1.本发明涉及船舶远程控制技术领域,特别涉及一种船岸协同内河船舶远程控制方法及系统。
背景技术:
2.我国交通强国建设纲要指出,发展具有自主知识产权的智能船舶,促进中长途运输向水路运输有序转移。因此,以远程控制为代表的智能船舶关键技术受到了空前的关注。本发明所提船岸协同下的内河船舶远程控制技术是一类船舶远程控制技术,其技术主要难点是:船岸通信条件,延迟和带宽是限制远程控制技术的一大障碍,通信的不稳定会导致驾控人员不能及时获取船舶周围的环境信息,以做出正确的决策;船舶的传感器技术,目前的精准度还不足以支撑完全的自主航行,要通过多源数据融合得到有效的信息支持船舶的态势感知;机械控制部件的可靠性,航行中存在许多不确定性,机械的故障会导致致命的事故;远程控制中人机交互方式,如何设计远程控制中心,呈现需要的画面,给驾控人员能够获得身临其境的感觉。
3.基于现有船岸通信条件,可利用lte-v、vast、铱星和北斗等组成通信链路,构造具备态势感知、远程控制和半自主航行的远程驾驶系统。系统通过船舶周围态势感知,将感知信息和船舶状态信息反馈到远程控制中心,远程控制中心通过数据融合呈现给驾控人员。驾控人员根据收到的信息做出决策,并通过远程控制船舶完成操纵。
技术实现要素:
4.有鉴于此,本发明提供一种船岸协同内河船舶远程控制方法及系统。
5.一种船岸协同内河船舶远程控制系统,其包括船载域、岸基域和云端域;船载域分别与岸基域、云端域远程通信连接;岸基域与云端域之间通信连接;
6.船载域,包括船载感知系统、船载数字孪生系统、船载决策支持系统、船载控制系统和船载通讯系统;
7.岸基域,包括岸基感知系统、岸基监测系统和岸基通讯系统;
8.云端域,包括远程控制中心、rcc数字孪生系统、rcc辅助驾驶系统、云端数据资源管理中心、云端通讯系统。
9.在本发明所述的船岸协同内河船舶远程控制系统中,
10.船载感知系统,用于对自然条件、航道条件、交通条件信息进行采集和加工;
11.船载数字孪生系统,用于根据船载感知系统反馈的信息更新船载数字孪生体,判断当前的船舶航行状态;
12.船载决策支持系统,用于实现给定航行航速的跟踪、给定轨迹的跟踪、给定车舵指令的跟踪;以及根据地图路径点标点和轨迹指令,生成船舶驾驶所需的决策信息;
13.船载控制系统,用于根据决策信息解算出各类驾控指令,并进行多源数据融合,选取最优指令,并在执行最优指令后反馈航行状态信息,最终完成船舶的远程控制;
14.船载通讯系统,用于实现与岸基域、云端域的通信加密和保护。
15.在本发明所述的船岸协同内河船舶远程控制系统中,
16.岸基感知系统用于采集环境信息,
17.岸基监测系统,用于显示船舶当前航行状态,包括船员驾驶、远程驾驶、自主航行信息,并显示自主航行条件、通讯条件的状态信息;
18.岸基通讯系统,用于实现与船载域、云端域的通信加密和保护。
19.在本发明所述的船岸协同内河船舶远程控制系统中,
20.远程控制中心,用于实时监控船舶的各项状态及船舶周围环境情况,航行中进行航速优化,接收船岸多源数据融合的信息,并用于判断是否有必要进行控制权交接,由受控船值守人员控制船舶,还用于规划出合适航线,通过岸基通讯系统发送指令到船载决策支持系统;
21.rcc辅助驾驶系统,用于通过船岸多源数据融合的信息,实现船舶轨迹偏离预警、船船碰撞预警、船桥碰撞预警、船岸碰撞预警和障碍物预警;支持岸基视频图像信息的访问,增强态势感知能力;支持驾控人员的试操船功能,预测显示船舶试操船的结果,提供决策支持;支持航行场景再现及多视角切换功能;支持检测指令的安全性和安全自检;实现船岸通讯条件的监测,支持船岸控制权切换预警;
22.云端数据资源管理中心,用于对船载域、岸基域采集的信息进行实时备份,对采集的信息进行校验、分类,进行全局资源的优化管理和rcc辅助驾驶系统计算任务调配;
