1.本发明涉及垃圾桶技术领域,具体涉及一种智能化垃圾桶。
背景技术:
2.垃圾桶,作为人类生活中不可或缺的必需品,又名废物箱或垃圾箱,是指装放垃圾的容器。多数以金属或塑胶制,用时放入塑料袋,当垃圾一多便可扎起塑料袋丢掉。随着人们环保意识的普遍提高,垃圾桶也逐渐向智能化方向发展。然而,现有市场上的智能垃圾桶在使用时,在对垃圾袋进行打包封口时仍需手动操作,体验感差的同时费时费力。
技术实现要素:
3.针对上述问题,本发明提出一种智能化垃圾桶,便于对垃圾袋进行打包封口,避免了人工手动操作,省时省力,提高了体验感。
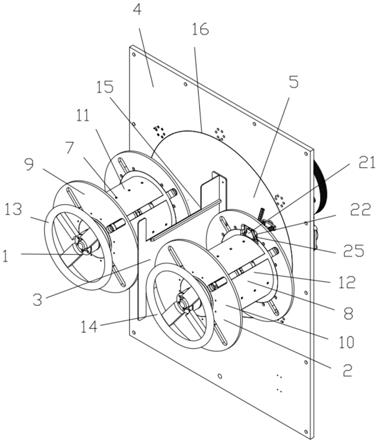
4.本发明提供了一种智能化垃圾桶,包括垃圾桶和打包机构;
5.所述打包机构放置在所述垃圾桶上;
6.所述打包机构包括底板、盖体、收缩机构和封口机构,盖体扣合在底板上,底板的中部设有第一通孔,盖体设有第二通孔,第一通孔、第二通孔和垃圾桶同轴向中心线;收缩机构和封口机构均安装在底板上,收缩机构位于封口机构的上方,收缩机构用于对垃圾桶内垃圾袋的上端进行封口,封口机构用于对垃圾袋的封口处进行打结。
7.优选地,所述封口机构包括第一滑动机构、第二滑动机构和打结机构,第一滑动机构和第二滑动机构均安装在底板上,第一滑动机构和第二滑动机构呈平行布置且位于第一通孔的两侧;
8.所述打结机构包括第一滑动块、第二滑动块、导向轮、卷装胶带、辅助机构和触发切割机构,第一滑动块滑动配合在第一滑动机构上,第二滑动块滑动配合在第二滑动机构上,第一滑动机构和第二滑动机构分别驱动第一滑动块和第二滑动块做同步往复直线移动;第一滑动块和第二滑动块之间设有过道;第一滑动块的靠第二滑动块一侧设有敞口的第一安装腔,导向轮配设有转动连接且同轴的导向轴,导向轴的两端与第一安装腔的内部连接,导向轮的一部分位于过道内;第一安装腔的远第二滑动块一侧设有安装轴,卷装胶带套设在安装轴上;第二滑动块的靠第一滑动块一侧设有敞口的第二安装腔,辅助机构安装在第二安装腔,辅助机构的接触端布置在过道内,辅助机构与导向轮呈相对布置,卷装胶带的活动端绕过导向轮与辅助机构的接触端粘接;
9.所述触发切割机构安装在第一安装腔内,触发切割机构位于导向轮的后端,且触发切割机构的触发端置于过道内;当触发切割机构的触发端受到触动时,触发切割机构对过道内的胶带进行切割。
10.优选地,所述辅助机构包括辅助块和辅助拉簧,辅助块的一端设有转动连接的辅助轴,辅助轴的两端与第二安装腔的内壁连接;第二安装腔的远第一滑动块一侧设有辅助挡板,辅助挡板与辅助轴相对应,辅助拉簧的两端分别与辅助挡板和辅助块的靠辅助轴一
端连接;第二安装腔的第一滑动块一侧设有辅助限位销,辅助块与辅助限位销相抵,辅助块的另一端位于过道内,辅助块与导向轮呈相对布置;卷装胶带的活动端绕过导向轮与辅助块的另一端粘接。
11.优选地,所述触发切割机构包括横向矩形杆、第一安装座、第二安装座、转动套、拨动块、触发弹簧和转动拉簧,第一安装座和第二安装座均安装在第一安装腔内,第一安装座和第二安装座均设有横向贯穿的矩形孔,横向矩形杆与第一安装座和第二安装座的矩形孔横向滑动配合,横向矩形杆上设有限位板,限位板位于第一安装座和第二安装座之间,触发弹簧套设在横向矩形杆上,触发弹簧的两端分别与第一安装座与限位板相抵,横向矩形杆的靠过道一端设有刀刃;转动套设有转动连接的转动轴,转动轴的两端与第一安装腔的内壁连接,横向矩形杆位于导向轮和转动套之间;拨动块的一端与转动套连接,拨动块的另一端位于过道内;转动套上设有牵引杆,牵引杆设有贯穿的条形槽,条形槽内设有滑动配合的滑动销,第一安装腔内设有安装块,转动拉簧的一端与安装块连接,转动拉簧的另一端与滑动销连接;
