1.本发明涉及物流技术领域,尤其涉及一种穿梭车控制方法、装置、穿梭车以及存储介质。
背景技术:
2.在现代自动化物流仓库中,通常使用往复型轨道穿梭车(shuttle小车)取放货架上的物品。穿梭车有定距穿梭车和变距穿梭车等,定距穿梭车是指取放机构是固定宽度的,变距穿梭车是指取放机构能够在一定范围内调整。穿梭车取放的物品可以为料箱(商品放在料箱里)等,也可能是具有完整包装的商品。控制穿梭车将料箱放到货架的储位,并在系统中记录储位的位置,在需要取货时,控制穿梭车移动到相应的储位,从货架储位取料箱。在实际使用中,由于机械振动或者其它方面的因素,货架上的料箱在货架上会产生位置移动和角度偏移;如果穿梭车依旧按照系统记录的位置取料箱,则在取料箱的过程中,穿梭车可能撞坏料箱,出现取料箱失败、需要人工处理的异常情况。
技术实现要素:
3.有鉴于此,本发明要解决的一个技术问题是提供一种穿梭车控制方法、装置、穿梭车以及存储介质。
4.根据本公开的第一方面,提供一种穿梭车控制方法,包括:控制穿梭车到达指定位置,并控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离;其中,所述第一测距装置和所述第二测距装置分别安装在所述穿梭车并行设置的第一出叉机构和第二出叉机构上;将所述第一距离和所述第二距离分别与目标正常距离阈值进行第一比较处理,基于第一比较处理结果确定是否能够控制所述第一出叉机构和第二出叉机构进行货物处理;在确定不能控制所述第一出叉机构和第二出叉机构进行货物处理的状态下,将所述第一距离和所述第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制所述穿梭车进行纠偏处理。
5.可选地,所述基于第一比较处理结果确定是否能够控制所述第一出叉机构和第二出叉机构进行货物处理包括:如果所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值,则确定能够控制所述第一出叉机构和第二出叉机构进行货物处理。
6.可选地,所述控制所述第一出叉机构和所述第二出叉机构进行货物处理包括:控制所述第一出叉机构和所述第二出叉机构分别伸出第一出叉长度,其中,所述第一出叉长度与所述目标正常距离阈值相等。
7.可选地,所述基于第二比较处理结果确定是否控制所述穿梭车进行纠偏处理包括:如果所述第一距离小于所述纠偏距离阈值,或者所述第二距离小于所述纠偏距离阈值,则确定不能控制所述穿梭车进行纠偏处理。
8.可选地,在确定不能控制所述穿梭车进行纠偏处理的状态下,上报所述搬运目标
摆放异常信息。
9.可选地,所述控制所述穿梭车进行纠偏处理包括:基于所述第一距离和所述第二距离,控制所述第一出叉机构和所述第二出叉机构分别伸出第二出叉长度,并控制所述穿梭车前、后移动。
10.可选地,所述基于所述第一距离和所述第二距离,控制所述第一出叉机构和所述第二出叉机构分别伸出第二出叉长度包括:在所述第一距离和所述第二距离中选取较短的距离;将所述较短的距离与测量误差阈值的差作为所述第二出叉长度。
11.可选地,所述控制所述穿梭车前、后移动包括:基于前移距离设定值和后移距离设置值,控制所述穿梭车进行至少一次前、后移动,直至所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值。
12.可选地,所述搬运目标包括:货箱;所述第一测距装置和所述第二测距装置包括:激光测距装置。
13.根据本公开的第二方面,提供一种穿梭车控制装置,包括:距离检测模块,用于控制穿梭车到达指定位置,并控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离;其中,所述第一测距装置和所述第二测距装置分别安装在所述穿梭车并行设置的第一出叉机构和第二出叉机构上;货物处理模块,用于将所述第一距离和所述第二距离分别与目标正常距离阈值进行第一比较处理,基于第一比较处理结果确定是否能够控制所述第一出叉机构和第二出叉机构进行货物处理;纠偏处理模块,用于在确定不能控制所述第一出叉机构和第二出叉机构进行货物处理的状态下,将所述第一距离和所述第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制所述穿梭车进行纠偏处理。
14.可选地,所述货物处理模块,包括:取货判断单元,用于如果所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值,则确定能够控制所述第一出叉机构和第二出叉机构进行货物处理。
