1.本发明属于智能交通领域,具体为一种基于动态时空图卷积循环网络的交通流预测方法、设备及存储介质。
背景技术:
2.道路交通是社会经济活动的动脉,对城市经济的可持续发展和人民生活水平的提高具有极其重要的作用。近年来,随着城市化进程的不断推进,大量的人口涌入城市工作生活,机动车保有量与出行需求也日益增长,导致城市交通拥堵问题越来越严重。为了缓解城市的交通压力,各国纷纷把目光投向智能交通系统(its,intelligent transportation system)。交通流预测是its研究的热点,预测的结果可以为交通管理部门提供科学的交通诱导依据。交通系统是个复杂的体系,交通流变化过程是一个实时、非线性、高维、非平稳的随机过程。传统的交通流预测方法依赖数据驱动,仅考虑交通流数据的时序特征,忽略了路网的空间拓扑,割裂了交通流的时间相关性与空间相关性。近年来,图卷积网络被应用到交通流预测中,能够有效地挖掘路网复杂的拓扑结构。然而,它只是构建一个静态图,并赋予固定的权值来表示节点间的关联,忽略了节点间的关联是随时间而动态变化的。因此,目前迫切需要一种基于动态时空图卷积循环网络的交通流预测方法,随时间变化构造不同的动态时空关系图,充分捕获交通流的动态时空依赖性,提高交通流预测结果的精确度,为交通管理部门提供可靠的信息支撑,对制定相应的交通管制措施具有积极的意义。
技术实现要素:
3.本发明的目的在于针对上述现有技术存在的问题,提供一种基于动态时空图卷积循环网络的交通流预测方法,通过构建路网的动态时空关系图,构造动态时空图卷积循环模块,建立基于动态时空图卷积循环网络的交通流预测模型,从而充分捕获交通流的动态时空依赖性,提升交通流预测任务的能力,为交通管理部门提供科学的交通诱导依据。
4.实现本发明目的的技术解决方案为:一种基于动态时空图卷积循环网络的交通流预测方法,其特征在于,所述方法包括以下步骤:
5.步骤1,构建路网的动态时空关系图;
6.步骤2,构造动态时空图卷积循环模块;
7.步骤3,建立基于动态时空图卷积循环网络的交通流预测模型;
8.步骤4,对交通流数据进行预处理及数据集划分;
9.步骤5,训练基于动态时空图卷积循环网络的交通流预测模型;
10.步骤6,基于训练后的模型进行交通流预测。
11.优选地,步骤1构建路网的动态时空关系图,具体步骤包括:
12.步骤1-1,构建基于空间距离的静态图:
13.根据交通流数据传感器的地理位置信息,构建路网的加权拓扑关系图,其中,传感
器作为图的节点,传感器的连接关系作为图的边;
14.构造邻接矩阵来描述传感器的空间关系,邻接矩阵的权值由传感器在路网中的空间距离计算,具体为:
[0015][0016]
式中,a
ijdist
表示静态图的邻接矩阵中节点i和节点j的连接权值,为节点i和节点j的在路网中的空间距离,σ1为节点间距离的标准差,ε1为控制阈值;
[0017]
步骤1-2,构建基于流量相关性的动态图:
[0018]
利用皮尔逊相关系数计算相邻节点间流量的相关性,具体为:
[0019]
假设节点vi的流量为邻居节点vj的流量为t为当前时刻,t为时间滑动时间窗口,则节点vi与vj间流量的相关性表示为:
[0020][0021]
节点间的相关性sim(vi,vj)为:
[0022][0023]
构造邻接矩阵来描述节点间相关性的动态时空拓扑图,邻接矩阵的权值由节点间的相关性计算,具体为:
[0024][0025]
式中,a
ijsim
表示动态图的邻接矩阵中节点i和节点j的连接权值,为节点i和节点j的在路网中的空间距离,σ2为节点间流量的相关性的标准差,ε2为控制阈值;
[0026]
步骤1-3,堆叠基于空间距离的静态图与基于流量相关性的动态图,构建路网的动态时空关系图:
[0027][0028]
式中,a
ij
表示动态时空关系图的邻接矩阵中节点i和节点j的连接权值,为节点i和节点j的在路网中的空间距离,σ1为节点间距离的标准差,σ2为节点间流量的相关性
的标准差,α、β为权重系数,ε为控制阈值。
[0029]
优选地,所述动态时空图卷积循环模块包括动态时空图卷积层和循环层;
[0030]
