1.本发明涉及无人机导航技术领域,特别是涉及一种基于无人机指定航向穿越视觉目标点的导引方法及系统。
背景技术:
2.近年来,随着传感器技术、微机电技术、无线通信技术以及航空技术的飞速发展,无人机技术日趋成熟。目前,无人机可以通过搭载不同的设备完成许多特殊的任务,具有非常广泛的军用前景和民用前景。无人机能否安全顺利的完成任务,很大程度上取决于无人机的导航控制能力,虽然目前针对无人机导航控制的研究已较为成熟,但在实际应用中还存在许多问题亟需攻克。
3.目前基于视觉任务的无人机应用越来越多,有时候需要无人机基于视觉目标点来规划航迹,比如以指定航向飞跃视觉目标点,但是没有相关的解决方案。
技术实现要素:
4.本发明的目的是提供一种基于无人机指定航向穿越视觉目标点的导引方法及系统,以达到无人机以指定航向穿越视觉目标点的目的。
5.为实现上述目的,本发明提供了如下方案:
6.一种基于无人机指定航向穿越视觉目标点的导引方法,包括:
7.获取无人机的飞行参数;所述飞行参数包括飞行速度、飞行航向和指定航向;
8.获取所述无人机的位置信息和视觉目标点的位置信息;
9.基于所述飞行航向、所述无人机的位置信息和所述视觉目标点的位置信息,计算视线角;
10.基于所述飞行参数和所述视线角,确定无人机的航向角速度;所述航向角速度用于将无人机以指定航向穿越视觉目标点。
11.可选的,所述基于所述无人机的位置信息和所述视觉目标点的位置信息,计算视线角信息,具体包括:
12.基于所述无人机的位置信息和所述视觉目标点的位置信息,确定第一连线;所述第一连线为所述无人机到与所述视觉目标点之间的连线;
13.确定视线角;所述视线角为所述飞行航向与所述第一连线的夹角。
14.可选的,所述指定航向的确定过程:
15.确定无人机飞行航迹要求;
16.确定所述无人机的指定航向;所述指定航向为所述无人机飞行航迹要求的穿越所述视觉目标点的指向。
17.可选的,所述基于所述飞行参数和所述视线角,确定无人机的航向角速度,具体包括:
18.根据公式确定无人机的航向角速度;
19.其中,v为无人机的飞行速度,ψ为无人机的飞行航向,ψ0为穿越视觉目标点所需的指定航向;α为视线角,d为一个常量,ω为无人机的航向角速度。
20.一种基于无人机指定航向穿越视觉目标点的导引系统,包括:
21.飞行参数获取模块,用于获取无人机的飞行参数;所述飞行参数包括飞行速度、飞行航向和指定航向;
22.位置信息获取模块,用于获取所述无人机的位置信息和视觉目标点的位置信息;
23.视线角计算模块,用于基于所述飞行航向、所述无人机的位置信息和所述视觉目标点的位置信息,计算视线角;
24.航向角速度计算模块,用于基于所述飞行参数和所述视线角,确定无人机的航向角速度;所述航向角速度用于将无人机以指定航向穿越视觉目标点。
25.可选的,所述视线角计算模块,具体包括:
26.第一连线确定单元,用于基于所述无人机的位置信息和所述视觉目标点的位置信息,确定第一连线;所述第一连线为所述无人机到与所述视觉目标点之间的连线;
27.视线角确定单元,用于确定视线角;所述视线角为所述飞行航向与所述第一连线的夹角。
28.可选的,在所述飞行参数获取模块中,所述指定航向的确定过程:
29.确定无人机飞行航迹要求;
30.确定所述无人机的指定航向;所述指定航向为所述无人机飞行航迹要求的穿越所述视觉目标点的指向。
31.可选的,所述航向角速度计算模块,具体包括:
32.航向角速度计算单元,用于根据公式确定无人机的航向角速度;
33.其中,v为无人机的飞行速度,ψ为无人机的飞行航向,ψ0为穿越视觉目标点所需的指定航向;α为视线角,d为一个常量,ω为无人机的航向角速度。
34.根据本发明提供的具体实施例,本发明公开了以下技术效果:
35.本发明首先根据飞行航向、无人机的位置信息和视觉目标点的位置信息,计算无人机与视觉目标点的视线角信息,然后通过视线角信息即可确定航向角速度,进而实现无人机航迹控制,以达到无人机以指定航向穿越视觉目标点的目的。
附图说明
36.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
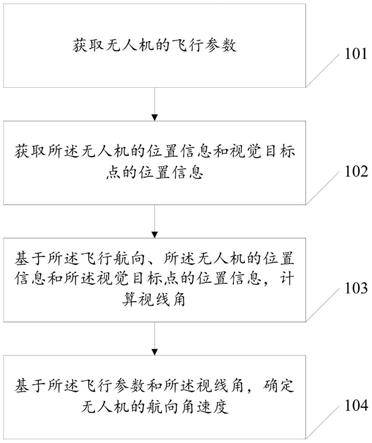
37.图1为本发明基于无人机指定航向穿越视觉目标点的导引方法的流程示意图;
38.图2为本发明无人机飞行航迹控制原理示意图;
39.图3为本发明基于无人机指定航向穿越视觉目标点的导引方法的仿真结果图;
40.图4为本发明基于无人机指定航向穿越视觉目标点的导引系统的结构示意图。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.本发明的目的是提供一种基于无人机指定航向穿越视觉目标点的导引方法及系统,本发明基于无人机与视觉目标点之间的视线角信息来确定无人机的航迹;该航迹为无人机以指定航向穿越视觉目标点的航行轨迹。
43.本发明包含无人机航向角速度的计算方法:根据无人机飞行速度、无人机飞行航向、以及无人机到视觉目标点之间的视线角信息,计算无人机转弯航向角速度。航向角速度的计算公式为:
44.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
45.实施例一