23.rcc数字孪生系统,用于建立船舶运动模型、运动参数与船舶周围环境可视化模型,并在通讯正常的情况下,融合船载感知信息和岸基感知信息,当通讯异常时,则输出岸基感知信息;还用于更新船舶运动模型、参数与船舶周围环境可视化模型;更新航行数据、环境数据、运动模型、运动参数与可视化场景,支持对船舶运动进行仿真,得到孪生船舶的推算船位及推算误差;
24.云端通讯系统,用于实现与船载域、岸基域的通信加密和保护。
25.在本发明所述的船岸协同内河船舶远程控制系统中,
26.船载感知系统包括船载雷达、船载摄像头、北斗/gps与船载信息融合模块;
27.船载雷达,用于采集本船周围船舶位置、方位、运动状态信息和障碍物信息;
28.船载摄像头,采集本船周围环境的视频图像信息;
29.北斗/gps,采集本船经纬度信息、船舶航向和运动信息;
30.船载信息融合模块,将船载多源传感器产生的异构数据进行融合,得到船舶系统状态、船舶运动状态、船舶周围环境状态信息。
31.在本发明所述的船岸协同内河船舶远程控制系统中,
32.船载数字孪生系统,包括船载数字孪生体、船岸信息融合模块与孪生体更新模块;
33.船载数字孪生体,包括船舶运动模型,运动参数与可视化模型;
34.船岸信息融合模块,用于当通讯正常时融合船载感知信息与岸基感知信息,当通讯异常时,则输出船载感知信息;
35.孪生体更新模块,用于根据船岸信息模块提供的信息,更新船舶运动模型、参数与可视化模型;更新航行数据、环境数据、运动模型、运动参数与可视化场景,支持对船舶运动进行仿真,得到孪生船舶的推算船位及推算误差。
36.在本发明所述的船岸协同内河船舶远程控制系统中,
37.船载控制系统包括指令融合模块、运动控制模块和运动监控模块;
38.指令融合模块,用于根据态势感知信息,给出多类驾控指令,进行融合,求解出最优车舵指令,驾控指令包括对船舶航速、航向和运动轨迹的控制;
39.运动控制模块,用于根据控制指令的要求,驱动车舵执行器实现船舶期望的运动;
40.运动监控模块,用于利用船载设备状态传感器,采集船舶运动状态、舵角信息、螺旋桨转速,实时对船舶车舵状态、船舶运动状态和船舶航行安全状态进行监测。
41.在本发明所述的船岸协同内河船舶远程控制系统中,
42.岸基感知系统,包括岸基雷达、岸基摄像头、岸基其他环境传感器;
43.岸基雷达,用于采集覆盖范围内动静态障碍物位置、方位与运动信息和障碍物信息;
44.岸基摄像头,用于采集覆盖范围环境的视频图像信息;
45.岸基其他环境传感器,拥有利用岸基的各类传感器实现对环境的感知。
46.在本发明所述的船岸协同内河船舶远程控制系统中,
47.rcc数字孪生系统,包括rcc数字孪生体、船岸信息融合模块与孪生体更新模块;
48.rcc数字孪生体,包括船舶运动模型、运动参数与船舶周围环境可视化模型;
49.船岸信息融合模块,用于当通讯正常时融合船载感知信息与岸基感知信息,当通讯异常时,则输出岸基感知信息;
50.孪生体更新模块,用于根据船岸信息模块提供的信息,更新船舶运动模型、参数与船舶周围环境可视化模型;更新航行数据、环境数据、运动模型、运动参数与可视化场景,支持对船舶运动进行仿真,得到孪生船舶的推算船位及推算误差。
51.在本发明所述的船岸协同内河船舶远程控制系统中,
52.船载通讯系统,用于通过lte-v/铱星/vast链接远程控制中心,受控船值守船员通过lte-v/vhf与远程驾控人员进行通讯,还用于支持通信加密和保护,监测实时的通信条件,预测通信质量,提供船岸通信中断警报,通过配备备用卫星通信设备实现及时切换通讯链路;
53.岸基通讯系统,用于通过lte-v/铱星/vast链接受控船与远程控制中心,远程驾控人员通过lte-v/vhf与受控船值守船员进行通讯,岸基域和云端域采用光纤链接
54.云端通讯系统,用于通过lte-v/铱星/vast链接云端域和船载域,云端域采用光纤链接岸基域。
