域中。
3.相关技术手段中,升降平台多为单级升降装置,单级升降装置一般包括承载平台以及驱动承载平台进行升降运动的液压驱动装置。然而单级升降机构的举升高度有限,在对重物进行非常规高度举升时,不满足工作过程中对不同高度的需求。
4.针对上述相关技术手段,单级升降平台存在升降高度有限的问题。
技术实现要素:
5.为了改善单级升降平台升降高度有限的问题,本技术提供一种多级升降平台。
6.本技术提供的一种多级升降平台采用如下的技术方案:
7.一种多级升降平台,包括用于承载重物的承载升降机构以及用于举升所述承载升降机构的叉臂升降机构,所述叉臂升降机构位于所述承载升降机构下端;
8.所述叉臂升降机构包括第一承载架,所述第一承载架上设置有升降组件,所述升降组件远离所述第一承载架的一端设置有第二承载架,所述承载升降机构安装于所述第二承载架远离所述第一承载架所在的一侧;
9.该多级升降平台还包括用于驱动所述升降组件进行升降运动的横向调节组件,所述横向调节组件位于第一承载架和第二承载架之间。
10.通过采用上述技术方案,承载升降机构承载重物进行上升时,叉臂升降机构配合承载升降机构使用,下层的叉臂升降机构再次将重物进行抬升;叉臂升降机构通过横向调节组件对升降组件进行驱动,使得升降组件推动第二承载架在空间位置进行上升或者下降,从而推动承载升降机构达到所需调节的高度,从而改善单级升降平台升降高度有限的问题。
11.可选的,所述升降组件包括第一滑动杆件和第二滑动杆件,第一滑动杆件和第二滑动杆件的中部位置相互铰接;所述第一滑动杆件和所述第二滑动杆件靠近第一承载架的一端均与所述第一承载架滑移配合,所述第一滑动杆件和所述第二滑动杆件靠近第二承载架的一端均与所述第二承载架滑移配合。
12.通过采用上述技术方案,第一承载架位于第一滑动杆件和第二滑动杆件的下端,第二承载架位于第一滑动杆件和第二滑动杆件的上端,第一滑动杆件与第二滑动杆件的中部位置铰接,第一滑动杆件和第二滑动杆件靠近第一承载架的一端与第二承载架进行滑移连接,第一滑动杆件和第二滑动杆件靠近第二承载架的一端与第二承载架进行滑移连接,从而使第一滑动杆件与第二滑动杆件支撑第二承载架起到升降的效果,并同时也起到支撑
的作用。
13.可选的,所述横向调节组件包括正反螺纹杆、第一驱动件和两组驱动杆;所述正反螺纹杆两端分别设置有旋向相反的螺纹,所述正反螺纹杆同时穿设于两组所述驱动杆并与两组所述驱动杆螺纹连接;
14.所述第一滑动杆件与所述第二滑动杆件的铰接位置为升降铰接点,所述驱动杆分别位于升降铰接点的两侧;两组所述驱动杆的上端分别与所述第一滑动杆件以及第二滑动杆件滑移连接,两组所述驱动杆的下端分别与所述第一滑动杆件以及第二滑动杆件滑移连接;
15.所述第一驱动件具有驱动所述正反螺纹杆绕自身轴线转动的扭转力。
16.通过采用上述技术方案,第一驱动件为正反螺纹杆的转动提供了动力,以便正反螺纹杆绕自身轴线转动,从而带动与正反螺纹杆两端螺纹连接的驱动杆相互靠拢或者相互远离,驱动杆的上端分别与第一滑动杆件以及第二滑动杆件滑移连接,驱动杆的下端分别与第一滑动杆件以及第二滑动杆件滑移连接,第一滑动杆件与第二滑动杆件铰接,通过驱动杆的相向运动或者远离运动达到调节第一滑动杆件和第二滑动杆件铰接角度的目的,以便驱动升降机构进行升降。
17.可选的,所述第一滑动杆件侧面设有第三滑槽,所述第二滑动杆件侧面设有第四滑槽;所述驱动杆上端设置有第一滑块,驱动杆下端设置有第二滑块,所述第一滑块设置于所述第三滑槽内并与所述第三滑槽滑移配合,第二滑块设置于第四滑槽内并与所述第四滑槽滑移配合。
18.通过采用上述技术方案,驱动杆上端的第一滑块位于第一滑动杆件设置的第三滑槽内,第一滑块在第三滑槽中运动;驱动杆下端的第二滑块位于第二滑动杆件设置的第四滑槽内,第二滑块在第四滑槽中运动,通过设置滑块,增大了驱动杆与第一滑动杆件和第二滑动杆件滑移连接时产生的接触面,提高运动的稳定性。
