1.本发明涉及磁吸附式金属壁面移动机器人技术领域,具体地,涉及一种磁向可控的吸附轮及其壁面移动机器人。
背景技术:
2.壁面移动机器人是一种能附着在作业对象上进行运动和高空作业的移动装置,其移动范围从常规的水平地面延伸到了壁面、高空或者水下,通过在壁面移动机器人上搭载不同的传感和作业装置,可替代或辅助人类完成复杂、危险的作业任务。壁面移动机器人必须具备两种基本功能:吸附和移动。对于吸附功能,通常可采用的方式有永磁吸附、电磁吸附、负压吸附、仿生吸附、推力吸附等。对于移动功能,通常可采用的方式有轮式、履带式、足式、混合式等。
3.针对不同的应用环境和作业对象,壁面移动机器人可采用不同的吸附和移动方式。对于铁磁性材料的金属壁面,由于磁吸附相对更可靠,轮式移动具有更好的转向性能,移动机器人通常采用永磁吸附与轮式移动相结合的方案。
4.经检索发现,专利公布号为cn201325495y提供了一种爬行小车橡胶磁轮吸附驱动结构,其橡胶磁轮由两块钢轮夹紧一个圆柱形的磁轮,磁轮的材料为永磁体,在磁轮的外面包裹了一层橡胶敷层,橡胶敷层的外缘稍微高出钢轮并被两侧的钢轮压紧。该结构从原理上能够实现对导磁性壁面的吸附,但在磁路设计、结构、制作工艺等方面存在诸多不足,实用价值有限。
5.专利公布号为cn106697100a提供了一种轮式永磁吸附装置,由环形钕铁硼永磁体、外侧硅钢导磁轭铁、内侧硅钢导磁轭铁、定位套组成。该装置采用夹心结构,环形钕铁硼永磁体内嵌在外侧硅钢导磁轭铁与内侧硅钢导磁轭铁之间的凹槽内;外侧硅钢导磁轭铁经驱动轴末端的螺钉与磁轮驱动轴固定在一起,外侧硅钢导磁轭铁和内侧硅钢导磁轭铁分别通过各自侧面的螺纹孔固定拧紧;定位套则一端套在外侧硅钢导磁轭铁中心的外圆上,另一端套在内侧硅钢导磁轭铁中心部位位置的外圆上;两导磁轭铁分别充分接触包裹轴向充磁的永磁体两极,同时在磁轮外侧的导磁轭铁上包覆了橡胶,以增大摩擦力。但是该磁轮装置一旦设计定型之后,其磁力及磁向不可调,难以解决磁轮从被吸附面上不方便取下的问题。
6.专利公布号为cn113212060a提供了一种磁轮及爬壁机器人,该磁轮包含磁轮本体和脱离部件,磁轮本体能够吸附于工作面,并能相对工作面转动,脱离部件为非磁性部件,脱离部件能够被磁轮本体带动转动,以伸入磁轮本体和工作面之间,导致磁轮本体与工作面之间的距离增大,进而使其磁吸力减小,以便以较为省力的方式将爬壁机器人回收或搬运移动,但是该磁轮难以应对机器人跨越不同壁面的难题。
7.综上,现有的磁吸附式壁面移动机器人存在两方面的技术挑战:一方面为了保证磁吸附可靠而要求具有足够大的磁力,但是磁力太大又存在难以从作业面上取下的问题;另一方面采用轮式移动方式机器人虽然转向灵活,但通常只适合在一个作业面上移动,而
当需要从一个作业面跨越到相邻的另一个作业面时,存在难以自动跨越不同壁面的难题。
技术实现要素:
8.针对现有技术中存在的问题,本发明提供了一种磁向可控的吸附轮及其壁面移动机器人。该壁面机器人采用磁轮结构,在保证足够磁吸附力的情况下,可以很轻松的从磁性作业面上脱离;此外,当需要该壁面机器人由一个作业面跨越到另一个作业面时,通过改变磁轮的磁向,将磁吸附作用面从一个作业面转换到另一个作业面,从而实现壁面移动机器人壁面间的跨越。
9.为实现上述目的,本发明采用如下技术方案:一种磁向可控的吸附轮,包括:磁铁支撑轴架、侧端盖、侧端盖轴、轮圈、磁铁阵列、驱动电机、磁向电机,所述轮圈的两侧设有侧端盖,所述轮圈的中心处设有磁铁支撑轴架,所述磁铁支撑轴架的两端贯穿侧端盖,与侧端盖轴连接,所述侧端盖轴与驱动电机连接;所述磁向电机与磁铁支撑轴架连接,且所述磁铁支撑轴架与磁铁阵列连接,所述磁铁阵列设置于轮圈中。