15.可选地,所述货物处理模块,包括:倍程处理单元,用于控制所述第一出叉机构和所述第二出叉机构分别伸出第一出叉长度,其中,所述第一出叉长度与所述目标正常距离阈值相等。
16.可选地,所述纠偏处理模块,包括:纠偏判断单元,用于如果所述第一距离小于所述纠偏距离阈值,或者所述第二距离小于所述纠偏距离阈值,则确定不能控制所述穿梭车进行纠偏处理。
17.可选地,所述纠偏处理模块,包括:异常上报单元,用于在确定不能控制所述穿梭车进行纠偏处理的状态下,上报所述搬运目标摆放异常信息。
18.可选地,所述纠偏处理模块,包括:机构控制单元,用于基于所述第一距离和所述第二距离,控制所述第一出叉机构和所述第二出叉机构分别伸出第二出叉长度,并控制所述穿梭车前、后移动。
19.可选地,所述机构控制单元,用于在所述第一距离和所述第二距离中选取较短的距离;将所述较短的距离与测量误差阈值的差作为所述第二出叉长度。
20.可选地,所述机构控制单元,用于基于前移距离设定值和后移距离设置值,控制所述穿梭车进行至少一次前、后移动,直至所述第一距离大于所述目标正常距离阈值,并且所
述第二距离大于所述目标正常距离阈值。
21.可选地,所述搬运目标包括:货箱;所述第一测距装置和所述第二测距装置包括:激光测距装置。
22.根据本公开的第三方面,提供一种穿梭车控制装置,包括:存储器;以及耦接至所述存储器的处理器,所述处理器被配置为基于存储在所述存储器中的指令,执行如上所述的方法。
23.根据本公开的第四方面,提供一种穿梭车,包括:如上所述的穿梭车控制装置。
24.根据本公开的第五方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述指令被处理器执行如上所述的方法。
25.根据本公开的第六方面,提供一种用于穿梭车的货物纠偏控制方法,包括:控制穿梭车到达指定位置,并控制第一出叉机构和第二出叉机构分别伸出第二出叉长度;控制所述穿梭车前、后移动,用以对货物进行纠偏处理。
26.可选地,所述控制第一出叉机构和第二出叉机构分别伸出第二出叉长度包括:控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离;其中,所述第一测距装置和所述第二测距装置分别安装在所述穿梭车并行设置的第一出叉机构和第二出叉机构上;将所述第一距离和所述第二距离分别与目标正常距离阈值进行第一比较处理,基于第一比较处理结果确定是否能够控制所述第一出叉机构和第二出叉机构进行货物处理;在确定不能控制所述第一出叉机构和第二出叉机构进行货物处理的状态下,将所述第一距离和所述第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制控制第一出叉机构和第二出叉机构分别伸出第二出叉长度。
27.可选地,如果所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值,则确定能够控制所述第一出叉机构和第二出叉机构分别伸出第二出叉长度。
28.可选地,在所述第一距离和所述第二距离中选取较短的距离;将所述较短的距离与测量误差阈值的差作为所述第二出叉长度。
29.可选地,所述控制所述穿梭车前、后移动包括:基于前移距离设定值和后移距离设置值,控制所述穿梭车进行至少一次前、后移动,直至所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值。
30.根据本公开的第七方面,提供一种用于穿梭车的货物纠偏控制装置,包括:存储器;以及耦接至所述存储器的处理器,所述处理器被配置为基于存储在所述存储器中的指令,执行如上所述的方法。
31.本公开的穿梭车控制方法、装置、穿梭车以及存储介质,能够检测到搬运目标倾斜并能够对搬运目标进行位置纠正处理,能够使穿梭车稳定取箱,降低运送搬运目标失败的概率,提高了物流的安全性和可靠性,提高了客户的使用感受度。
附图说明
32.为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还
可以根据这些附图获得其他的附图。
33.图1为根据本公开的穿梭车控制方法的一个实施例的流程示意图;
34.图2为穿梭车取货的示意图;图3a和图3b为穿梭车的出叉机构的示意图;
35.图4a和图4b为穿梭车进行纠偏处理的示意图;
36.图5为根据本公开的穿梭车控制方法的一个实施例中的控制穿梭车进行纠偏的流程示意图;
37.图6为根据本公开的穿梭车控制装置的一个实施例的模块示意图;