19.可选的,所述升降组件还包括铰接杆,所述铰接杆同时与所述第一滑动杆件和所述第二滑动杆件转动连接;所述叉臂升降机构还包括限位件,所述限位件底端与所述第二承载架固定连接,所述限位件面向所述铰接杆的一面开设限位槽,所述铰接杆与所述限位槽滑移连接。
20.通过采用上述技术方案,限位件底端与第二承载架固定连接,面向铰接杆的侧面设有用于容纳铰接杆的限位槽,限制铰接杆的运动轨迹,避免铰接杆在水平方向发生位移,导致第一滑动杆件与第二滑动杆件的重心在水平方向上移动,以使得该多级升降平台容易出现重心不稳的问题,产生承载架倾斜的不良后果;使第一滑动杆件与第二滑动杆件在升降的过程中保持在限位槽里运动,限位件使第一滑动杆件与第二滑动杆件的重心只在垂直方向上移动,承载架在水平面上一直保持平衡状态,提高多级升降平台在升降过程中的稳定性。
21.可选的,所述叉臂升降机构可设置多个且竖直叠加。
22.通过采用上述技术方案,根据需求叉臂升降机构可在竖直方向上进行叠加,在叉臂升降机构上升时,底层叠加的叉臂升降机构也进行上升,多个叉臂升降机构进行一层一层的提升,以使得该多级升降平台具有更加广泛的适用性。
23.可选的,所述承载升降机构包括用于承载汽车的承载平台以及用于驱动所述承载
平台升降的纵向调节组件;所述纵向调节组件包括第三驱动件和单向丝杆,所述第三驱动件与所述单向丝杆同轴固定连接;所述承载平台包括平台基架,所述单向丝杆与所述平台基架螺纹连接。
24.通过采用上述技术方案,第三驱动件为单向丝杆的转动提供了动力,以便单向丝杆实现绕自身轴线转动从而带动与单向丝杆螺纹连接的平台基架可以进行升降运动,通过纵向调节组件将承载平台从最低端提升到最高端,或者将承载平台从最高端提降低到最底端,以此实现对承载平台的提升或者下降的效果。
25.可选的,所述承载平台还包括设置于平台基架上的第二驱动件和受所述第二驱动件驱动的传动齿轮;所述传动齿轮远离所述平台基架所在的一侧设置有用于承载重物的平台板,所述平台板底部设置有齿条,所述齿条与所述传动齿轮啮合连接。
26.通过采用上述技术方案,第二驱动件和传动齿轮位于平台板和平台基架之间,平台板底部设置有齿条,第二驱动件驱动传动齿轮进行转动,由于传动齿轮与平台板底部的齿条相互啮合,以使得传动齿轮带动平台板进行水平方向的移动,同时平台板上承载的重物相对于平台基架也在水平方向向前或者向后运动,实现重物的位置转移。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.1.承载升降机构承载重物进行上升时,叉臂升降机构配合承载升降机构使用,下层的叉臂升降机构推动承载升降机构再次将重物进行抬升;直到重物到达所需调节的高度,从而改善单级升降平台升降高度有限的问题。
29.2.第一驱动件为正反螺纹杆的转动提供了动力,以便正反螺纹杆绕自身轴线转动,从而带动与正反螺纹杆两端螺纹连接的驱动杆相互靠拢或者相互远离,驱动杆的上端分别与第一滑动杆件以及第二滑动杆件滑移连接,驱动杆的下端分别与第一滑动杆件以及第二滑动杆件滑移连接,第一滑动杆件与第二滑动杆件铰接,通过驱动杆的相向运动或者远离运动达到调节第一滑动杆件和第二滑动杆件铰接角度的目的,以便驱动升降机构进行升降。
30.3.驱动杆上端的第一滑块轮位于第一滑动杆件设置的第三滑槽内,第一滑块在第三滑槽中运动;驱动杆下端的第二滑块位于第二滑动杆件设置的第四滑槽内,第二滑块在第四滑槽中运动,通过设置滑块,增大驱动杆与第一滑动杆件和第二滑动杆件滑移连接时的接触面,提高运动的稳定性。