55.本发明还提供一种船岸协同内河船舶远程控制方法,其通过上述任一项所述的船岸协同内河船舶远程控制系统实现,包括如下步骤:
56.s1、在开航前,rcc远程rcc辅助驾驶系统对影响船舶航行安全设备进行自检。当监测到设备异常时,向受控船值守船员和远程控制中心发出提示报警信息及故障信息,若故障得到排除,则警报解除,远程控制中心发出指令控制船舶,否则,远程控制中心不被授予控制权限;
57.s2、船载感知系统获取船舶周围的安全态势信息,通过船载通讯系统将信息发送给受控船值守船员和远程控制中心;船载数字孪生系统根据船载感知系统反馈的信息更新船载数字孪生体,判断当前的航行状态,若偏移预定轨迹带,则发出危险预警,提醒远程驾
控人员和受控船值守人员做好控制权交接准备;若通信时延超过预设时长,导致船载感知的视频图像不能在预设时间内反馈船舶周围船舶、环境信息,利用岸基感知系统进行场景再现和多视角图像切换;远程控制中心判断是否有必要进行控制权交接,由受控船值守人员控制船舶;
58.s3、岸基监测系统时刻监控着船舶的航行状态,云端数据资源管理中心对各类数据进行存储、分类;交通系统模型根据融合的感知信息,不断更新船舶模型和参数,模拟船舶的运动,对受控船进行危险监测和预警,以及对交通事故进行预测和预警;
59.s4、环境信息、船舶信息等再反馈到远程控制中心,远程控制中心规划出合适航线,通过岸基通讯系统发送指令到船载决策支持系统;船载决策支持系统判断指令安全性,船载控制系统中的控制器根据决策信息解算出各类驾控指令,并进行多源数据融合,选取最优指令;船载控制系统中的执行器执行命令并反馈航行状态信息,最终完成船舶的远程控制。
60.有益技术效果:本发明的船岸协同内河船舶远程控制方法与系统相对于现有技术具有如下优点:
61.1)使用数字孪生技术,建立船舶数字孪生体,通过实时数据不断更新模型参数,帮助船载船员或rcc远程驾控人员直观的获取船舶未来运动信息(如轨迹),并具备预判断危险、提供预警服务的功能;
62.2)辅助驾驶系统,可以提供各类场景危险预警功能,并利用力反馈操纵杆反馈船舶各指令的执行情况,通过触觉反馈帮助船载船员/rcc远程驾控人员感知船舶运动情况,为安全驾驶提供保障;
63.3)多驾控指令融合便于决策系统生成多种指令(轨迹、航向、航速等),求解出最优的车舵控制指令;
64.4)利用船岸协同感知,对船舶周围环境进行多视角切换和情景再现,在天气情况恶劣、复杂水域航行时提供远程驾驶辅助与受控船舶航行辅助;
65.5)船载感知失效或通讯带宽受限导致船载感知信息不完整时,可以通过岸基感知信息的补充,在rcc端实现对受控船舶运动状态的监测,还原受控船舶的状态,并支持远程控制。
66.6)船载决策系统,能够主动分辨远程指令的有效性与安全性,并及时预警、交接船舶控制权。
67.7)远程控制系统为受控船船员提供了便利。多源感知信息便于船员了解船舶周围环境,而决策系统能够帮助船员判断指令的安全性,减轻船员驾驶负担。
附图说明
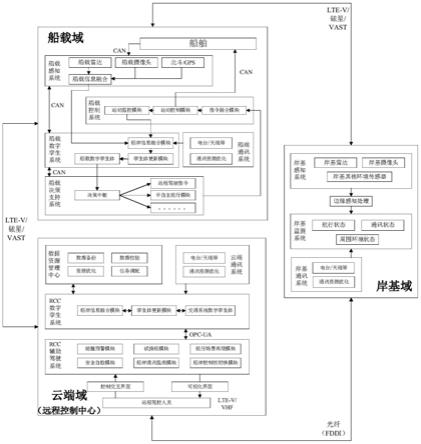
68.图1是本发明实施例提供的船岸协同内河船舶远程控制系统的结构示意框图;
69.图2是本发明实施例提供的船岸协同内河船舶远程控制方法流程图。
具体实施方式
70.图1所示,本发明实施例提供的船岸协同内河船舶远程控制系统包括船载域、岸基域和云端域(远程控制中心)。船载域通过lte-v/铱星/vast链接云端域(远程控制中心),船
载域通过lte-v/铱星/vast链接岸基域,云端域(远程控制中心)通过光纤链接岸基域。船载域各子系统通过can总线进行链接,rcc数字孪生系统通过opc-ua链接辅助驾驶系统,远程驾控人员通过lte-v/vhf与系统进行人机交互。
