1.本发明属于导航技术领域,具体涉及一种导航电文半周跳变检测方法。
背景技术:
2.随着经济技术的发展和人们生活水平的提高,导航技术已经广泛应用于人们的生产和生活当中,给人们的生产和生活带来了无尽的便利。因此,保障导航的稳定可靠精确运行,就成为了导航系统最重要的任务之一。
3.接收机是导航系统的重要组成部分。目前在接收机的数据预处理过程中,针对半周模糊度并没有专门的探测方法。目前常用电离层残差法来对小周跳进行探测;该方法是基于电离层变化缓慢的基础之上,考察不同历元之间电离层残差的变化。但是,电离层残差法主要有以下3种缺陷:a、如果信号失锁时间过长或者电离层变化较大,该方法对于半周跳的探测结果并不可靠,而且甚至会出错;b、该方法只能用于双频观测量,而对单频观测量的接收机并不适用,而且即使探测出半周跳也不能确定具体是哪个频点观测量发生了半周跳;c、该半周跳探测方法都只能探测整周跳发生时刻,而对于半周跳连续多个历元发生的情况,该半周跳探测算法并不适用。
4.目前,也有第二种半周跳探测方法-同步头方法,即以每帧电文的同步头的翻转状态作为半周跳检测的方法。该方法依据同步头不随时间变化的特点,通过大数判决方法来对半周跳进行检测。但是,以gps的l1ca为例,由于一帧电文的时长是6秒,所以该方法最快也需要6秒才能给出半周跳的探测结果,耗时较长;而且由于同步头只有8比特,该方法在复杂情况下的可靠性较低,而且容易发生误判。
技术实现要素:
5.本发明的目的在于提供一种检测速度快、检测可靠性高且适用范围广的导航电文半周跳变检测方法。
6.本发明提供的这种导航电文半周跳变检测方法,包括如下步骤:s1. 获取一帧完整的导航电文,并进行校验;校验通过后将该帧电文保存为比对模板;s2. 接收待检测的导航电文;s3. 根据接收到的导航电文中帧内比特计数,确定当前接收到的数据一帧导航电文中的位置;s4. 将待检测的导航电文的载噪比与设定的载噪比阈值进行比对:若待检测的导航电文的载噪比大于设定的载噪比阈值,则进行后续步骤;若待检测的导航电文的载噪比小于或等于设定的载噪比阈值,则跳转到步骤s8;s5. 根据步骤s3得到的当前接收到的数据一帧导航电文中的位置,确认得到有效对比比特;s6. 将步骤s5得到的有效对比比特,与步骤s1保存的比对模板进行逐比特对比,
并统计各比特翻转的状态;s7. 根据步骤s6统计得到的各比特翻转的状态,对半周跳变进行检测;s8. 对比对模板进行更新;s9. 重复步骤s2~s8,持续进行导航电文半周跳变的检测。
7.步骤s5所述的根据步骤s3得到的当前接收到的数据一帧导航电文中的位置,确认得到有效对比比特,具体包括如下步骤:a. 根据步骤s3得到的当前接收到的数据一帧导航电文中的位置,将导航电文划分为时变比特和固定比特;b. 针对时变比特,根据周内秒和帧计数的递推关系进行时变信息推算,从而得到时变信息的比特,增加可用比对比特;c. 针对固定比特,直接将固定比特作为固定比对比特;d. 将步骤b得到的时变比对比特和步骤c得到的固定比对比特组合,从而得到有效对比比特。
8.步骤b所述的根据周内秒和帧计数的递推关系进行时变信息推算,具体包括如下步骤:当时变信息是周内秒时,当前帧周内秒为上一帧周内秒加6秒;presow =(lastsow 6)`4800,presow是当前帧周内秒,lastsow为上一帧周内秒;一帧数据为300比特,每比特为20ms;%为取余数操作;当时变信息为帧计数时,当前帧计数为上一帧计数加1;prefreamcnt=(lastfreamcnt 1)%5;prefreamcnt为当前帧计数,lastfreamcnt为上一帧计数;%为取余数操作。
9.步骤s6所述的将步骤s5得到的有效对比比特,与步骤s1保存的比对模板进行逐比特对比,并统计各比特翻转的状态,具体为将将步骤s5得到的有效对比比特,与步骤s1保存的比对模板,进行逐比特异或操作,得到比对结果比特串,并根据比对结果比特串进行各比特翻转状态的统计。
