1.本发明属于车辆自动泊车技术领域,具体涉及一种基于车载机器人的自动泊车系统。
背景技术:
2.当前自动泊车技术已得到广泛使用,泊车过程中车辆停放的位姿情况和轨迹规划已成为衡量泊车性能的重要评价标准,智能机器人技术的发展提供了其与车辆更广阔的融合开发前景。在现有的自动泊车过程中,车身稳定系统所提供的由轮速脉冲传感器感知的整车速度信息、整车横摆角度存在误差,同时车辆感知系统基于车身稳定系统等构建的泊车坐标系系统也存在一定误差,且车辆感知系统对环境的感知存在一定的盲区,从而导致泊车位姿不佳,容易出现车辆停放不正的问题。因此,如何设计一种自动泊车系统,以避免出现上述问题,成为本领域技术人员急需解决的技术问题。
技术实现要素:
3.本发明的目的是提供一种基于车载机器人的自动泊车系统,以解决现有技术中的上述技术问题。
4.为实现上述目的,本发明提供了如下技术方案:
5.一种基于车载机器人的自动泊车系统,其包括车辆、停放于所述车辆上的车载机器人,所述车载机器人与所述车辆通信连接;在需要泊车时,所述车辆将离车指令发送至所述车载机器人,所述车载小型机器人接收到该离车指令后,从所述车辆的底部驶出,而后所述车载机器人根据采集的信息建立实况场景地图,根据所述实况场景地图规划泊车路径,并将该泊车路径发送给所述车辆,使所述车辆根据所述泊车路径进行自动行驶和泊车;在所述车辆完成泊车后,所述车载机器人由所述车辆的底部驶回所述车辆中。
6.优选地,所述车载机器人包括车体模块、感知模块、行车控制决策模块、信息传输模块,其中,
7.所述车体模块:包括用于保证所述车载机器人离开所述车辆后可以自行行驶的履带轮、安装有传感器的车体、用于驱动所述履带轮转动的动力驱动单元、用于向所述动力驱动单元供电的电池供电系统;
8.所述感知模块:用于采集车载机器人在行驶过程中的障碍物信息、路况信息、目标物信息,并根据所采集到的上述信息建立实况场景地图;
9.行车控制决策模块:当确认泊车车位信息后,根据所述实况场景地图规划至少一条泊车路径;车载机器人的位置作为所规划的泊车路径中的绝对坐标零点和所述实况场景地图的建图起始点;
10.信息传输模块:用于与所述车辆进行通信,实时获取泊车过程中所述车辆的自身信息,并将所述泊车路径发送给车辆,根据所述车辆的自身信息对车辆进行实时控制,以使得所述车辆按所述泊车路径运行。
11.优选地,所述车辆的自身信息包括:方向盘转角信号、档位信号、车身稳定模块中与泊车相关的信息。
12.优选地,所述车载机器人停在泊车车位附近。
13.优选地,所述车载机器人采集的信息包括自身行驶过程中采集的信息和所述车辆的感知系统采集的车辆周围环境信息,所述车载机器人将自身行驶过程中采集的信息和所述车辆周围环境信息进行融合对比,而后建立所述实况场景地图。
14.优选地,所述车辆周围环境信息包括所述车辆周围的车辆信息、障碍物信息、目标物信息、车道线信息、车位线信息和交通标识信息。
15.优选地,所述车辆的底部设置有用于停放所述车载机器人并给所述车载机器人充电的舱门,在所述车辆发出所述离车指令时,所述舱门开启,所述车载机器人从所述车辆的底部驶出。
16.本发明的有益效果在于:
17.本发明的基于车载机器人的自动泊车系统,其通过车载机器人建立实况场景地图,并根据该实况场景地图规划泊车路径,而后将该泊车路径发送给车辆,使得车辆按照泊车路径自动泊车,从而能够较好地避免现有技术中车辆稳定系统和车辆感知系统的上述缺点,使得泊车位姿较佳,不易出现车辆停放不正的问题。
附图说明
18.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,并将结合附图对本发明的具体实施例作进一步的详细说明,其中
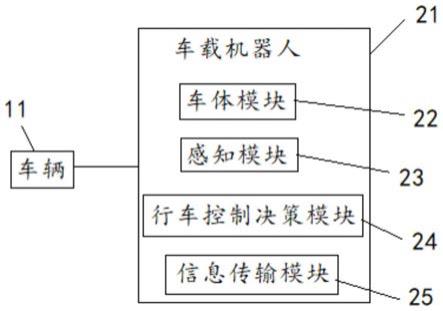
19.图1为本发明实施例提供的基于车载机器人的自动泊车系统的示意图。
20.附图中标记:
21.11、车辆,21、车载机器人,22、车体模块,23、感知模块,
22.24、行车控制决策模块,25、信息传输模块。
具体实施方式
23.为了使本领域技术人员更好地理解本发明的技术方案,下面将结合具体实施例对本方案作进一步地详细介绍。
