技术特征:
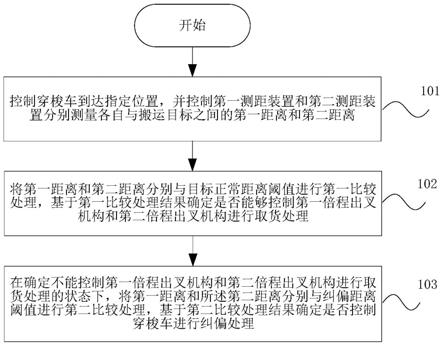
1.一种穿梭车控制方法,包括:控制穿梭车到达指定位置,并控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离;其中,所述第一测距装置和所述第二测距装置分别安装在所述穿梭车并行设置的第一出叉机构和第二出叉机构上;将所述第一距离和所述第二距离分别与目标正常距离阈值进行第一比较处理,基于第一比较处理结果确定是否能够控制所述第一出叉机构和第二出叉机构进行货物处理;在确定不能控制所述第一出叉机构和第二出叉机构进行货物处理的状态下,将所述第一距离和所述第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制所述穿梭车进行纠偏处理。2.如权利要求1所述的方法,所述基于第一比较处理结果确定是否能够控制所述第一出叉机构和第二出叉机构进行货物处理包括:如果所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值,则确定能够控制所述第一出叉机构和第二出叉机构进行货物处理。3.如权利要求2所述的方法,所述控制所述第一出叉机构和所述第二出叉机构进行货物处理包括:控制所述第一出叉机构和所述第二出叉机构分别伸出第一出叉长度,其中,所述第一出叉长度与所述目标正常距离阈值相等。4.如权利要求1所述的方法,所述基于第二比较处理结果确定是否控制所述穿梭车进行纠偏处理包括:如果所述第一距离小于所述纠偏距离阈值,或者所述第二距离小于所述纠偏距离阈值,则确定不能控制所述穿梭车进行纠偏处理。5.如权利要求4所述的方法,还包括:在确定不能控制所述穿梭车进行纠偏处理的状态下,上报所述搬运目标摆放异常信息。6.如权利要求2所述的方法,所述控制所述穿梭车进行纠偏处理包括:基于所述第一距离和所述第二距离,控制所述第一出叉机构和所述第二出叉机构分别伸出第二出叉长度,并控制所述穿梭车前、后移动。7.如权利要求6所述的方法,所述基于所述第一距离和所述第二距离,控制所述第一出叉机构和所述第二出叉机构分别伸出第二出叉长度包括:在所述第一距离和所述第二距离中选取较短的距离;将所述较短的距离与测量误差阈值的差作为所述第二出叉长度。8.如权利要求6所述的方法,所述控制所述穿梭车前、后移动包括:基于前移距离设定值和后移距离设置值,控制所述穿梭车进行至少一次前、后移动,直至所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值。9.如权利要求1至8任一项所述的方法,其中,所述搬运目标包括:货箱;所述第一测距装置和所述第二测距装置包括:激光测距装置。
10.一种穿梭车控制装置,包括:距离检测模块,用于控制穿梭车到达指定位置,并控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离;其中,所述第一测距装置和所述第二测距装置分别安装在所述穿梭车并行设置的第一出叉机构和第二出叉机构上;货物处理模块,用于将所述第一距离和所述第二距离分别与目标正常距离阈值进行第一比较处理,基于第一比较处理结果确定是否能够控制所述第一出叉机构和第二出叉机构进行货物处理;纠偏处理模块,用于在确定不能控制所述第一出叉机构和第二出叉机构进行货物处理的状态下,将所述第一距离和所述第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制所述穿梭车进行纠偏处理。11.如权利要求10所述的装置,其中,所述货物处理模块,包括:取货判断单元,用于如果所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值,则确定能够控制所述第一出叉机构和第二出叉机构进行货物处理。12.如权利要求11所述的装置,其中,所述货物处理模块,包括:倍程处理单元,用于控制所述第一出叉机构和所述第二出叉机构分别伸出第一出叉长度,其中,所述第一出叉长度与所述目标正常距离阈值相等。13.如权利要求10所述的装置,其中,所述纠偏处理模块,包括:纠偏判断单元,用于如果所述第一距离小于所述纠偏距离阈值,或者所述第二距离小于所述纠偏距离阈值,则确定不能控制所述穿梭车进行纠偏处理。14.如权利要求13所述的装置,其中,所述纠偏处理模块,包括:异常上报单元,用于在确定不能控制所述穿梭车进行纠偏处理的状态下,上报所述搬运目标摆放异常信息。15.如权利要求11所述的装置,其中,所述纠偏处理模块,包括:机构控制单元,用于基于所述第一距离和所述第二距离,控制所述第一出叉机构和所述第二出叉机构分别伸出第二出叉长度,并控制所述穿梭车前、后移动。16.如权利要求15所述的装置,其中,所述机构控制单元,用于在所述第一距离和所述第二距离中选取较短的距离;将所述较短的距离与测量误差阈值的差作为所述第二出叉长度。17.如权利要求15所述的装置,其中,所述机构控制单元,用于基于前移距离设定值和后移距离设置值,控制所述穿梭车进行至少一次前、后移动,直至所述第一距离大于所述目标正常距离阈值,并且所述第二距离大于所述目标正常距离阈值。18.如权利要求10至17任一项所述的装置,其中,
所述搬运目标包括:货箱;所述第一测距装置和所述第二测距装置包括:激光测距装置。19.一种穿梭车控制装置,包括:存储器;以及耦接至所述存储器的处理器,所述处理器被配置为基于存储在所述存储器中的指令,执行如权利要求1至9中任一项所述的方法。20.一种穿梭车,包括:如权利要求10至19任一项所述的穿梭车控制装置。21.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述指令被处理器执行如权利要求1至9中任一项所述的方法。
技术总结
本公开提供了一种穿梭车控制方法、装置、穿梭车以及存储介质,其中的方法包括:控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离,基于第一距离和第二距离分别与目标正常距离阈值进行第一比较处理的结果确定是否能够进行货物处理;在确定不能进行货物处理的状态下,将第一距离和第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制穿梭车进行纠偏处理。本公开的方法、装置、穿梭车以及存储介质,能够检测到搬运目标倾斜并能够对搬运目标进行位置纠正处理,能够使穿梭车稳定取箱,降低运送搬运目标失败的概率,提高了物流的安全性和可靠性,提高了客户的使用感受度。度。度。
技术研发人员:刘旭 者文明 张涛 黄民 商春鹏
受保护的技术使用者:北京京东乾石科技有限公司
技术研发日:2022.01.12
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。