46.参见图1,本实施例提供了一种基于无人机指定航向穿越视觉目标点的导引方法,可以解决无人机以指定航向飞越视觉目标点的问题,包括:
47.步骤101:获取无人机的飞行参数;所述飞行参数包括飞行速度、飞行航向和指定航向。
48.一个示例为:无人机的飞行速度为v,飞行航向以北向为基准,顺时针0~360
°
,记为ψ;指定航向,即无人机飞行航迹要求的穿越视觉目标点的指向,记为ψ0。
49.步骤102:获取所述无人机的位置信息和视觉目标点的位置信息。
50.一个示例为:由无人机搭载的机载传感器实时获取无人机当前位置a和视觉目标点的当前位置b。
51.步骤103:基于所述飞行航向、所述无人机的位置信息和所述视觉目标点的位置信息,计算视线角。
52.步骤104:基于所述飞行参数和所述视线角,确定无人机的航向角速度;所述航向角速度用于将无人机以指定航向穿越视觉目标点;所述航向角速度为无人机调整航向所需的转弯航向角速度。
53.作为一种优选的实施方式,本实施例所述的步骤103具体包括:
54.基于所述无人机的位置信息和所述视觉目标点的位置信息,确定第一连线;所述第一连线为所述无人机到与所述视觉目标点之间的连线。
55.确定视线角;所述视线角为所述飞行航向与所述第一连线的夹角。
56.作为一种优选的实施方式,本实施例所述的步骤101中的所述指定航向的确定过程:
57.确定无人机飞行航迹要求。
58.确定所述无人机的指定航向;所述指定航向为所述无人机飞行航迹要求的穿越所述视觉目标点的指向。
59.无人机飞行航迹控制原理如图2所示。图2中,v为无人机的飞行速度,ψ为无人机的飞行航向;b为无人机穿越的视觉目标点,ψ0为穿越视觉目标点所需的指定航向;α为无人机的飞行航向与第一连线(所述第一连线为无人机到视觉目标点之间的连线)的夹角,记为视线角;β为第一连线与指定航向之间的夹角。利用本实施例提供的技术方案可以使无人机的飞行航迹大致如图3中的飞行航迹所示,以固定航向穿越视觉目标点。
60.根据图中几何关系可知,视线角α与夹角β之间存在如下关系:
61.α ψ=β ψ0;
62.要使无人机按照要求航迹穿越视觉目标点,需要在无人机飞行过程中不断的改变航向角速度来调整飞行航向,本实施例给出的无人机航向角速度的计算公式为:
[0063][0064]
式中,d为一个常量,根据无人机自身性能进行选取,应考虑无人机飞行速度大小并且一般应大于无人机倾斜转弯的最小转弯半径。
[0065]
根据视线角α与夹角β的关系,可得β=α ψ-ψ0,将其代入航向角速度计算公式即可得到航向角速度的最终表达式为:
[0066][0067]
故可以根据公式确定无人机的航向角速度;其中,v为无人机的飞行速度,ψ为无人机的飞行航向,ψ0为穿越视觉目标点所需的指定航向;α为视线角,d为一个常量,ω为无人机的航向角速度。
[0068]
为验证本实施例提出的技术方案,进行如下的仿真试验。
[0069]
设置仿真参数如下:无人机飞行速度v=15m/s,取常数d=30,无人机初始位置a的坐标为(0,100),目标点b的坐标为(300,300),初始航向角ψ=150
°
,固定航向或者指定航向ψ0=90
°
,即为x轴正方向,仿真结果如图3所示。
[0070]
从图3所示结果可以看出,无人机利用本实施例提供的技术方案可以在飞行过程中不断调整航向,使飞行航向与指定航向相一致,最终实现按照要求航迹飞越视觉目标点的目的。因此,该仿真实验验证了本实施例提供的技术方案的有效性。
[0071]
实施例二
[0072]
本实施例提供了一种基于无人机指定航向穿越视觉目标点的导引系统,如图4所示,包括:
[0073]
飞行参数获取模块401,用于获取无人机的飞行参数;所述飞行参数包括飞行速度、飞行航向和指定航向。
[0074]
位置信息获取模块402,用于获取所述无人机的位置信息和视觉目标点的位置信息。
[0075]
视线角计算模块403,用于基于所述飞行航向、所述无人机的位置信息和所述视觉目标点的位置信息,计算视线角。
[0076]
航向角速度计算模块404,用于基于所述飞行参数和所述视线角,确定无人机的航向角速度;所述航向角速度用于将无人机以指定航向穿越视觉目标点。
[0077]
所述视线角计算模块403,具体包括:
[0078]
第一连线确定单元,用于基于所述无人机的位置信息和所述视觉目标点的位置信息,确定第一连线;所述第一连线为所述无人机到与所述视觉目标点之间的连线。
[0079]
视线角确定单元,用于确定视线角;所述视线角为所述飞行航向与所述第一连线的夹角。
[0080]
在所述飞行参数获取模块401中,所述指定航向的确定过程:
[0081]
确定无人机飞行航迹要求;确定所述无人机的指定航向;所述指定航向为所述无人机飞行航迹要求的穿越所述视觉目标点的指向。
[0082]
所述航向角速度计算模块404,具体包括:
[0083]
航向角速度计算单元,用于根据公式确定无人机的航向角速度。
[0084]
其中,v为无人机的飞行速度,ψ为无人机的飞行航向,ψ0为穿越视觉目标点所需的指定航向;α为视线角,d为一个常量,ω为无人机的航向角速度。
[0085]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0086]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