10.步骤s7所述的根据步骤s6统计得到的各比特翻转的状态,对半周跳变进行检测,具体包括如下步骤:根据得到的比对结果比特串,采用如下规则进行半周跳变判定:若比对结果比特串为全0,则判定未发生了半周跳变;若比对结果比特串为全1,则判定发生了半周跳变;若比对结果中出现不连续的0、1混合状态,则采用如下步骤进行进一步判定:每比对完一个完整的字则对该字进行校验:若校验不通过,则判定出现误码;若校验通过,则认定当前比对模板失效,并采用现有的同步头方法进行半周跳变判定;若比对结果中出现“连续的0”或“连续的1”的状态,则采用如下步骤进行进一步判定:若“连续的0”中出现0的次数大于设定的阈值,则判定未发生半周跳变;若“连续的1”中出现1的次数大于设定的阈值,则判定发生了半周跳变;所述的“连续”,定义为相邻的n个比特的取值均相同;n为设定的正整数。
11.步骤s8所述的对比对模板进行更新,具体包括如下步骤:
若待检测的导航电文的载噪比小于或等于设定的载噪比阈值,则模板不更新,不对电文半周跳状态进行判断;若根据各比特翻转的状态进行半周跳变检测时判定比对模板失效,则采用如下步骤进行比对模板更新:保留当前被判定为失效的失效比对模板;保存新收到的导航电文,作为临时比对模板;当下一次接收到相同子帧时,将当前子帧与失效比对模板和临时比对模板分别进行比较:若当前子帧与失效比对模板相同,则认定失效比对模板判定错误,将当前的失效比对模板作为新的比对模板;若当前子帧与临时比对模板相同,则认定失效比对模板判定正确,将临时比对模板作为新的比对模板;若当前子帧与失效比对模板不同且与临时子帧也不同时,将当前子帧替换临时子帧;完成比对模板的更新。
12.本发明提供的这种导航电文半周跳变检测方法,针对接收机在复杂场景中信号变化可能出现的不确定性而导致的半周跳的情况,通过数据比特和载波相位变化一致性以及导航电文在星历有效期内的不变特点,与保存模板比较对应数据比特从而快速精确判断半周跳的位置并给予指示,因此本发明能够有效提高半周跳探测的准确性和及时性,适用于多系统多频接收机,能够准确探测出载波相位信号中是否发生半周跳,提高了半周跳探测的灵敏度,而且检测速度快、检测可靠性高且适用范围广。
附图说明
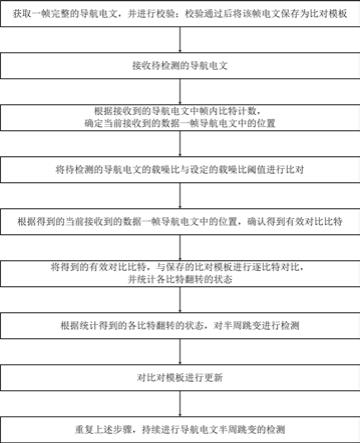
13.图1为本发明的检测方法的方法流程示意图。
14.图2为本发明的对比例中同步头方法的半周跳检测最好情况的示意图。
15.图3为本发明的对比例中同步头方法的半周跳检测最坏情况的示意图。
16.图4为本发明的对比例中本发明方法的半周跳检测最好情况的示意图。
17.图5为本发明的对比例中本发明方法的半周跳检测最坏情况的示意图。
具体实施方式
18.如图1所示为本发明的检测方法的方法流程示意图:本发明提供的这种导航电文半周跳变检测方法,包括如下步骤:s1. 获取一帧完整的导航电文,并进行校验;校验通过后将该帧电文保存为比对模板;s2. 接收待检测的导航电文;s3. 根据接收到的导航电文中帧内比特计数,确定当前接收到的数据一帧导航电文中的位置;s4. 将待检测的导航电文的载噪比与设定的载噪比阈值进行比对:若待检测的导航电文的载噪比大于设定的载噪比阈值,则进行后续步骤;若待检测的导航电文的载噪比小于或等于设定的载噪比阈值,则跳转到步骤s8;s5. 根据步骤s3得到的当前接收到的数据一帧导航电文中的位置,确认得到有效对比比特;具体包括如下步骤:
a. 根据步骤s3得到的当前接收到的数据一帧导航电文中的位置,将导航电文划分为时变比特和固定比特;b. 针对时变比特,根据周内秒和帧计数的递推关系进行时变信息推算,从而得到时变信息的比特,增加可用比对比特;具体实施时,采用如下步骤进行换算:当时变信息是周内秒时,当前帧周内秒为上一帧周内秒加6秒;presow =(lastsow 6)`4800,presow是当前帧周内秒,lastsow为上一帧周内秒;一帧数据为300比特,每比特为20ms;%为取余数操作;由于一周为3600*24*7=604800秒,因此对604800取余数,就得到周内秒;当时变信息为帧计数时,当前帧计数为上一帧计数加1;prefreamcnt=(lastfreamcnt 1)%5;prefreamcnt为当前帧计数,lastfreamcnt为上一帧计数;%为取余数操作;同理,帧计数的值是1~5,而当帧计数取5时,5 1=6会大于5,因此采用对5取余数的方式,6%5=1,相当于是下一帧;c. 针对固定比特,直接将固定比特作为固定比对比特;d. 将步骤b得到的时变比对比特和步骤c得到的固定比对比特组合,从而得到有效对比比特;s6. 