31.4.根据高度需求,叉臂升降机构可在竖直方向上进行叠加,在叉臂升降机构上升时,底层叠加的叉臂升降机构也进行上升,多个叉臂升降机构进行一层一层的提升,以使得该多级升降平台具有更加广泛的适用性。
附图说明
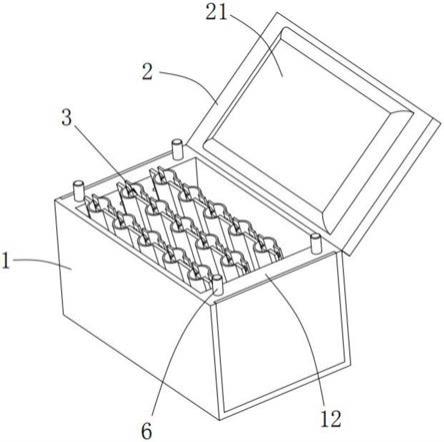
32.图1是本技术的整体结构示意图。
33.图2是本技术的叉臂升降机构和承载升降机构的结构示意图。
34.图3是本技术的叉臂升降机构的结构示意图。
35.图4是本技术的承载升降机构的结构示意图。
36.图5是本技术的承载平台的结构示意图。
37.附图标记说明:
38.1、叉臂升降机构;11、第一承载架;111、第一滑槽;12、第二承载架;121、第二滑槽;13、升降组件;131、第一滑动杆件;1311、第三滑槽;132、第二滑动杆件;1321、第四滑槽;133、第一动轮;134、第二动轮;136、铰接杆;14、横向调节组件;141、正反螺纹杆;142、第一驱动件;143、驱动杆;1431、第一滑块;1432、第二滑块;15、限位件;16、轮组;
39.2、承载升降机构;21、安装壁;22、承载平台;221、平台板;2211、齿条;222、平台基架;223、第二驱动件;224、传动齿轮;23、纵向调节组件;231、第三驱动件;232、单向丝杆。
具体实施方式
40.以下结合附图1-5对本技术作进一步详细说明。
41.本技术实施例公开一种多级升降平台。
42.参照图1,一种多级升降平台包括承载升降机构2以及设置于承载升降机构2下方的叉臂升降机构1,叉臂升降机构1可设置多个并且竖直进行叠加。在本实施例中,叉臂升降机构1竖直叠加设置两个。承载升降机构2用于承载并举升重物,在本实施例中,重物可以是汽车等小型交通工具。在一些其他的实施例中,重物也可以是建筑材料、施工设备、中大型仪器等其他需要在水平和竖直方向转运的物品。本实施例以汽车作为重物进行详细说明。叉臂升降机构1用于对承载升降机构2进行举升,叉臂升降机构1配合承载升降机构2使用,承载升降机构2承载汽车进行上升时,底层的叉臂升降机构1也进行上升,两个叉臂升降机构1进行配合进行一层一层的提升,以使得该多级升降平台具有更加广泛的适用性。
43.参照图2和图3,叉臂升降机构1包括第一承载架11、第二承载架12、横向调节组件14以及升降组件13,第一承载架11位于第二承载架12下方,升降组件13将第一承载架11与第二承载架12连接,横向调节组件14位于第一承载架11和第二承载架12之间。在本实施例中,第一承载架11和第二承载架12均呈长方体状设置,两者形状与大小一致。叉臂升降机构1通过横向调节组件14对升降组件13进行驱动,使得升降组件13推动第二承载架12在空间位置进行上升或者下降,从而推动承载升降机构2达到所需调节的高度。升降组件13和横向调节组件14可单独设置一组或者并排设置多组,在本实施例中,升降组件13和横向调节组件14设置两组,且分别位于第一承载架11的两端。
44.参照图3,升降组件13包括第一滑动杆件131、第二滑动杆件132以及铰接杆136,第一滑动杆件131和第二滑动杆件132在中部位置相互铰接,铰接位置为升降铰接点,铰接杆136位于升降铰接点处且同时与第一滑动杆件131和第二滑动杆件132转动连接。本实施例中,升降铰接点位于第一滑动杆件131和第二滑动杆件132各自的中点处。