71.船载感知系统,可对自然条件、航道条件、交通条件等信息进行采集和加工,包括船载雷达、船载摄像头、北斗/gps与船载信息融合模块。船载雷达,采集本船周围船舶位置、方位、运动状态等信息和障碍物信息;船载摄像头,采集本船周围环境的视频图像信息;北斗/gps,采集本船经纬度信息、船舶航向和运动信息;船载信息融合模块,将船载多源传感器产生的异构数据进行融合,得到船舶系统状态、船舶运动状态、船舶周围环境状态等信息,引入卡尔曼滤波,对船舶给出船舶当前位置的最优估计。
72.船载数字孪生系统,包括船载数字孪生体、船岸信息融合模块与孪生体更新模块。船载数字孪生体,包括船舶运动模型,运动参数与可视化模型;船岸信息融合模块,当通讯正常时融合船载感知信息与岸基感知信息,当通讯异常时,则输出船载感知信息;孪生体更新模块,根据船岸信息模块提供的信息,更新船舶运动模型、参数与可视化模型;更新航行数据、环境数据、运动模型、运动参数与可视化场景,支持对船舶运动进行仿真,得到孪生船舶的推算船位及推算误差。
73.船载决策支持系统,支持各类远程驾驶指令,即能够实现给定航行航速的跟踪、给定轨迹的跟踪、给定车舵指令的跟踪等;以及具备半自主航行模块,即能够根据地图路径点标点和轨迹指令,生成所需的控制指令。
74.船载控制系统包括指令融合模块、运动控制模块和运动监控模块,指令融合模块,船载系统根据船舶跟踪的轨迹、期望的航速和航向、直接的车舵指令,进行逆运动学求解,求解出最优的车舵控制指令;运动控制模块,设计相应的运动控制器,根据控制指令的要求,驱动车舵执行器实现船舶期望的运动;运动监控模块,利用船载设备状态传感器,采集船舶运动状态、舵角信息、螺旋桨转速等,实时对船舶车舵状态、船舶运动状态和船舶航行安全状态进行监测。
75.船载通讯系统,通过lte-v/铱星/vast链接远程控制中心,受控船值守船员通过lte-v/vhf与远程驾控人员进行通讯。船载通讯系统支持通信加密和保护,监测实时的通信条件,预测通信质量,提供船岸通信中断警报,配备备用卫星通信设备,以便及时切换通讯链路,对通讯资源进行优化及具备重要信息传输的快速可靠通道。
76.岸基感知系统,包括岸基雷达、岸基摄像头、岸基其他环境传感器(风速风向仪器、流速流向仪、能见度测量仪等)。岸基雷达,采集覆盖范围内动静态障碍物位置、方位与运动信息和障碍物信息;岸基摄像头,采集覆盖范围环境的视频图像信息;岸基其他环境传感器,利用岸基的各类传感器实现对环境的感知,包括风、流与能见度等。
77.岸基监测系统,显示船舶当前航行状态,如船员驾驶、远程驾驶、自主航行等,并显示自主航行条件、通讯条件的状态等。
78.岸基通讯系统,通过lte-v/铱星/vast链接受控船与远程控制中心,远程驾控人员通过lte-v/vhf与受控船值守船员进行通讯,岸基域和云端域采用光纤链接。岸基通讯系统同样具备船载通讯系统的通信加密和保护等功能。
79.rcc数字孪生系统,包括rcc数字孪生体、船岸信息融合模块与孪生体更新模块;rcc数字孪生体,包括船舶运动模型、运动参数与船舶周围环境可视化模型;船岸信息融合
模块,当通讯正常时融合船载感知信息与岸基感知信息,当通讯异常时,则输出岸基感知信息;孪生体更新模块,根据船岸信息模块提供的信息,更新船舶运动模型、参数与船舶周围环境可视化模型;更新航行数据、环境数据、运动模型、运动参数与可视化场景,支持对船舶运动进行仿真,得到孪生船舶的推算船位及推算误差。
80.rcc辅助驾驶系统,通过船岸多源数据融合的信息,更新船舶数字孪生体运动模型;再根据所接收的远程驾驶输入信号,更新船舶数字孪生体输入参数;通过模拟仿真,得到数字孪生船舶未来的位置与姿态,即为预测轨迹,实现船舶轨迹偏离预警、船船碰撞预警、船桥碰撞预警、船岸碰撞预警和障碍物预警。