12.所述导向轮上设有六个呈周向均布的弧形凹槽,相邻两个弧形凹槽之间形成凸起隔板,凸起隔板上设有延伸板;横向矩形杆的靠导向轮一侧设有立板,立板位于导向轮的后方;转动套上设有楔形挡块,横向矩形杆的靠转动套一侧设有与楔形挡块配合的楔形限位块;
13.当导向轮转动时,导向轮的延伸板会与横向矩形杆的立板接触,并带动横向矩形杆的刀刃端离开过道;导向轮的延伸板与横向矩形杆的立板脱离时,横向矩形杆的楔形限位块的直角面与转动套的楔形挡块的直角面相抵,拨动块位于过道内;拨动块受触动向后转动时,横向矩形杆的楔形限位块与转动套的楔形挡块脱离,横向矩形杆在触发弹簧的作用下向过道移动对过道内的胶带进行切割。
14.优选地,所述第一滑动机构包括第一导向杆、第一丝杆、第一驱动机构和两个安装座,两个安装座均与底板连接,第一导向杆的两端分别与两个安装座连接,第一丝杆的两端分别与两个安装座转动连接;第一滑动块设有与过道平行的第一滑动孔和第一螺纹孔,第一滑动块的第一滑动孔与第一导向杆滑动配合,第一滑动块的第一螺纹孔与第一丝杆螺纹连接;第一驱动机构安装在底板上,第一驱动机构用于驱动第一丝杆转动。
15.优选地,所述第二滑动机构包括第二导向杆、第二丝杆、第二驱动机构和两个安装座,两个安装座均与底板连接,第二导向杆的两端分别与两个安装座连接,第二丝杆的两端分别与两个安装座转动连接;第二滑动块设有与过道平行的第二滑动孔和第二螺纹孔,第二滑动块的第二滑动孔与第二导向杆滑动配合,第二滑动块的第二螺纹孔与第二丝杆螺纹连接;第二驱动机构安装在底板上,第二驱动机构用于驱动第二丝杆转动。
16.优选地,所述第一滑动块的靠过道侧的前进端设有第一倒角,第二滑动块的靠过道侧的前进端设有第二倒角。
17.优选地,所述收缩机构包括第一支架、第二支架、第三支架、第四支架、第一收缩双向丝杆、第二收缩双向丝杆、第一收缩导杆、第二收缩导杆、第三驱动机构、第四驱动机构、两根第一挤靠杆和两根第二挤靠杆,第一支架、第二支架、第三支架和第四支架依次安装在底板的四个角部;
18.所述第一收缩双向丝杆的两端分别与第一支架和第二支架转动连接,第一收缩导
第一滑动块,206-第二滑动块,207-导向轮,208-卷装胶带,209-过道,210-第一安装腔,211-第二安装腔,212-辅助块,213-辅助拉簧,214-辅助挡板,215-辅助限位销,216-横向矩形杆,217-第一安装座,218-第二安装座,219-转动套,220-拨动块,221-触发弹簧,222-转动拉簧,223-限位板,224-牵引杆,225-条形槽,226-滑动销,227-安装块,228-弧形凹槽,229-延伸板,230-立板,231-楔形挡块,232-楔形限位块,233-第一导向杆,234-第一丝杆,235-第一驱动机构,236-安装座,237-第二导向杆,238-第二丝杆,239-第二驱动机构,240-第一倒角,241-第二倒角,242-弧形挡板,3-收缩机构,301-第一支架,302-第二支架,303-第三支架,304-第四支架,305-第一收缩双向丝杆,306-第二收缩双向丝杆,307-第一收缩导杆,308-第二收缩导杆,309-第三驱动机构,310-第四驱动机构,311-第一挤靠杆,312-第二挤靠杆,313-条形孔。
具体实施方式
35.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
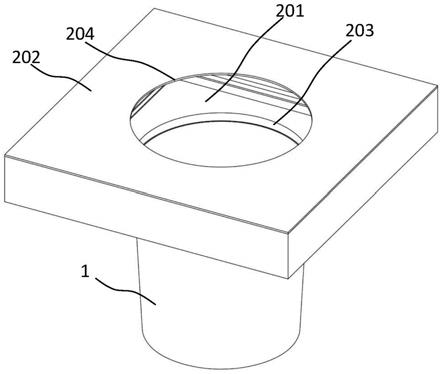
