1.本发明属于桥式起重机安全防护技术领域,涉及一种用于桥式起重机的断绳防坠装置及控制方法。
背景技术:
2.随着我国经济的快速发展,工业及建筑等领域对起重机的需求量也越来越大。其中,桥式起重机是使用范围最广、数量最多的一种。桥式起重机主要由桥架、大车运行机构、小车运行机构和起升机构等组成。目前,通用桥式起重机的起升机构的悬吊物均用钢丝绳吊在起重臂下面,悬吊物的升降由钢丝绳的提拉来实现,悬吊物的前移与后退可由起重臂上的滑车前后滑动来实现,钢丝绳在提拉的过程中需要绕过多个滑轮,由于长时间的摩擦,钢丝绳时常出现断裂,一旦检修不及时,就会出现断绳坠物的现象,造成不必要的损失或伤亡。例如在2014年5月28日16时,南通某重工有限公司的主结构车间,起重机主钩钢丝绳突然发生断裂,导致机器房底座变形,重伤一人,直接经济损失达50多万元。
技术实现要素:
3.本发明的目的是针对现有的技术存在上述问题,提出了一种用于桥式起重机的断绳防坠装置及控制方法。本发明解决的技术问题是如何避免桥式起重机因钢丝绳断裂而发生坠物安全事故。
4.本发明的目的可通过下列技术方案来实现:
5.一种用于桥式起重机的断绳防坠装置,包括壳体,其特征在于,壳体内可转动地设置有楔块座,楔块座上开设有供钢丝绳穿设的安装孔,安装孔内设置有楔块且楔块的较大端与壳体的内侧壁相抵接,当楔块座转动时,楔块能够在壳体内侧壁的顶推下向较小端插入安装孔内并将钢丝绳压紧在安装孔的孔壁上,本断绳防坠装置还包括控制单元,控制单元包括mcu、用于驱动楔块座转动且与mcu电连接的电机和用于实时检测钢丝绳应变且与mcu信号连接的检测组件,检测组件包括嵌设在钢丝绳内的光纤布拉格光栅传感器。
6.该用于桥式起重机的断绳防坠装置设置在桥式起重机的出入绳口,首先嵌设在钢丝绳内的光纤布拉格光栅传感器可以实时监测钢丝绳的应变,并将钢丝绳的应变数据实时传输给mcu,mcu通过数据处理能得到钢丝绳下一时刻张力的预测值,并将该预测值与预先设定的钢丝绳张力的阈值进行比较,如果该预测值超过阈值则由mcu进行报警并控制电机旋转,电机旋转后驱动楔块座转动,当楔块座转动后,因为楔块已经部分位于安装孔内,且楔块沿安装孔移动的方向与楔块座转动的方向成90
°
,因此楔块在壳体内侧壁的顶推下向较小端插入安装孔内,又因为楔块的较大端与壳体的内侧壁相抵接,所以楔块的较大部分能不断进入安装孔,所以位于安装孔内的楔块能挤压相邻侧的钢丝绳,直到位于安装孔内的楔块能将钢丝绳压紧在安装孔的孔壁上(即楔块已将钢丝绳卡死在安装孔内),从而能避免桥式起重机因钢丝绳断裂而发生坠物安全事故,另外,上述结构的断绳防坠装置也能避免钢丝绳与楔块之间的打滑,从而增强了本用于桥式起重机的断绳防坠装置安全性和稳定
性。
7.在上述的一种用于桥式起重机的断绳防坠装置中,所述钢丝绳包括中心丝与若干外层丝,在钢丝绳的中心丝上沿其长度方向开设有安装槽,所述光纤布拉格光栅传感器通过环氧树脂粘贴于安装槽内。
8.光纤布拉格光栅传感器具有体积小、重量轻、高抗拉、高抗压、防水防油、全密封等特点,且弯曲半径较小,光纤布拉格光栅传感器通过环氧树脂粘贴于安装槽内,使得安装后的光纤布拉格光栅传感器不易脱落,并且不易损坏,也不影响光纤布拉格光栅传感器对钢丝绳应变的检测,钢丝绳包括中心丝与若干外层丝,将光纤布拉格光栅传感器设置在钢丝绳的中心丝上,可以对钢丝绳的应变进行更精准的检测,另外若干外层丝是缠绕在中心丝上,将光纤布拉格光栅传感器设置在钢丝绳的中心丝上更加便捷。
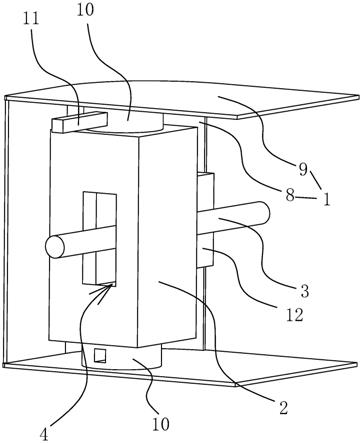