动态时空图卷积层将动态时空关系图作为网络的图输入,随着滑动时间窗口的移动,不断更新动态时空关系图;并将交通流数据输入到动态时空图卷积层,捕获交通流的动态空间依赖性,输出具有空间特征的时间序列信息,如下式所示:
[0031][0032]
式中,x为输入的交通流时间序列矩阵,x
′
为输出的具有空间特征的新时间序列矩阵,表示处理过程,w为权重矩阵,σ表示sigmoid激活函数,gcn(
·
)表示图卷积运算;且in为单位矩阵,a表示邻接矩阵,为中的元素;
[0033]
动态时空图卷积层输出的具有空间特征的时间序列信息输入到循环层,捕获交通流的动态时间依赖性,输出具有时空特征的隐藏层信息,如下式所示:
[0034]
x
″
=lstm(x
′
)
[0035]
具体结合过程如下:
[0036]ft
=σ(wf[h
t-1
,x
′
t
] bf)
[0037]it
=σ(wi[h
t-1
,x
′
t
] bi)
[0038][0039][0040]ot
=σ(wo[h
t-1
,x
′
t
] bo)
[0041]ht
=o
t
⊙
tanh(c
t
)
[0042]
式中,lstm(
·
)表示循环层运算,x
′
表示循环层的输入,x"表示循环层的输出。x
t
′
表示t时刻的输入,h
t-1
为上一时刻的隐藏状态,h
t
为更新的隐藏状态;f
t
、i
t
、o
t
表示遗忘门、输入门、输出门;c
t-1
、c
t
为记忆单元的状态;wf、wi、wo和bf、bi、bo表示训练过程中的权重矩阵和偏置项,
⊙
表示矩阵元素对应相乘。
[0043]
优选地,步骤3建立基于动态时空图卷积循环网络的交通流预测模型,具体包括:
[0044]
步骤3-1,由若干个动态时空图卷积循环模块通过残差连接,集成动态时空图卷积循环层,从浅层信息中提取时空特征进行聚合,生成更深层次的隐藏层信息:
[0045]
dstgcrl(x)=dstgcrm(relu(
…
relu(dstgcrm(x))))
[0046]
式中,dstgcrl(
·
)表示动态时空图卷积循环层运算,relu(
·
)表示激活函数;
[0047]
步骤3-2,依次连接2个动态时空图卷积循环层、1个注意力机制层、1个全连接层,建立基于动态时空图卷积循环网络的交通流预测模型;
[0048]
所述动态时空图卷积循环层用于输出具有动态时空特征的隐藏层信息,注意力机制层为隐藏层的节点分配不同的权重,全连接层输出结果:
[0049]
f(x,a)=fc(leakyrelu(attention(dstgcrl(relu(dstgcrl(x))))))
[0050]
式中,f(
·
)表示模型输出,attention(
·
)表示注意力机制,fc(
·
)表示全连接层,leakyrelu(
·
)、relu(
·
)为激活函数。
[0051]
优选地,步骤4所述交通流数据预处理及数据集划分,具体包括:
[0052]
步骤4-1,选取现实世界的交通流数据集,包括传感器的地理位置信息、传感器采集的交通流数据;
[0053]
步骤4-2,对交通流数据集进行数据清洗,并采用线性插值法来填充缺失的数据;
[0054]
步骤4-3,采用z-score方法对数据集进行标准化处理;
[0055]
步骤4-4,采用留出法将数据集划分为训练集、测试集和验证集。
[0056]
优选地,训练基于动态时空图卷积循环网络的交通流预测模型的具体方法为:
[0057]
步骤5-1,选择均方误差mse作为损失函数,选择adam算法作为参数优化器,设置模型参数学习率,设置batch大小;
[0058]
步骤5-2,从训练集中随机选取batch大小的数据送入模型训练,不断更新模型参数,直至满足训练停止条件,获得训练后的交通流预测模型。
[0059]
一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现以下步骤:
[0060]
步骤1,构建路网的动态时空关系图;
[0061]
步骤2,构造动态时空图卷积循环模块;
[0062]
步骤3,建立基于动态时空图卷积循环网络的交通流预测模型;
[0063]
步骤4,交通流数据预处理及数据集划分;
[0064]
步骤5,训练基于动态时空图卷积循环网络的交通流预测模型;
[0065]
步骤6,基于训练后的模型进行交通流预测。