81.rcc辅助驾驶系统支持岸基视频图像信息的快速访问,及当本船与他船在复杂航道会遇,本船视线、感知范围受限,主动向船舶推送遮挡区域交通信息。船舶也可以向岸基请求感知增强信息。信息包括交通信息、航道条件信息、气象信息等。
82.rcc辅助驾驶系统支持驾控人员的试操船功能,船员可以与数字孪生船进行交互,预测显示船舶试操船的结果,提供适当的决策支持,以得到最佳的避险操作。
83.rcc辅助驾驶系统支持航行场景再现及多视角切换功能,在通信信号正常时,远程控制中心能够获取当前船舶的驾驶台视角,船载设备能实时传输航行场景,且远程控制中心能自由切换舱内视角、全景视角、岸基视角;当船岸通信存在较短延时,远程控制中心可对场景进行短时预测;当船岸通信存在长延时,通信异常,无法满足相关视频数据的传输,远程控制中心可调用岸基视角获取当前场景进行辅助决策,并结合船载设备传输的关键文本信息对船舶进行操控。
84.rcc辅助驾驶系统支持检测指令的安全性和安全自检功能。rcc辅助驾驶系统实现船岸通讯条件的监测,当通讯质量不佳时,自动调整到备用信道,优化通讯质量;rcc辅助驾驶系统自动对传输数据质量进行校验,当传输数据持续受损时,则向船、岸系统发送警示信息。
85.rcc辅助驾驶系统支持船岸控制权切换预警,系统检测到系统整体延时量达到长延时范围,可能会影响船舶操纵指令的响应,远程控制受限,通信随时会中断,船舶整体处于不稳定的状态。此时,远程控制中心与船舶进行控制权的交接,在控制权交接过程中,船舶进行短时的自主航行,直到控制权交接完毕,退出自主航行程序,由船上人员接管控制船舶。
86.云端数据资源管理中心,对船岸采集的信息进行实时备份,支持对数据进行简单的校验、分类,进行全局资源(计算资源、网络资源、存储资源等)的优化管理和远程驾驶系统计算任务调配。
87.云端通讯系统,通过lte-v/铱星/vast链接云端域和船载域,云端域采用光纤链接岸基域。云端通讯系统同样具备船载通讯系统的通信加密和保护等功能。
88.如图2所示,一种船岸协同内河船舶远程控制方法,包括如下步骤:
89.s1、在开航前,rcc辅助驾驶系统对影响船舶航行安全设备进行自检。当监测到设备异常时,及时向受控船值守船员和远程控制中心发出提示报警信息及故障信息。若故障得到排除,则警报解除,远程控制中心可发出指令控制船舶。否则,远程控制中心不被授予控制权限;
90.s2、船载感知系统获取船舶周围的安全态势信息,通过船载通讯系统将信息发送
给受控船值守船员和远程控制中心。船载数字孪生系统根据船载感知系统反馈的信息更新船载数字孪生体,判断当前的航行状态,若偏移预定轨迹带,则发出危险预警,提醒远程驾控人员和受控船值守人员做好控制权交接准备。若通信时延过大,导致船载感知的视频图像不能及时反馈船舶周围船舶、环境信息,利用岸基感知系统进行场景再现和多视角图像切换。远程控制中心判断是否有必要进行控制权交接,由受控船值守人员控制船舶;
91.s3、岸基监测系统时刻监控着船舶的航行状态,云端数据资源管理中心对各类数据进行存储、分类。交通系统模型根据融合的感知信息,不断更新船舶模型和参数,模拟船舶的运动,对受控船进行危险监测和预警,以及对交通事故进行预测和预警;
92.s4、环境信息、船舶信息等再反馈到远程控制中心,远程控制中心规划出合适航线,通过岸基通讯系统发送指令到船载决策支持系统。船载决策支持系统判断指令安全性,船载控制系统中的控制器根据决策信息解算出各类驾控指令,并进行多源数据融合,选取最优指令。船载控制系统中的执行器执行命令并反馈航行状态信息,最终完成船舶的远程控制。
93.以上,包括本发明实施例的方法及系统不局限于具体实现实施方式,对于本领域的普通技术人员来说,可以根据本发明的技术构思做出其它各种相应的改变与变形,而所有这些改变与变形都应属于本发明权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