10.进一步地,所述磁铁阵列为海尔贝克阵列。
11.进一步地,所述磁铁支撑轴架通过支撑轴承与侧端盖刚性连接。
12.进一步地,所述驱动电机设置于侧端盖轴上,所述驱动电机的输出轴与侧端盖轴连接。
13.进一步地,所述磁向电机设置于侧端盖轴上,所述磁向电机输出轴与磁铁支撑轴架通过孔键连接。
14.本发明还提供了一种由所述磁向可控的吸附轮构成的壁面移动机器人,由机架、控制系统和若干个磁向可控的吸附轮组成,所述磁向可控的吸附轮集成于机架上,所述控制系统设置于机架上,所述控制系统与磁向可控的吸附轮连接。
15.进一步地,所述控制系统分别与每个磁向可控的吸附轮的驱动电机、磁向电机连接。
16.与现有技术相比,本发明具有如下有益效果:本发明磁向可控的吸附轮通过在轮圈内部设置磁铁支撑轴架,使得磁向电机控制磁铁支撑轴架的转动从而带动磁铁阵列的转动,从而改变轮圈吸附的壁面,使得轮圈能够稳稳吸附在壁面上,大大增加了磁轮的移动抓地能力,使得轮圈在移动过程中不易滑移;将本发明的磁向可控的吸附轮组装在机架上形成壁面移动机器人,通过改变磁轮的磁向,将磁吸附作用面从一个作业面转换到另一个作业面,从而实现壁面移动机器人壁面间的跨越。本发明的壁面移动机器人可以适用于高温、高污染等高危作业环境中,操作人员在远端对壁面机器人进行遥控即可,完全避免了人员进入高危环境的安全隐患。
附图说明
17.图1是本发明磁向可控的吸附轮的结构示意图;图2是本发明中磁铁阵列的示意图;图3是本发明磁向可控的吸附轮进行直角换面过程示意图;图4是本发明带有磁向可控吸附轮的壁面移动机器人的结构示意图;图5为本发明带有磁向可控吸附轮的壁面移动机器人的工作示意图;
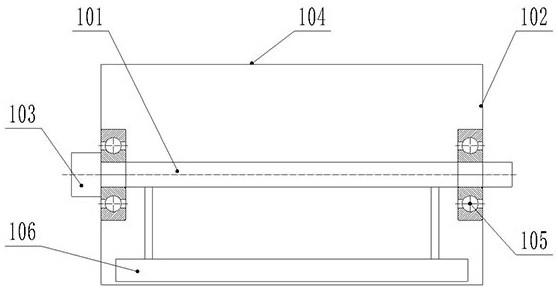
其中,101.磁铁支撑轴架,102.侧端盖,103.侧端盖轴,104.轮圈,105.支撑轴承,106.磁铁阵列,301.第一壁面,302.第二壁面,401.第一磁向可控吸附轮,402.第二磁向可控吸附轮,403. 第三磁向可控吸附轮,404. 第四磁向可控吸附轮,405.驱动电机,406.磁向电机。
具体实施方式
18.以下结合附图对本发明中的技术方案进行清楚、完整地描述,显然,所描述的具体实施方式仅仅是本发明一部分,而不是全部。所举实例只用于解释本发明,并非用于限定本发明的范围。需要说明的是,基于本发明中的具体实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.如图1为本发明磁向可控的吸附轮的结构示意图,该磁向可控的吸附轮包括:磁铁支撑轴架101、侧端盖102、侧端盖轴103、轮圈104、磁铁阵列106、驱动电机405、磁向电机406,本发明中轮圈104的外侧包覆一层具有一定强度和厚度的橡胶,可有效增加摩擦力,在保证吸附轮与作业面吸附力的同时,大大增强吸附轮的移动抓地能力;轮圈104的两侧设有侧端盖102,轮圈104的中心处设有磁铁支撑轴架101,磁铁支撑轴架101与轮圈104可以相对运动,磁铁支撑轴架101的两端贯穿侧端盖102,与侧端盖轴103连接,侧端盖轴103与驱动电机405连接,具体地,驱动电机405设置于侧端盖轴103上,驱动电机405的输出轴与侧端盖轴103连接,通过驱动电机405驱动侧端盖轴103的转动进而驱动吸附轮的转动;磁向电机406与磁铁支撑轴架101连接,且磁铁支撑轴架101与磁铁阵列106连接,磁铁阵列106设置于轮圈104中,具体地,磁向电机406设置于侧端盖轴103上,磁向电机406输出轴与磁铁支撑轴架101通过孔键连接,通过磁向电机406驱动磁铁支撑轴架101转动,从而带动磁铁阵列106在轮圈104内部转动。本发明中的磁向可控的吸附轮实现转动时,磁铁阵列106相对于轮圈104保持静止,当吸附轮需要从一个避免跨越到另一个壁面时,磁向电机406机驱动磁铁支撑轴架101转动,使得磁铁阵列106转动,从而使磁铁阵列106与另一个壁面进行磁性吸附,使得吸附轮跨越到另一个壁面上,实现吸附轮在壁面间跨越。