[0066]
一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
[0067]
步骤1,构建路网的动态时空关系图;
[0068]
步骤2,构造动态时空图卷积循环模块;
[0069]
步骤3,建立基于动态时空图卷积循环网络的交通流预测模型;
[0070]
步骤4,交通流数据预处理及数据集划分;
[0071]
步骤5,训练基于动态时空图卷积循环网络的交通流预测模型;
[0072]
步骤6,基于训练后的模型进行交通流预测。
[0073]
本发明与现有技术相比,其显著优点为:
[0074]
1)本发明构建了随时间变化的动态时空关系图,摆脱了现有静态图方法的局限;利用节点间流量的皮尔逊相关系数计算节点间的相关性,随着滑动时间窗口的移动不断更新节点间的相关性;堆叠基于距离的静态图与基于节点间流量相关性的动态图,构建路网的时空关系图;路网的时空关系图是随着输入值而动态变化的,并且能够有效解释交通流的动态时空依赖性。
[0075]
2)本发明构造了动态时空图卷积循环模块,融合动态时空关系图、图卷积网络与长短期记忆网络,摆脱了传统深度学习方法仅依赖数据驱动的局限,兼顾了交通流动态变化的空间特征与时间特征,有效地捕获交通流的动态时空依赖性。
[0076]
3)本发明建立了基于动态时空图卷积循环网络的交通流预测模型,数据首先输入到动态时空图卷积循环网络层,提取交通流的动态时空特征,再引入注意力机制分配不同的权重,从而进行有区别的信息聚合,最后由全连接层输出结果,提升了模型的预测性能。
[0077]
下面结合附图对本发明作进一步详细描述。
附图说明
[0078]
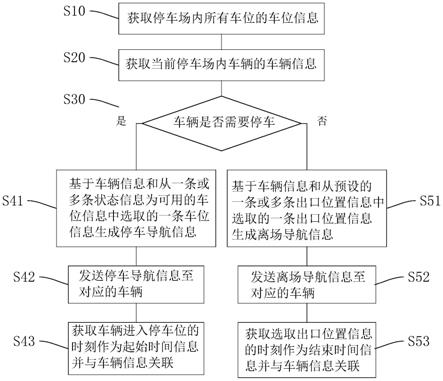
图1为一个实施例中基于动态时空图卷积循环网络的交通流预测方法的流程图。
[0079]
图2为一个实施例中路网的动态时空关系图的构建流程图。
[0080]
图3为一个实施例中动态时空图卷积循环模块的结构图。
[0081]
图4为一个实施例中基于动态时空图卷积循环网络的交通流预测模型的结构图。
[0082]
图5为一个实施例中pems04数据集交通流预测结果的示意图。
具体实施方式
[0083]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
[0084]
另外,需要说明的是,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
[0085]
在一个实施例中,结合图1,提供了一种基于动态时空图卷积循环网络的交通流预测方法,所述方法包括以下步骤:
[0086]
步骤1,构建路网的动态时空关系图;
[0087]
步骤2,构造动态时空图卷积循环模块;
[0088]
步骤3,建立基于动态时空图卷积循环网络的交通流预测模型;
[0089]
步骤4,交通流数据预处理及数据集划分;
[0090]
步骤5,训练基于动态时空图卷积循环网络的交通流预测模型;
[0091]
步骤6,基于训练后的模型进行交通流预测并评估模型的预测性能。
[0092]
进一步地,步骤1所述构建路网的动态时空关系图(dynamic spatio-temporal graph,dst-graph),具有包括:
[0093]
步骤1-1,构建基于空间距离的静态图:
[0094]
根据交通流数据传感器的地理位置信息,构建路网的加权拓扑关系图。传感器作为图的节点,传感器的连接关系作为图的边。构造邻接矩阵来描述传感器的空间关系,邻接矩阵的权值由传感器在路网中的空间距离计算。邻接矩阵的权值可通过阈值高斯核函数得到:
[0095][0096]
式中,a
ijdist
表示静态图的邻接矩阵中节点i和节点j的连接权值,为节点i和节点j的在路网中的空间距离,σ1为节点间距离的标准差,ε1为控制阈值;
[0097]
步骤1-2,构建基于流量相关性的动态图:
[0098]
如果每个时间切片的间隔足够短,在某一瞬间则可以认为相邻节点的流量存在线性相关,即同一时刻在路网中的两个相邻节点的交通状态存在相似性。利用皮尔逊相关系数(pearson correlation coefficient)来计算相邻节点间流量的相关性。