36.如图1至图7所示,本实施例提供的一种智能化垃圾桶,包括垃圾桶1和打包机构2;打包机构2放置在垃圾桶1上;打包机构2包括底板201、盖体202、收缩机构3和封口机构,盖体202扣合在底板201上,底板201的中部设有第一通孔203,盖体202设有第二通孔204,第一通孔203、第二通孔204和垃圾桶1同轴向中心线。收缩机构3和封口机构均安装在底板201上,收缩机构3位于封口机构的上方,收缩机构3用于对垃圾桶1内垃圾袋的上端进行封口,封口机构用于对垃圾袋的封口处进行打结。
37.该技术方案通过收缩机构3将垃圾桶1内垃圾袋的上端进行封口,再通过封口机构对垃圾袋的封口处进行打结,从而实现对垃圾袋的打包封口,避免了人工手动操作,省时省力,提高了体验感。
38.其中,封口机构包括第一滑动机构、第二滑动机构和打结机构,第一滑动机构和第二滑动机构均安装在底板201上,第一滑动机构和第二滑动机构呈平行布置且位于第一通孔203的两侧。打结机构包括第一滑动块205、第二滑动块206、导向轮207、卷装胶带208、辅助机构和触发切割机构,第一滑动块205滑动配合在第一滑动机构上,第二滑动块206滑动配合在第二滑动机构上,第一滑动机构和第二滑动机构分别驱动第一滑动块205和第二滑动块206做同步往复直线移动。
39.第一滑动块205和第二滑动块206之间设有过道209;第一滑动块205的靠第二滑动块一侧设有敞口的第一安装腔210,导向轮207配设有转动连接且同轴的导向轴,导向轴的两端与第一安装腔210的内部连接,导向轮207的一部分位于过道209内;第一安装腔210的远第二滑动块一侧设有安装轴,卷装胶带208套设在安装轴上。第二滑动块206的靠第一滑动块一侧设有敞口的第二安装腔211,辅助机构安装在第二安装腔211,辅助机构的接触端布置在过道209内,辅助机构与导向轮207呈相对布置,卷装胶带208的活动端绕过导向轮207与辅助机构的接触端粘接。触发切割机构安装在第一安装腔210内,触发切割机构位于导向轮207的后端,且触发切割机构的触发端置于过道209内;当触发切割机构的触发端受到触动时,触发切割机构对过道内的胶带进行切割。
40.该技术方案中卷装胶带208的活动端绕过导向轮207与辅助机构的接触端粘接,导向轮207对卷装胶带208的胶带进行支撑,卷装胶带208的粘接面与导向轮207背离,第一滑动机构和第二滑动机构分别驱动第一滑动块205和第二滑动块206向垃圾袋的封口处做同步直线移动时,垃圾袋的封口处先与导向轮207上的卷装胶带208接触实现粘接,然后垃圾袋的封口处相对过道209向后移动接触辅助机构,辅助机构上粘接的胶带与垃圾袋的封口处的胶带在过道和辅助机构的作用下实现粘接;当垃圾袋的封口处继续相对过道209向后移动碰触触发切割机构的触发端,触发切割机构对过道内的胶带进行切割,同时使辅助机构附近的胶带粘接到辅助机构的接触端;第一滑动机构和第二滑动机构继续带动第一滑动块205和第二滑动块206向前移动到第一通孔203的另一侧,使垃圾袋的封口处脱离过道209,以便于将垃圾袋从垃圾桶1内取出,整个过程方便快捷。同时,取出垃圾桶1内的垃圾袋后,第一滑动机构和第二滑动机构继续带动第一滑动块205和第二滑动块206回到起始位置。
41.其次,辅助机构包括辅助块212和辅助拉簧213,辅助块212的一端设有转动连接的辅助轴,辅助轴的两端与第二安装腔211的内壁连接;第二安装腔211的远第一滑动块一侧设有辅助挡板214,辅助挡板214与辅助轴相对应,辅助拉簧213的两端分别与辅助挡板214和辅助块212的靠辅助轴一端连接;第二安装腔211的第一滑动块一侧设有辅助限位销215,辅助块212与辅助限位销215相抵,辅助块212的另一端位于过道209内,辅助块212与导向轮207呈相对布置;卷装胶带208的活动端绕过导向轮207与辅助块212的另一端粘接。在辅助限位销215和辅助拉簧213的共同作用下,辅助块212在过道209的一端在收到推力退回第二安装腔211内后会自动回到过道209内。