38.图7为根据本公开的穿梭车控制装置的一个实施例中的货物处理模块的模块示意图;
39.图8为根据本公开的穿梭车控制装置的一个实施例中的纠偏处理模块的模块示意图;
40.图9为根据本公开的穿梭车控制装置的另一个实施例的模块示意图。
具体实施方式
41.下面参照附图对本公开进行更全面的描述,其中说明本公开的示例性实施例。下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
42.下文中的“第一”、“第二”等,仅用于描述上相区别,并没有其他特殊的含义。
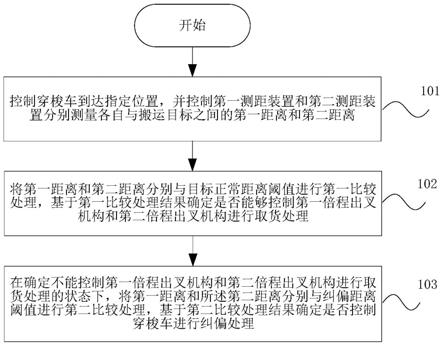
43.图1为根据本公开的穿梭车控制方法的一个实施例的流程示意图,如图1所示:
44.步骤101,控制穿梭车到达指定位置,并控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离。
45.在一个实施例中,指定位置可以为与搬运目标对应的储位位置。搬运目标包括货箱、料箱等,第一测距装置和第二测距装置可以为激光测距装置等。第一测距装置和第二测距装置分别安装在穿梭车并行设置的第一出叉机构(出叉机构有多种,可以为单程或倍程机构)和第二出叉机构上。
46.如图2所示,控制穿梭车将料箱01,02,03放到货架的储位上,记录储位的位置。在需要从储位上搬走料箱01,02,03时,控制穿梭车移动到相应的储位(指定位置),通过伸展第一出叉机构04和第二出叉机构05夹持料箱,从货架储位上取走料箱。出叉机构的最短状态如图3a所示,出叉机构的展开状态如图3b所示。
47.步骤102,将第一距离和第二距离分别与目标正常距离阈值进行第一比较处理,基于第一比较处理结果确定是否能够控制第一出叉机构和第二出叉机构进行货物处理。货物处理可以为多种,例如为取货处理、移货处理、货物巡检处理等。
48.步骤103,在确定不能控制第一出叉机构和第二出叉机构进行货物处理的状态下,将第一距离和第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制穿梭车进行纠偏处理。
49.在一个实施例中,如果第一距离大于目标正常距离阈值,并且第二距离大于目标正常距离阈值,则确定能够控制第一出叉机构和第二出叉机构进行货物处理。控制第一出
叉机构和第二出叉机构分别伸出第一出叉长度,其中,第一出叉长度与目标正常距离阈值相等。如果出叉机构为倍程出叉机构,则出叉长度为倍程出叉长度。
50.如果第一距离小于目标正常距离阈值,或第二距离小于目标正常距离阈值,则确定不能够控制第一出叉机构和第二出叉机构进行货物处理。如果第一距离小于纠偏距离阈值,或者第二距离小于纠偏距离阈值,则确定不能控制穿梭车进行纠偏处理。在确定不能控制穿梭车进行纠偏处理的状态下,上报搬运目标摆放异常信息。
51.本公开的穿梭车控制方法,能够检测到搬运目标倾斜并能够对搬运目标进行纠正处理,能够使穿梭车稳定取箱,降低运送搬运目标失败的概率。
52.图4a和4b所示,2号移动板和3号固定板为出叉机构。如果2号移动板不能够前后移动,则穿梭车为定距穿梭车;如果2号移动板能够沿前后移动,则为变距穿梭车。2号移动板、3号固定板可以是联动方式,也可以是分别控制方式;联动方式是指控制2号、3号板同时伸出,分别控制方式是指分别控制2号、3号板伸出,2号、3号板伸出的距离可以不同。
53.穿梭车通常使用联动机构,能够节省一套伺服系统。拨叉能够抬起和放下。正常取货箱时,根据现有的控制方式进行控制:先抬起拨叉,伸出出叉机构,然后放下拨叉,收回出叉机构,在收回出叉机构的过程中,拨叉钩住货箱,将货箱带回到穿梭车上。
54.第一测距装置和第二测距装置分别为1号激光传感器和2号激光传感器,采用激光测距传感器能够检测沿激光方向物体到该传感器的距离,1号激光传感器和2号激光传感器光束分别平行于2号移动板和3号固定板,尽可能的靠近2号移动板和3号固定板的内测(内侧指靠近料箱的一侧)。
55.l0指激光传感器到料箱左边缘的距离,l0为目标正常距离阈值,可以预先根据试验进行设置l0的距离长度。判断是否能够直接伸出出叉机构进行取箱:如果1号激光传感器测得的距离la第一距离)》0并且2号激光传感器测得的距离lb(第二距离)》l0,则可以确定直接伸出2号移动板和3号固定板,用以取料箱。
56.判断能否进行纠偏:如果la《lc或者lb《lc,则不能进行纠偏处理;lc是一个经验值,为纠偏距离阈值,可以预先根据试验进行设置lc的长度。当料箱歪到一定程度,则认为无法进行纠偏操作,穿梭车通过网络上报异常,由人工进行处理。如果能够纠偏,则控制穿梭车进入纠偏流程。