45.第一滑动杆件131与第二滑动杆件132靠近第一承载架11的一端均与第一承载架11滑移配合,第一滑动杆件131与第二滑动杆件132靠近第二承载架12的一端均与第二承载架12滑移配合,滑移配合的方式有滑块、滑轮等方式。在本实施中,采用滑轮的滑移配合方式,具体的,第一承载架11面向升降组件13的端面上开设有第一滑槽111,第一滑槽111的长度比第一承载架11的长度短,第二承载架12面向升降组件13的端面上开设有第二滑槽121,第二滑槽121与第一滑槽111配合设置;第一滑动杆件131和第二滑动杆件132与第一承载架11滑移配合的一端设置有第一动轮133,第一动轮133位于第一滑槽111内并与第一滑槽111滚动配合,第一滑动杆件131和第二滑动杆件132与第二承载架12滑移配合的一端设置有第二动轮134,第二动轮134位于第二滑槽121内并与第二滑槽121滚动配合,从而使第一滑动
杆件131与第二滑动杆件132支撑第二承载架12起到升降的效果,使用滚动配合减小第一滑动杆件131和第二滑动杆件132在举升第二承载架12滑移连接时产生的摩擦力,提高运动的稳定性。
46.参照图3,横向调节组件14包括正反螺纹杆141、第一驱动件142、两组驱动杆143以及用于传动驱动力的传动件;正反螺纹杆141两端分别设置有旋向相反的螺纹,驱动杆143分别位于升降铰接点的两侧,正反螺纹杆141同时穿设于两组驱动杆143并与两组驱动杆143螺纹连接,两组驱动杆143的上端分别与第一滑动杆件131以及第二滑动杆件132滑移连接,两组驱动杆143的下端分别与第一滑动杆件131以及第二滑动杆件132滑移连接。
47.在本实施例中,驱动杆143与第一滑动杆件131以及第二滑动杆件132采用滑块和滑槽配合的方式实现滑移连接,具体的,第一滑动杆件131侧面设有第三滑槽1311,第二滑动杆件132侧面设有第四滑槽1321;驱动杆143上端设置有第一滑块1431,第一滑块1431设置于所述第三滑槽1311内并与所述第三滑槽1311滑移配合,驱动杆143下端设置有第二滑块1432,第二滑块1432设置于第四滑槽1321内并与所述第四滑槽1321滑移配合,第一滑块1431在第三滑槽1311中运动,第二滑块1432在第四滑槽1321中运动。
48.第一驱动件142固定设置于第一承载架11上,第一驱动件142为正反螺纹杆141的转动提供了动力,传动件用于将第一驱动件142产生的驱动力传动至正反螺纹杆141上,以便正反螺纹杆141绕自身轴线转动,从而带动与正反螺纹杆141两端螺纹连接的驱动杆143相互靠拢或者相互远离,通过驱动杆143的相向运动或者远离运动达到调节第一滑动杆件131和第二滑动杆件132铰接角度的目的,以便进行举升或者降低第二承载架12,达到驱动升降机构进行升降的目的。在本实施例中,第一驱动件142可使用液压气缸、伺服电机、油缸等装置;传动件可使用齿轮、联轴器等装置。
49.叉臂升降机构1还包括限位件15。在本实施例中,限位件15大体呈长方体状设置,限位件15的底端与第一承载架11固定连接,限位件15面向铰接杆136的一面开设有用于容纳铰接杆136的限位槽,限位槽为竖直方向设置;限位件15用于限制铰接杆136的运动轨迹,避免使铰接杆136在水平方向发生位移,导致第一滑动杆件131与第二滑动杆件132的重心在水平方向上移动,产生承载架倾斜的不良后果;铰接杆136与限位槽滑移连接,使第一滑动杆件131与第二滑动杆件132在升降的过程中铰接轴保持在限位槽里运动,从而使升降机构的重心只在垂直方向上移动,承载架可一直保持平衡的状态。
50.叉臂升降机构1还包括轮组16,轮组16可拆卸安装于第一承载架11上。在本实施例中,轮组16包括四个滚动轮,滚动轮一一对应设置于第一承载架11的四个边角上,以使得整个多级升降平台能够在水平方向运动。在一些其他实施例中,轮组16可以根据需要自动运行或者根据人工操作进行运动。
51.参照图4,承载升降机构2与第二承载架12固定连接,承载升降机构2包括安装壁21、纵向调节组件23和承载平台22;安装壁21与第二承载架12固定连接,在本实施例中,安装壁21大体呈矩形状,安装壁21数量为两个且相对设置,纵向调节组件23设置有四个,每个安装壁21上设置两个纵向调节组件23。