42.再次,触发切割机构包括横向矩形杆216、第一安装座217、第二安装座218、转动套219、拨动块220、触发弹簧221和转动拉簧222,第一安装座217和第二安装座218均安装在第一安装腔210内,第一安装座217和第二安装座218均设有横向贯穿的矩形孔,横向矩形杆216与第一安装座217和第二安装座218的矩形孔横向滑动配合,横向矩形杆216上设有限位板223,限位板223位于第一安装座217和第二安装座218之间,触发弹簧221套设在横向矩形杆216上,触发弹簧221的两端分别与第一安装座217与限位板223相抵,横向矩形杆216的靠过道一端设有刀刃。转动套219设有转动连接的转动轴,转动轴的两端与第一安装腔210的内壁连接,横向矩形杆216位于导向轮207和转动套219之间;拨动块220的一端与转动套219连接,拨动块220的另一端位于过道209内。转动套219上设有牵引杆224,牵引杆224设有贯穿的条形槽225,条形槽225内设有滑动配合的滑动销226,第一安装腔210内设有安装块227,转动拉簧222的一端与安装块227连接,转动拉簧222的另一端与滑动销226连接。
43.导向轮207上设有六个呈周向均布的弧形凹槽228,相邻两个弧形凹槽228之间形成凸起隔板,凸起隔板上设有延伸板229;横向矩形杆216的靠导向轮一侧设有立板230,立板230位于导向轮207的后方;转动套219上设有楔形挡块231,横向矩形杆216的靠转动套一侧设有与楔形挡块231配合的楔形限位块232。当导向轮207转动时,导向轮207的延伸板229会与横向矩形杆216的立板230接触,并带动横向矩形杆216的刀刃端离开过道;导向轮207的延伸板229与横向矩形杆216的立板230脱离时,横向矩形杆216的楔形限位块232的直角面与转动套219的楔形挡块231的直角面相抵,拨动块220位于过道209内;拨动块220受触动向后转动时,横向矩形杆216的楔形限位块232与转动套219的楔形挡块231脱离,横向矩形
杆216在触发弹簧221的作用下向过道209移动对过道209内的胶带进行切割。此外,弧形凹槽228的设计,便于垃圾袋的封口处导入其中并带动导向轮207转动,避免导向轮207与胶带出现打滑的现象。
44.该技术方案通过设计转动拉簧222与牵引杆224上条形槽225内的滑动销226配合,以实现对转动套219和楔形挡块231的有效支撑和平衡,保证转动套219的楔形挡块231对横向矩形杆216的楔形限位块232进行有效顶靠。
45.本实施例中,第一滑动机构包括第一导向杆223、第一丝杆224、第一驱动机构225和两个安装座226,两个安装座226均与底板201连接,第一导向杆223的两端分别与两个安装座226连接,第一丝杆224的两端分别与两个安装座226转动连接。第一滑动块205设有与过道平行的第一滑动孔和第一螺纹孔,第一滑动块205的第一滑动孔与第一导向杆223滑动配合,第一滑动块205的第一螺纹孔与第一丝杆224螺纹连接;第一驱动机构225安装在底板201上,第一驱动机构225用于驱动第一丝杆224转动。第一驱动机构225采用电机和齿轮传动组合带动第一丝杆224转动,属于现有技术,再次不在赘述。
46.本实施例中,第二滑动机构包括第二导向杆237、第二丝杆238、第二驱动机构239和两个安装座,两个安装座均与底板201连接,第二导向杆237的两端分别与两个安装座连接,第二丝杆238的两端分别与两个安装座转动连接;第二滑动块206设有与过道平行的第二滑动孔和第二螺纹孔,第二滑动块206的第二滑动孔与第二导向杆237滑动配合,第二滑动块206的第二螺纹孔与第二丝杆238螺纹连接;第二驱动机构239安装在底板201上,第二驱动机构239用于驱动第二丝杆238转动。第二驱动机构239采用电机和齿轮传动组合带动第二丝杆238转动,属于现有技术,再次不在赘述。