57.图5为根据本公开的穿梭车控制方法的一个实施例中的控制穿梭车进行纠偏的流程示意图,如图5所示:
58.步骤501,基于第一距离和第二距离,控制第一出叉机构和第二出叉机构分别伸出第二出叉长度。
59.例如,在第一距离和第二距离中选取较短的距离,将较短的距离与测量误差阈值的差作为第二出叉长度。在控制第一出叉机构和第二出叉机构分别伸出第二出叉长度之后,控制穿梭车前、后移动。
60.步骤502,基于前移距离设定值和后移距离设置值,控制穿梭车进行至少一次前、后移动,直至第一距离大于目标正常距离阈值,并且第二距离大于目标正常距离阈值。
61.在一个实施例中,计算第一出叉机构和第二出叉机构分别伸出的第二出叉长度(距离):如果la》lb,则伸出的第二出叉长度为ld=lb-le,le为测量误差阈值,即为激光发射点沿激光方向的测量误差,可以预先根据试验进行设置le的距离长度。ld的距离取值尽
可能往外多伸但不撞到料箱;如果la《lb则ld=la-le。
62.控制穿梭车缓慢向前移动距离s1(前移距离设定值),s1可以为根据试验获得的经验值,也可以通过预设的函数关系进行计算获得,s1可以为穿梭车能够移动的最大值。穿梭车反向移动,后移距离设置值为s2,s2可以为根据试验获得的经验值,s2可以为避开激光传感器光束的最小距离。因为穿梭车移动s1的过程中,有一个出叉机构贴着料箱,反向移动s2后,箱子避开遮挡,如果第一距离大于目标正常距离阈值,并且第二距离大于目标正常距离阈值,则确定纠偏操作完成。
63.料箱的纠偏操作可能不是一次完成。例如,在第一纠偏操作中,控制穿梭车首先向前移动;在第二次纠偏操作时,控制穿梭车首先向后移动。如果穿梭车在停车时坐标为x0,根据实际场景需要,能够移动纠偏的距离为s3。第一次纠偏时,s1=s3,移动后的坐标为,x1=x0 s1,反向移动后的坐标为:x2=x0 s1-s2;第二次纠偏时,第一次的移动坐标为:x3=x0-s3,反向移动的坐标为:x4=x3 s2。以此类推,第n次纠偏时(n=1,3,5,7
……
),第一次的坐标为:xn=x0 s3,反向移动的坐标为:xn 1=x0 s3-s2;第m次纠偏时(n=2,4,6,8
……
),第一次的坐标为:xm=x0-s3,反向移动的坐标为:xm 1=x0-s3 s2。如果出叉机构不是联动方式,la》l0则la伸出的距离为l0,如果lb》l0则lb伸出的距离为l0。
64.在一个实施例中,如图6所示,本公开提供一种穿梭车控制装置60,包括距离检测模块61、货物处理模块62和纠偏处理模块63。距离检测模块61控制穿梭车到达指定位置,并控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离;其中,第一测距装置和第二测距装置分别安装在穿梭车并行设置的第一出叉机构和第二出叉机构上。
65.货物处理模块62将第一距离和第二距离分别与目标正常距离阈值进行第一比较处理,基于第一比较处理结果确定是否能够控制第一出叉机构和第二出叉机构进行货物处理。在确定不能控制第一出叉机构和第二出叉机构进行货物处理的状态下,纠偏处理模块63将第一距离和第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制穿梭车进行纠偏处理。
66.在一个实施例中,本公开提供一种用于穿梭车的货物纠偏控制方法。控制穿梭车到达指定位置,并控制第一出叉机构和第二出叉机构分别伸出第二出叉长度,控制穿梭车前、后移动,用以对货物进行纠偏处理。
67.控制穿梭车前、后移动可以采用多种方法,例如,基于前移距离设定值和后移距离设置值,控制穿梭车进行至少一次前、后移动,直至第一距离大于目标正常距离阈值,并且第二距离大于目标正常距离阈值。
68.控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离、第一测距装置和第二测距装置分别安装在穿梭车并行设置的第一出叉机构和第二出叉机构上;将第一距离和第二距离分别与目标正常距离阈值进行第一比较处理,基于第一比较处理结果确定是否能够控制第一出叉机构和第二出叉机构进行货物处理。
69.在确定不能控制第一出叉机构和第二出叉机构进行货物处理的状态下,将第一距离和第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制控制第一出叉机构和第二出叉机构分别伸出第二出叉长度。