[0099]
假设节点vi的流量为邻居节点vj的流量为t为当前时刻,t为滑动时间窗口。则节点vi与vj间流量的相关性可表示为:
[0100][0101]
由于r(xi,xj)取值为[-1,1],即节点间流量存在正相关与负相关。仅考虑相邻节点的相关性,当节点间无边相连接时不计算,取绝对值后得到节点间的相关性sim(vi,vj),即
[0102][0103]
构造邻接矩阵来描述节点间相关性的动态时空拓扑图,邻接矩阵的权值由节点间的相关性计算。邻接矩阵的权值可通过阈值高斯核函数得到:
[0104][0105]
式中,a
ijsim
表示动态图的邻接矩阵中节点i和节点j的连接权值,为节点i和节点j的在路网中的空间距离,σ2为节点间流量的相关性的标准差,ε2为控制阈值;
[0106]
步骤1-3,堆叠基于空间距离的静态图与基于流量相关性的动态图,构建路网的动态时空关系图:
[0107][0108]
式中,a
ij
表示动态时空关系图的邻接矩阵中节点i和节点j的连接权值,为节点i和节点j的在路网中的空间距离,σ1为节点间距离的标准差,σ2为节点间流量的相关性的标准差,α、β为权重系数,ε为控制阈值。
[0109]
在一个滑动时间窗口t内,路网节点的流量输入表示为:
[0110][0111]
随着滑动时间窗口t的移动,每次输入的节点流量不断变化,则节点间的相关性sim(vi,vj)也不断变化。因此,邻接矩阵的a
ij
是随着输入值而动态变化的,从而构建了路网的动态时空关系图。由于该图构建方法兼顾了空间距离和流量相关性,因此可以解释交通流的动态时空依赖性。
[0112]
进一步地,在其中一个实施例中,结合图3,步骤2所述构造动态时空图卷积循环模块,具体包括:
[0113]
步骤2-1,基于动态时空关系图和图卷积网络搭建动态时空图卷积层:
[0114]
按照时间步的顺序,依次输入不同滑动时间窗口的交通流数据,根据步骤1构建当前时间步的动态时空关系图。基于kipf和welling提出的一阶切比雪夫近似的图卷积网络(graphconvolutionalnetwork,gcn)架构,将动态时空关系图作为网络的图输入,搭建动态时空图卷积层。gcn的基本算法如下:
[0115]
在图谱理论中,图可以由其对应的拉普拉斯矩阵表示,定义为l=d-a,归一化形式为其中,a表示邻接矩阵,in为单位矩阵,度矩阵d为对角矩阵,d
ii
=∑
jaij
。
[0116]
在图信号处理中,图信号是图上节点的特征向量。根据图谱卷积理论,时域中输入信号x和卷积核g的卷积操作可转换为频域的内积形式,即:
[0117][0118]
式中,为傅里叶变换,
⊙
为哈达玛积,*g为图卷积运算。
[0119]
将卷积核g的傅里叶变换写成对角矩阵,即g
θ
=diag(u
t
g),则图卷积可简化为
[0120]
x*gg
θ
=ug
θut
x
[0121]
由于g
θ
(λ)的计算复杂度较高,考虑用一阶切比雪夫多项近似计算,即那么,
[0122]
layers)。通过堆叠动态时空图卷积循环模块增加网络深度,从浅层信息中提取时空特征进行聚合,生成更深层次的隐藏层信息。
[0145]
dstgcrl(x)=dstgcrm(relu(
…
relu(dstgcrm(x))))
[0146]
式中,dstgcrl(
·
)表示动态时空图卷积循环层运算,relu(
·
)表示激活函数。
[0147]
步骤3-2,依次连接的2个动态时空图卷积循环层、1个注意力机制层(attention mechanism)、1个全连接层(fully-connected layers),建立基于动态时空图卷积循环网络(dynamic spatio-temporal graph convolutional recurrent network,dstgcrn)的交通流预测模型。动态时空图卷积循环层的激活函数为relu函数,注意力机制层的激活函数为leakyrelu函数。通过动态时空图卷积循环层输出具有动态时空特征的隐藏层信息,再引入注意力机制为隐藏层的节点分配不同的权重,从而进行有区别的信息聚合,最后由全连接层输出结果。
[0148]