9.在上述的一种用于桥式起重机的断绳防坠装置中,所述壳体包括位于侧部且具有弧形段的轨道板,所述楔块的较大端与轨道板的内壁相抵接,所述楔块的较大端的端面呈与轨道板弧形段的内壁相适配的弧形,所述安装孔与轨道板弧形段内壁之间的距离随着楔块座的转动能逐渐变小,所述楔块中部的宽度与钢丝绳的直径之和大于等于所述安装孔的宽度。上述结构使得当楔块座转动后,使得位于安装孔内的楔块能更好地沿钢丝绳的长度方向移动(楔块的较大端能抵靠在轨道板弧形段的内壁上转动,因为安装孔与轨道板弧形段内壁之间的距离随着楔块座的转动而逐渐变小,使得楔块在转动的同时实现沿钢丝绳长度方向的移动),并且使得楔块移动后能更好地将钢丝绳卡死在安装孔内(楔块中部的宽度与钢丝绳的直径之和大于等于所述安装孔的宽度),从而能避免桥式起重机因钢丝绳断裂而发生坠物安全事故。
10.在上述的一种用于桥式起重机的断绳防坠装置中,所述安装孔呈矩形,所述楔块的顶面、底面和一侧的侧面均与安装孔的孔壁相抵接,所述楔块另一侧的侧面与钢丝绳相邻设置。上述结构使得楔块在安装孔内的移动能更加平稳,当楔块座转动后,使得位于安装孔内的楔块能更好地沿钢丝绳的长度方向移动,并且使得楔块移动后能更好地将钢丝绳卡死在安装孔内,从而能避免桥式起重机因钢丝绳断裂而发生坠物安全事故。
11.在上述的一种用于桥式起重机的断绳防坠装置中,所述壳体包括相对设置的两块夹板和分别与两块夹板相固连的所述轨道板,所述楔块座的两端分别固设有转盘,两个转盘分别与对应的夹板转动连接,至少一个转盘上设置有用于方便驱动其转动的推杆。上述结构使得电机能通过推杆来驱动转盘的转动,因为楔块座与转盘相固连,所以转盘转动后能带动楔块座同步转动,上述结构使得本用于桥式起重机的断绳防坠装置能利用楔块座的转动带动楔块将钢丝绳卡死,从而能避免钢丝绳与楔块的打滑,从而增强了本用于桥式起重机的断绳防坠装置安全性和稳定性。
12.一种用于桥式起重机的断绳防坠装置的控制方法,其特征在于,包括以下步骤:
13.步骤一、利用嵌设在钢丝绳内的光纤布拉格光栅传感器实时监测钢丝绳在外荷载作用下所产生的应变;
14.步骤二、利用mcu将钢丝绳在外荷载作用下所产生的应变实时换算成钢丝绳的张力值;
15.步骤三、利用mcu将步骤二中得到的张力值输入lstm模型得到下一时刻钢丝绳张力的预测值;
16.步骤四、利用mcu将预测值与预先设定的钢丝绳张力的阈值进行比较,如果预测值超过阈值则由mcu进行报警并触发断绳防坠装置工作。
17.在上述的一种用于桥式起重机的断绳防坠装置的控制方法中,所述步骤二的换算公式如下:
18.δλ=k
′
ε
f/(ea)
19.式中:e,a分别为监测基体(钢丝绳)的弹性模量、横截面积,钢丝绳在外荷载作用下产生应变并传递给光纤布拉格光栅传感器,引起光纤布拉格光栅传感器的初始波长λ0的变化,并得到变化后的λb,λb与λ0之差即为光纤布拉格光栅传感器的波长漂移量δλ;标定时,利用已知的f及δλ,由换算公式可算得k
′
ε
;使用时,根据标定时算得的k
′
ε
及光纤布拉格光栅传感器检测得到的δλ,由换算公式算得张力f。
20.根据光纤布拉格光栅衍射原理,当一束光进人光栅时,只有某种特定波长的光被反射,其余波长的光无损穿过光纤布拉格光栅继续向前传输,被反射的光波波峰处波长λ为
21.λ=2nλ
ꢀꢀꢀ
(1)
22.式中:n为光纤纤芯对自由空间中心波长的折射率;λ为相位掩膜光栅的周期。