70.如果第一距离大于目标正常距离阈值,并且第二距离大于目标正常距离阈值,则
确定能够控制第一出叉机构和第二出叉机构分别伸出第二出叉长度。在第一距离和第二距离中选取较短的距离;将较短的距离与测量误差阈值的差作为第二出叉长度。
71.在一个实施例中,如图7所示,货物处理模块62包括取货判断单元621和倍程处理单元622。如果第一距离大于目标正常距离阈值,并且第二距离大于目标正常距离阈值,则取货判断单元621确定能够控制第一出叉机构和第二出叉机构进行货物处理。倍程处理单元622控制第一出叉机构和第二出叉机构分别伸出第一出叉长度,其中,第一出叉长度与目标正常距离阈值相等。
72.在一个实施例中,如图8所示,纠偏处理模块63包括:纠偏判断单元631、异常上报单元632和机构控制单元633。如果第一距离小于纠偏距离阈值,或者第二距离小于纠偏距离阈值,则纠偏判断单元631确定不能控制穿梭车进行纠偏处理。异常上报单元632在确定不能控制穿梭车进行纠偏处理的状态下,上报搬运目标摆放异常信息。机构控制单元633基于第一距离和第二距离,控制第一出叉机构和第二出叉机构分别伸出第二出叉长度,并控制穿梭车前、后移动。
73.例如,机构控制单元633在第一距离和第二距离中选取较短的距离,将较短的距离与测量误差阈值的差作为第二出叉长度。机构控制单元633基于前移距离设定值和后移距离设置值,控制穿梭车进行至少一次前、后移动,直至第一距离大于目标正常距离阈值,并且第二距离大于目标正常距离阈值。
74.图9为根据本公开的穿梭车控制装置的另一个实施例的模块示意图。如图9所示,该装置可包括存储器91、处理器92、通信接口93以及总线94。存储器91用于存储指令,处理器92耦合到存储器91,处理器92被配置为基于存储器91存储的指令执行实现上述的穿梭车控制方法。
75.存储器91可以为高速ram存储器、非易失性存储器(non-volatile memory)等,存储器91也可以是存储器阵列。存储器91还可能被分块,并且块可按一定的规则组合成虚拟卷。处理器92可以为中央处理器cpu,或专用集成电路asic(application specific integrated circuit),或者是被配置成实施本公开的穿梭车控制方法的一个或多个集成电路。
76.在一个实施例中,本公开提供一种穿梭车,包括如上任一实施例中的穿梭车控制装置。
77.在一个实施例中,本公开提供一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,指令被处理器执行时实现如上任一个实施例中的穿梭车控制方法。
78.在一个实施例中,本公开提供一种用于穿梭车的货物纠偏控制装置,包括:存储器、处理器、通信接口以及总线。存储器用于存储指令,处理器耦合到存储器,处理器被配置为基于存储器存储的指令执行实现上述的用于穿梭车的货物纠偏控制方法。
79.存储器可以为高速ram存储器、非易失性存储器(non-volatile memory)等,存储器也可以是存储器阵列。存储器还可能被分块,并且块可按一定的规则组合成虚拟卷。处理器可以为中央处理器cpu,或专用集成电路asic(application specific integrated circuit),或者是被配置成实施本公开的用于穿梭车的货物纠偏控制方法的一个或多个集成电路。
80.上述实施例中的穿梭车控制方法、装置、穿梭车以及存储介质,能够检测到搬运目
标倾斜并能够对搬运目标进行位置纠正处理,能够使穿梭车稳定取箱,降低运送搬运目标失败的概率,提高了物流的安全性和可靠性,提高了客户的使用感受度。
81.可能以许多方式来实现本公开的方法和系统。例如,可通过软件、硬件、固件或者软件、硬件、固件的任何组合来实现本公开的方法和系统。用于方法的步骤的上述顺序仅是为了进行说明,本公开的方法的步骤不限于以上具体描述的顺序,除非以其它方式特别说明。此外,在一些实施例中,还可将本公开实施为记录在记录介质中的程序,这些程序包括用于实现根据本公开的方法的机器可读指令。因而,本公开还覆盖存储用于执行根据本公开的方法的程序的记录介质。
82.本公开的描述是为了示例和描述起见而给出的,而并不是无遗漏的或者将本公开限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显然的。选择和描述实施例是为了更好说明本公开的原理和实际应用,并且使本领域的普通技术人员能够理解本公开从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。