52.纵向调节组件23包括第三驱动件231、单向丝杆232和联轴器,安装壁21上设置有用于容纳单向丝杆232的纵向通槽,通槽底部设有向心推力轴承,单向丝杆232位于向心推力轴承上且于安装壁21转动连接;第三驱动件231与所述单向丝杆232同轴固定连接,第三
驱动件231固定连接于安装壁21上端面上,联轴器位于第三驱动件231和单向丝杆232之间,第三驱动件231为单向丝杆232的转动提供了动力,联轴器将第三驱动件231上输出的动力传动到单向丝杆232上,以便单向丝杆232实现绕自身轴线转动。
53.参照图5,承载平台22包括平台板221、平台基架222、第二驱动件223和传动齿轮224;平台板221用于承载汽车,平台板221位于平台基架222之上。在本实施例中,平台板221呈长方体设置,平台基架222大致呈长方体设置,平台板221在长度方向和宽度方向与平台基架222相比均略小。平台板221底部设置有齿条2211,齿条2211与传动齿轮224啮合连接,第二驱动件223和传动齿轮224均设置于平台基架222上,传动齿轮224受第二驱动件223驱动,第二驱动件223驱动传动齿轮224,使与传动齿轮224啮合的齿条2211运动,齿条2211带动平台板221在水平方向向前或者向后运动,同时平台板221上承载的重物相对于平台基架222也在水平方向向前或者向后运动。
54.单向丝杆232与平台基架222螺纹连接,第三驱动件231产生驱动力带动与单向丝杆232螺纹连接的平台基架222进行升降运动,将承载平台22从最低端提升到最高端,或者将承载平台22从最高端提降低到最底端,以此实现对承载平台22的提升或者下降的效果。
55.平台板221设置有导向板,导向板与平台板221滑移连接,在汽车需要运动至平台板221上时,可以移出导向板;具体的,导向板设置有用于朝向地面倾斜的导向斜面,导向斜面减缓了平台板221与地面的垂直高度差,方便汽车从地面运动到平台板221上。
56.本技术实施例一种多级升降平台的实施原理为:用于举升的叉臂升降机构1和用于承载重物的承载升降机构2进行配合,承载升降机构2的平台板221用于承载重物,承载升降机构2通过第三驱动件231驱动单向丝杆232绕自身轴向转动,带动与单向丝杆232螺纹连接的平台基架222进行上升,从而带动平台板221上的重物进行空间位置上的上升;承载升降机构2通过第二承载基架与叉臂升降机构1固定连接,底层的叉臂升降机构1通过第一驱动件142驱动正反螺纹杆141绕自身轴向转动,带动与正反螺纹杆141两端螺纹连接的驱动杆143进行相向运动,两组驱动杆143的上端分别与第一滑动杆件131以及第二滑动杆件132滑移连接,两组驱动杆143的下端分别与第一滑动杆件131以及第二滑动杆件132滑移连接,第一滑动杆件131和第二滑动杆件132在中部位置相互铰接,第一滑动杆件131与第二滑动杆件132靠近第一承载架11的一端均与第一承载架11滑移配合,第一滑动杆件131与第二滑动杆件132靠近第二承载架12的一端均与第二承载架12滑移配合,从而使第一滑动杆件131与第二滑动杆件132支撑第二承载架12起到升降的效果;多个叉臂升降机构1进行配合进行一层一层的提升,将重物从地面垂直输送到高空,进行空间位置的转换。
57.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,其中相同的零部件用相同的附图标记表示,需要说明的是,上面描述中使用的词语“上”和“下”指的是附图中的方向。故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。