23.利用光纤光栅解调仪可测得光纤布拉格光栅传感器的初始波长λ0。当光纤布拉格光栅传感器感知的应变εg发生变化时,弹光效应会造成光栅折射率改变和周期伸缩。此时利用光纤光栅解调仪测得光纤布拉格光栅传感器的中心波长λb。λb与λ0之差即为光纤布拉格光栅的波长漂移量δλ。δλ与εg的关系为
24.δλ={1-n2[p
12-μ(p
11
p
12
)]/2}λbεg=k
ε
εgꢀꢀꢀ
(2)
[0025]
式中:μ为泊松比;p
11
,p
12
为光弹效应系数;k
ε
为光纤布拉格光栅应变灵敏度。
[0026]
光纤布拉格光栅应变εg与监测基体(钢丝绳)应变εm之间由应变传递率β关联,有
[0027]
εg=βεmꢀꢀꢀ
(3)
[0028]
将式(3)代入式(2),得
[0029]
δλ=k
ε
βεm=k
′
ε
εmꢀꢀꢀ
(4)
[0030]
式中:k
′
ε
为光纤布拉格光栅监测应变灵敏度,可通过标定确定。监测基体的应变εm与索力f的关系为
[0031]
εm=f/(ea)
ꢀꢀꢀ
(5)
[0032]
式中:e,a分别为监测基体的弹性模量、横截面积。
[0033]
将式(5)代入式(4),可得δλ和f的关系
[0034]
δλ=k
′
ε
f/(ea)
ꢀꢀꢀ
(6)
[0035]
式中:e,a分别为监测基体(钢丝绳)的弹性模量、横截面积,钢丝绳在外荷载作用下产生应变并传递给光纤布拉格光栅传感器,引起光纤布拉格光栅传感器的初始波长λ0的变化,并得到变化后的λb,λb与λ0之差即为光纤布拉格光栅传感器的波长漂移量δλ;标定时,利用已知的f及δλ,由换算公式可算得k
′
ε
;使用时,根据标定时算得的k
′
ε
及光纤布拉格光栅传感器检测得到的δλ,由换算公式算得张力f。
[0036]
其中,步骤三中的lstm模型是基于注意力机制(attention)的长短时记忆神经网络(lstm)时间序列预测方法计算得到钢丝绳在进行张力的状况下的时间序列预测值(长短期记忆神经网络(long-short term memory,lstm)论文首次发表于1997年)。
[0037]
注意力机制是向量c以目标序列y为条件的,其中目标序列y取决于编码器将输入
序列映射到的注释序列每个注释hi都包含有关整个输入序列的信息,并重点关注输入序列的第i个单词周围的部分。
[0038]
然后,将上下文向量ci计算为这些注释的加权和hi:
[0039][0040]
每个注释hj的权重α
ij
由以下公式计算:
[0041][0042]
注意力机制可以用这些不同的表示分配重要权重,这些表示可以确定最相关的方面,而忽略输入中的噪声和冗余;注意力在神经网络中的结合可显著提高性能,通过促进可解释性,注意力机制可以将传感器检测得到的数据、信号集中锁定,对神经网络内部工作的更深入了解,并通过消除输入的顺序处理降低数据的计算量,提高计算效率;不仅如此,若提供了一个工具来可视化深层神经网络的注意力权重。目的是解释和干扰注意力权重,以便模拟假设情景交互观察并预测的钢丝绳的变化。
[0043]
lstm通过将长期和短期记忆保持在细胞状态来防止数据突然的消失和剧增。此外,还设计了三个特殊门来控制lstm网络中的信息流。它们是遗忘门、输入门和输出门。
[0044]ft
=σ(wfh
t-1
vfx
t
bf)
ꢀꢀꢀ
(3)
[0045]it
=σ(w
iht-1
vix
t
bi)
ꢀꢀꢀ
(4)
[0046]ot
=σ(w
oht-1
vox
t
bo)
ꢀꢀꢀ
(5)
[0047][0048][0049][0050]yt
=σ(w
yht
by)
ꢀꢀꢀ
(9)
[0051]