20.如图2,本发明中磁铁阵列106为海尔贝克阵列,海尔贝克阵列可以最大程度的将磁吸附力集中在磁铁阵列106的下表面,在保证足够的磁吸附力情况下,控制磁铁阵列106的位置偏离吸附轮与作业面的接触位置一定角度,使得磁铁阵列106相对于作业面的磁吸附力减小,从而很轻松的从磁性作业面上脱离。
21.本发明中磁铁支撑轴架101通过支撑轴承105与侧端盖102刚性连接,使得侧端盖102、侧端盖轴103连接在轮圈104上组成一个刚性整体,通过驱动电机405驱动侧端盖轴103,使得吸附轮实现转动;同时,磁铁支撑轴架101、磁铁阵列106组成刚性整体,使得驱动电机406驱动磁铁支撑轴架101相对侧端盖102、侧端盖轴103、轮圈104组成的刚性整体可以自由转动,从而实现驱动电机405和磁向电机406的独立控制。
22.如图3为本发明磁向可控的吸附轮进行直角换面过程示意图,吸附轮在驱动电机405驱动下移动至第一壁面301和第二壁面302的交界处,此时磁铁阵列106吸附在第一壁面301上,经过磁向电机406驱动磁铁支撑轴架101转动,磁铁阵列106旋转至第二壁面302处,此时磁铁阵列106吸附在第二壁面302上,吸附轮在驱动电机405驱动下从第一壁面301跨越到第二壁面302上,完成直角换面。
23.本发明还提供了一种壁面移动机器人,由机架、控制系统和若干个磁向可控的吸附轮组成,磁向可控的吸附轮集成于机架上,控制系统设置于机架上,控制系统与磁向可控的吸附轮连接,具体地,控制系统分别与每个磁向可控的吸附轮的驱动电机405、磁向电机406连接,通过控制系统分别控制每个磁向可控的吸附轮的独立控制,实现壁面机器人从一个壁面跨越到另一个壁面。
实施例
24.参见图4,该壁面移动机器人将第一磁向可控吸附轮401、第二磁向可控吸附轮402、第三磁向可控吸附轮403、第四磁向可控吸附轮404集成于机架上,将第一磁向可控吸附轮401、第二磁向可控吸附轮402为一组,通过控制系统设置在各自驱动电机405的驱动下,同速同向运动;第三磁向可控吸附轮403、第四磁向可控吸附轮404为一组,通过控制系统在各自驱动电机405的驱动下,同速同向运动。参见图5,该壁面移动机器人的工作过程具体为:两组磁向可控吸附轮同速同向时,壁面机器人直行;差速时,壁面机器人转向;当壁面移动机器人在一个作业面作业时,第一磁向可控吸附轮401、第二磁向可控吸附轮402、第三磁向可控吸附轮403、第四磁向可控吸附轮404的磁铁阵列在各自磁向电机406驱动下,均指向该作业面;当壁面移动机器人移动到该作业面与另一壁面交界处时,第一磁向可控吸附轮401、第二磁向可控吸附轮402的磁铁阵列在各自磁向电机406驱动下,指向另一作业面,同时第一磁向可控吸附轮401、第二磁向可控吸附轮402在各自驱动电机405的驱动下跨越到另一作业面上,随后第三磁向可控吸附轮403、第四磁向可控吸附轮404也是类似跨越过程,最终完成壁面移动机器人直角换面。本发明的壁面移动机器人可以适用于高温、高污染等高危作业环境中,操作人员在远端对壁面机器人进行遥控即可,完全避免了人员进入高危环境的安全隐患。
25.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。