24.如图1所示,本发明实施例提供了一种基于车载机器人的自动泊车系统,其包括车辆11、停放于所述车辆11上的车载机器人21,所述车载机器人21与所述车辆通信连接;在需要泊车时,所述车辆将离车指令发送至所述车载机器人,所述车载小型机器人接收到该离车指令后,从所述车辆的底部驶出,而后所述车载机器人根据采集的信息建立实况场景地图,根据所述实况场景地图规划泊车路径,并将该泊车路径发送给所述车辆,使所述车辆根据所述泊车路径进行自动行驶和泊车;在所述车辆完成泊车后,所述车载机器人由所述车辆的底部驶回所述车辆中。
25.本发明实施例提供的基于车载机器人的自动泊车系统,其通过车载机器人21建立实况场景地图,并根据该实况场景地图规划泊车路径,而后将该泊车路径发送给车辆,使得车辆按照泊车路径自动泊车,从而能够较好地避免现有技术中车辆稳定系统和车辆感知系
统的上述缺点,使得泊车位姿较佳,不易出现车辆停放不正的问题。
26.进一步地,所述车载机器人21包括车体模块22、感知模块23、行车控制决策模块24、信息传输模块25,其中,
27.所述车体模块22:包括用于保证所述车载机器人离开所述车辆后可以自行行驶的履带轮、安装有传感器的车体、用于驱动所述履带轮转动的动力驱动单元、用于向所述动力驱动单元供电的电池供电系统;
28.所述感知模块23:用于采集车载机器人在行驶过程中的障碍物信息、路况信息、目标物信息,并根据所采集到的上述信息建立实况场景地图;
29.行车控制决策模块24:当确认泊车车位信息后,根据所述实况场景地图规划至少一条泊车路径;车载机器人的位置作为所规划的泊车路径中的绝对坐标零点和所述实况场景地图的建图起始点;
30.信息传输模块25:用于与所述车辆进行通信,实时获取泊车过程中所述车辆的自身信息,并将所述泊车路径发送给车辆,根据所述车辆的自身信息对车辆进行实时控制,以使得所述车辆按所述泊车路径运行。
31.具体地,所述车辆11的自身信息包括:方向盘转角信号、档位信号、车身稳定模块中与泊车相关的信息。
32.可以优选,所述车载机器人21停在泊车车位附近。可以理解的是,车载机器人可以对规划出的各泊车路径进行对比分析,然后将最优的泊车路径发给车辆,控制车辆泊车。在一实施例中,车载机器人21也可以先停在泊车车位中,在泊车过程中,车载机器人逐渐后移直至位于泊车车位的后端外,在车载机器人移动的过程中实时建立实况场景地图,控制车辆按实时规划的泊车路径运行,直至完成泊车。在另一实施例中,车载机器人也可以在不离开车辆的情况下作为控制系统对车辆的泊车路径进行规划,在不离开车辆的情况下可以利用车辆所采集的周围环境信息进行泊车路径规划。泊车车位由车载机器人或者车辆感知系统获取环境信息后,由车载机器人决策后释放。也可以是,车载机器人驶出车辆底部后,在采集完成泊车车位周边的信息和泊车车位至车辆所在位置的信息后,再返回车辆中,规划完泊车路径后,控制车辆按照规划的泊车路径进行泊车。
33.具体地,所述车载机器人21采集的信息包括自身行驶过程中采集的信息和所述车辆的感知系统采集的车辆周围环境信息,所述车载机器人将自身行驶过程中采集的信息和所述车辆周围环境信息进行融合对比,而后建立所述实况场景地图,从而使得建立的实况场景地图更为完善,便于规划出较优的泊车路径。可以理解的是,车载机器人可以将远处的路况信息反馈给车辆,使得驾驶员可以提前获取前方路况信息。
34.进一步地,所述车辆周围环境信息包括所述车辆周围的车辆信息、障碍物信息、目标物信息、车道线信息、车位线信息和交通标识信息。
35.具体地,所述车辆11的底部设置有用于停放所述车载机器人并给所述车载机器人充电的舱门,在所述车辆发出所述离车指令时,所述舱门开启,所述车载机器人从所述车辆的底部驶出。
36.本发明提供了一种基于车载机器人的自动泊车系统,能够建立起车载机器人与车辆之间的坐标系系统,车载机器人自身行驶过程中采集的信息可以与车辆感知系统采集的信息进行融合对比,由车载机器人提供自动泊车过程中的实况场景地图和路径规划,并在
泊车过程中对车辆进行泊车轨迹控制。
37.以上仅是本发明的优选实施方式,需要指出的是,这些实施例仅用于说明本发明而不用于限制本发明的范围,而且,在阅读了本发明的内容之后,本领域相关技术人员可以对本发明做出各种改动或修改,这些等价形式同样落入本技术所附权利要求书所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。