这里f
t
,i
t
和o
t
分别是遗忘门、输入门和输出门的激活向量。等式(3-5)和(9)是激活函数(通常是sigmoid函数),等式(6)表示双曲正切函数。σ和tanh都将非线性引入lstm网络。向量的每个值范围从0到1,以控制网络内的信息流。当前时间t的细胞状态记为c
t
,它用于存储来自先前输入的记忆。从等式(7),我们可以看到c
t
是根据前一个细胞状态c
t-1
和候选细胞状态更新的。在lstm中,并非所有c
t
的值都会更新,这由遗忘门和输入门决定。更具体地说,在等式(7),f
t
决定c
t-1
的哪个值应该加到c
t
中,i
t
决定哪个值应该加到c
t
中。接下来,o
t
决定c
t
的哪个值应该通过隐藏状态h
t
输出。最后,输出y
t
是基于隐藏状态h
t
计算的,如等式(9)所示。
[0052]
与现有技术相比,本用于桥式起重机的断绳防坠装置及控制方法的优点在于:当钢丝绳的张力预测值超过预先设定的钢丝绳张力的阈值时,mcu控制电机旋转,电机旋转后驱动楔块座转动,因为楔块已经部分位于安装孔内,且楔块沿安装孔移动的方向与楔块座转动的方向成90
°
,因此楔块在壳体轨道板的内壁挤压下可沿位于安装孔内的钢丝绳的长
度方向移动,使得楔块的较大部分能不断进入安装孔,所以位于安装孔内的楔块能挤压相邻侧的钢丝绳,直到位于安装孔内的楔块能迫使钢丝绳折弯并定位于安装孔内,即楔块已将钢丝绳卡死在安装孔内,从而能避免桥式起重机因钢丝绳断裂而发生坠物安全事故,另外,上述结构的断绳防坠装置也能避免钢丝绳与楔块之间的打滑,从而增强了本用于桥式起重机的断绳防坠装置安全性和稳定性。
附图说明
[0053]
图1是本用于桥式起重机的断绳防坠装置的立体结构示意图。
[0054]
图2是本用于桥式起重机的断绳防坠装置去掉一块夹板的结构示意图。
[0055]
图3是本用于桥式起重机的断绳防坠装置侧视的结构示意图。
[0056]
图4是钢丝绳的立体结构示意图。
[0057]
图5是钢丝绳的中心丝嵌设光纤布拉格光栅传感器的剖视图。
[0058]
图6是钢丝绳嵌设光纤布拉格光栅传感器的剖视图。
[0059]
图中,1、壳体;2、楔块座;3、钢丝绳;31、中心丝;32、外层丝;4、安装孔;5、光纤布拉格光栅传感器;6、安装槽;7、环氧树脂;8、轨道板;9、夹板;10、转盘;11、推杆;12、楔块。
具体实施方式
[0060]
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
[0061]
一种用于桥式起重机的断绳防坠装置,参照图1-6,包括壳体1,壳体1内可转动地设置有楔块座2,楔块座2上开设有供钢丝绳3穿设的安装孔4,安装孔4内设置有楔块12且楔块12的较大端与壳体1的内侧壁相抵接,当楔块座2转动时,楔块12能够在壳体1内侧壁的顶推下向较小端插入安装孔4内并将钢丝绳3压紧在安装孔4的孔壁上,本断绳防坠装置还包括控制单元,控制单元包括mcu、用于驱动楔块座2转动且与mcu电连接的电机和用于实时检测钢丝绳3应变且与mcu信号连接的检测组件,检测组件包括嵌设在钢丝绳3内的光纤布拉格光栅传感器5。
[0062]
参照图4、图5和图6,所述钢丝绳3包括中心丝31与若干外层丝32,在钢丝绳3的中心丝31上沿其长度方向开设有安装槽6,所述光纤布拉格光栅传感器5通过环氧树脂7粘贴于安装槽6内。
[0063]