47.为了便于垃圾袋的封口处顺利进入过道209内,第一滑动块205的靠过道侧的前进端设有第一倒角240,第二滑动块206的靠过道侧的前进端设有第二倒角241。
48.此外,收缩机构3包括第一支架301、第二支架302、第三支架303、第四支架304、第一收缩双向丝杆305、第二收缩双向丝杆306、第一收缩导杆307、第二收缩导杆308、第三驱动机构309、第四驱动机构310、两根第一挤靠杆311和两根第二挤靠杆312,第一支架301、第二支架302、第三支架303和第四支架304依次安装在底板201的四个角部。第一收缩双向丝杆305的两端分别与第一支架301和第二支架302转动连接,第一收缩导杆307的两端分别与第三支架303和第四支架304连接,第一收缩双向丝杆305和第一收缩导杆307位于第一通孔203的两侧且呈平行布置。第一挤靠杆311的两端分别设有滑动套和螺母,两根第一挤靠杆311的螺母分别与第一收缩双向丝杆305的两端螺纹连接,两根第一挤靠杆311的滑动套均与第一收缩导杆307滑动配合;第三驱动机构309安装在第一支架301上,第三驱动机构309用于驱动第一收缩双向丝杆305转动。本实施例中,第三驱动机构309采用电机和齿轮传动组合带动第一收缩双向丝杆305转动,属于现有技术,再次不在赘述。
49.第二收缩双向丝杆306的两端分别与第一支架301和第四支架304转动连接,第二收缩导杆308的两端分别与第二支架302和第三支架303连接,第二收缩双向丝杆306和第二收缩导杆308位于第一通孔203的两侧且呈平行布置;第二挤靠杆312的两端分别设有滑动套和螺母,两根第二挤靠杆312的螺母分别与第二收缩双向丝杆306的两端螺纹连接,两根第二挤靠杆312的滑动套均与第二收缩导杆308滑动配合。第四驱动机构310安装在第四支架304上,第四驱动机构310用于驱动第二收缩双向丝杆308转动;第一挤靠杆311和第二挤
靠杆312呈垂直布置。本实施例中,第四驱动机构310采用电机和齿轮传动组合带动第二收缩双向丝杆306转动,属于现有技术,再次不在赘述。
50.该技术方案通过第三驱动机构309带动第一收缩双向丝杆305转动,以实现两根第一挤靠杆311向中心靠拢;再通过第四驱动机构310带动第二收缩双向丝杆306转动,以实现两根第二挤靠杆312向中心靠拢;从而实现收缩机构3对垃圾桶1内垃圾袋的上端进行封口,以便于封口机构对垃圾袋的封口处进行打结,整个过程操作简单便捷。
51.本实施例中,为了节省第一挤靠杆311和第二挤靠杆312组合后的占用空间,第一挤靠杆311沿其长度方向设有贯穿的条形孔313,第二挤靠杆312活动配合在第一挤靠杆311的条形孔313内。而且,底板201的底部设有环形防滑垫,以提高底板201与垃圾桶1之间的摩擦力。同时,底板201设有多个沿第一通孔203为中心且周向均布的弧形挡板242,弧形挡板242在底板201上可沿底板的径向适应性调整位置,及即可在弧形挡板242和底板201相互滑动的基础上加设一个压缩弹簧,使弧形挡板242在压缩弹簧的用下与垃圾桶1的对应外部轮廓紧贴,可进一步提高底板201与垃圾桶1配合后牢固性;而且在底板201上弧形挡板242与压缩弹簧配合,可适应多种规格的垃圾桶,进一步提高了实用性。
52.需要说明的是,以上优选实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。