将步骤s5得到的有效对比比特,与步骤s1保存的比对模板进行逐比特对比,并统计各比特翻转的状态;具体为将将步骤s5得到的有效对比比特,与步骤s1保存的比对模板,进行逐比特异或操作,得到比对结果比特串,并根据比对结果比特串进行各比特翻转状态的统计;s7. 根据步骤s6统计得到的各比特翻转的状态,对半周跳变进行检测;具体包括如下步骤:根据得到的比对结果比特串,采用如下规则进行半周跳变判定:若比对结果比特串为全0,则判定未发生了半周跳变;若比对结果比特串为全1,则判定发生了半周跳变;若比对结果中出现不连续的0、1混合状态,则采用如下步骤进行进一步判定:每比对完一个完整的字则对该字进行校验:若校验不通过,则判定出现误码,此时对该卫星的该频点进行降权使用;若校验通过,则认定当前比对模板失效(认定当前子帧处于模板更新期,并认定对比模板无效),并采用现有的同步头方法进行半周跳变判定;若比对结果中出现“连续的0”或“连续的1”的状态,则采用如下步骤进行进一步判定:若“连续的0”中出现0的次数大于设定的阈值,则判定未发生了半周跳变;若“连续的1”中出现1的次数大于设定的阈值,则判定发生了半周跳变;所述的“连续”,定义为相邻的n个比特的取值均相同;n为设定的正整数;s8. 对比对模板进行更新;具体包括如下步骤:若待检测的导航电文的载噪比小于或等于设定的载噪比阈值,模板不更新,不对电文半周跳状态进行判断;若根据各比特翻转的状态进行半周跳变检测时判定比对模板失效,则采用如下步骤进行比对模板更新:
保留当前被判定为失效的失效比对模板;保存新收到的导航电文,作为临时比对模板;当下一次接收到相同子帧时,将当前子帧与失效比对模板和临时比对模板分别进行比较:若当前子帧与失效比对模板相同,则认定失效比对模板判定错误,将当前的失效比对模板作为新的比对模板;若当前子帧与临时比对模板相同,则认定失效比对模板判定正确,将临时比对模板作为新的比对模板;若当前子帧与失效比对模板不同且与临时子帧也不同时,将当前子帧替换临时子帧;完成比对模板的更新;s9. 重复步骤s2~s8,持续进行导航电文半周跳变的检测。
19.以下结合图片和理论,对本发明的有效性进行分析和对比:针对现有的在电文校验过程中进行同步头校验判断半周跳的情况,l1ca是6s一帧,所以要进行同步头的翻转判断时需要6s以上。因为基带往上送数据是10bits每次,所以其最好情况和最坏情况分别如下:最好的情况:如图2所示;出现在第一包收到的第一比特刚好是同步头的第一比特,并且是第1比特开始翻转的;收满30包即收满一帧,就可以进行校验判断;这种情况下耗时最短,为6秒钟;最坏的情况:如图3所示,从同步头开始翻转,并且翻转的第1比特出现在同步头的第2比特,则第一次的判断是一个错误的值,至少要收齐两帧才能给出电文的正确翻转状态;如果同步头在第一包的第2bit出现,则在校验时需要多收9比特;所以最坏的时间是要收齐610比特数据才能进行判断,共需要12.2s;采用本发明方法的情况下:最好的情况:如图4所示;基带往上送数据是10比特每次,收齐40比特就可以进行判断,因此最短耗时为0.8s(20ms*40);最坏的情况;如图5所示;最长需要的比对时间为1.00s(20ms*50)。
20.综上所述,现有方法和本发明方法的最好时长、最坏时长如表1所示:表1理论分析下现有方法与本发明方法在最好与最坏情况下的耗时对比表以下在真实环境下,通过rtk失锁重捕获输出固定解的时间对本发明的半周跳检测方法与现有检测方法进行对比分析:rtk失锁重捕获输出正确固定解的快慢是高精度定位的一个重要指标,也是对接收机环路稳定和半周跳探测有效与否的最好体现。高精度接收机能够在更短的时间内完成rtk失锁重捕获并输出正确的固定解,是其在应用中可以应对各种复杂场景的性能体现。
21.本实验是在其它环境相同情况下,采用两台同型号的接收机,其中一台使用同步头(现有技术)进行半周跳检测,另一台是采用本发明检测方法,并对两台接收机进行对比。使用继电器对信号通断进行控制,导通信号110s并切断信号10s来模拟真实场景天线的遮挡,并一共进行了590次测试,测试结果统计如表2所示:
表2 现有方法与本发明方法的检测耗时对比表从表2的数据可以看到,本发明方法对rtk失锁重固定时间的提高,具有非常好的效果,能够极大的缩短rtk平均失锁重捕时间。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。