参照图1、图2和图3,所述壳体1包括位于侧部且具有弧形段的轨道板8,所述楔块12的较大端与轨道板8的内壁相抵接,所述楔块12的较大端的端面呈与轨道板8弧形段的内壁相适配的弧形,所述安装孔4与轨道板8弧形段内壁之间的距离随着楔块座2的转动能逐渐变小,所述楔块12中部的宽度与钢丝绳3的直径之和大于等于所述安装孔4的宽度。
[0064]
参照图1、图2和图3,所述安装孔4呈矩形,所述楔块12的顶面、底面和一侧的侧面均与安装孔4的孔壁相抵接,所述楔块12另一侧的侧面与钢丝绳3相邻设置。
[0065]
参照图1、图2和图3,所述壳体1包括相对设置的两块夹板9和分别与两块夹板9相固连的所述轨道板8,所述楔块座2的两端分别固设有转盘10,两个转盘10分别与对应的夹板9转动连接,至少一个转盘10上设置有用于方便驱动其转动的推杆11。
[0066]
一种用于桥式起重机的断绳防坠装置的控制方法,包括以下步骤:
[0067]
步骤一、利用嵌设在钢丝绳3内的光纤布拉格光栅传感器5实时监测钢丝绳3在外荷载作用下所产生的应变;
[0068]
步骤二、利用mcu将钢丝绳3在外荷载作用下所产生的应变实时换算成钢丝绳3的张力值;
[0069]
步骤三、利用mcu将步骤二中得到的张力值输入lstm模型得到下一时刻钢丝绳3张力的预测值;
[0070]
步骤四、利用mcu将预测值与预先设定的钢丝绳3张力的阈值进行比较,如果预测值超过阈值则由mcu进行报警并触发断绳防坠装置工作。
[0071]
所述步骤二的换算公式如下:
[0072]
δλ=k
′
ε
f/(ea)
[0073]
式中:e,a分别为监测基体(钢丝绳3)的弹性模量、横截面积,钢丝绳3在外荷载作用下产生应变并传递给光纤布拉格光栅传感器5,引起光纤布拉格光栅传感器5的初始波长λ0的变化,并得到变化后的λb,λb与λ0之差即为光纤布拉格光栅传感器5的波长漂移量δλ;标定时,利用已知的f及δλ,由换算公式可算得k
′
ε
;使用时,根据标定时算得的k
′
ε
及光纤布拉格光栅传感器5检测得到的δλ,由换算公式算得张力f。
[0074]
工作原理:该用于桥式起重机的断绳防坠装置设置在桥式起重机的出入绳口,首先嵌设在钢丝绳3内的光纤布拉格光栅传感器5可以实时监测钢丝绳3的应变,并将钢丝绳3的应变数据实时传输给mcu,mcu通过数据处理能得到钢丝绳3下一时刻张力的预测值,并将该预测值与预先设定的钢丝绳3张力的阈值进行比较,如果该预测值超过阈值则由mcu进行报警并控制电机旋转,电机旋转后驱动楔块座12转动,当楔块座12转动后,因为楔块12已经部分位于安装孔4内,且楔块12沿安装孔4移动的方向与楔块座2转动的方向成90
°
,因此楔块12在壳体1内侧壁的顶推下向较小端插入安装孔4内(楔块12的较大端能抵靠在壳体1轨道板8弧形段的内壁上转动,因为安装孔4与轨道板8弧形段内壁之间的距离随着楔块座2往靠近轨道板8的方向转动而逐渐变小,使得楔块12在转动的同时实现向较小端插入安装孔4内),又因为楔块12的较大端与壳体1的内侧壁相抵接,所以楔块12的较大部分能不断进入安装孔4,所以位于安装孔4内的楔块12能挤压相邻侧的钢丝绳3,直到位于安装孔4内的楔块12能将钢丝绳3压紧在安装孔4的孔壁上(即楔块12已将钢丝绳3卡死在安装孔4内),从而能避免桥式起重机因钢丝绳3断裂而发生坠物安全事故,另外,上述结构的断绳防坠装置能利用楔块座2的转动带动楔块12将钢丝绳3卡死,从而能避免钢丝绳3与楔块12之间的打滑,从而增强了本用于桥式起重机的断绳防坠装置安全性和稳定性。
[0075]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。