f(x,a)=fc(leakyrelu(attention(dstgcrl(relu(dstgcrl(x))))))
[0149]
式中,f(
·
)表示模型输出,attention(
·
)表示注意力机制,fc(
·
)表示全连接层,leakyrelu(
·
)、relu(
·
)为激活函数。
[0150]
进一步地,在其中一个实施例中,步骤4所述交通流数据预处理及数据集划分,具体包括:
[0151]
步骤4-1,选取现实世界的交通流数据集,包括传感器的地理位置信息、传感器采集的交通流数据;
[0152]
步骤4-2,对交通流数据集进行数据清洗,并采用线性插值法来填充缺失的数据。
[0153]
步骤4-3,采用z-score方法对数据集进行标准化处理,处理后数据的均值为0,标准差为1,即
[0154][0155]
式中,x为传感器采集到的交通流数据,μ为原始数据的均值,σ为原始数据的标准差,x
′
为标准化后的数据;
[0156]
步骤4-4,采用留出法将数据集划分为训练集、测试集和验证集,其原理类似于分层抽样,为了保证随机性,会多次进行按比例划分数据集,然后对多次划分的结果取平均值。
[0157]
进一步地,在其中一个实施例中,步骤5所述训练基于动态时空图卷积循环网络的交通流预测模型,具体包括:
[0158]
步骤5-1,选择均方误差mse作为损失函数,选择adam算法作为参数优化器,设置模型参数学习率,设置batch大小;
[0159]
步骤5-2,从训练集中随机选取batch大小的数据送入模型训练,不断更新模型参数,直至满足训练停止条件,获得训练后的交通流预测模型。
[0160]
步骤6,基于训练后的模型进行交通流预测,输出交通流预测的结果,同时选择基线模型作对比参照;
[0161]
对于预测模型的性能评估,本质是将实际值与预测值进行比较。选用平均绝对误差、平均绝对百分比误差和均方根误差三种误差函数作为评价模型预测效果的指标。
[0162]
上述基于动态时空图卷积循环网络的交通流预测方法中的各个模块可全部或部
分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0163]
在一个实施例中,提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现以下步骤:
[0164]
步骤1,构建路网的动态时空关系图;
[0165]
步骤2,构造动态时空图卷积循环模块;
[0166]
步骤3,建立基于动态时空图卷积循环网络的交通流预测模型;
[0167]
步骤4,交通流数据预处理及数据集划分;
[0168]
步骤5,训练基于动态时空图卷积循环网络的交通流预测模型;
[0169]
步骤6,基于训练后的模型进行交通流预测并评估模型的预测性能。
[0170]
关于每一步的具体限定可以参见上文中对于基于动态时空图卷积循环网络的交通流预测方法的限定,在此不再赘述。
[0171]
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
[0172]
步骤1,构建路网的动态时空关系图;
[0173]
步骤2,构造动态时空图卷积循环模块;
[0174]
步骤3,建立基于动态时空图卷积循环网络的交通流预测模型;
[0175]
步骤4,交通流数据预处理及数据集划分;
[0176]
步骤5,训练基于动态时空图卷积循环网络的交通流预测模型;
[0177]
步骤6,基于训练后的模型进行交通流预测并评估模型的预测性能。
[0178]
关于每一步的具体限定可以参见上文中对于基于动态时空图卷积循环网络的交通流预测方法的限定,在此不再赘述。
[0179]
作为一种具体示例,在其中一个实施例中,对本发明基于动态时空图卷积循环网络的交通流预测方法进行进一步验证说明。
[0180]
本实施例中,以美国加利福尼亚州交通局性能测量系统(caltrans performance measurement system,pems)采集到的pems04数据集为例。pems04采集于旧金山湾区,包含307个检测器,时间范围从2018年1月1日至2月28日,时间间隔为5分钟,共16992个样本。pems04包括传感器间距离和交通流数据,其中交通流数据为传感器采集的流量、速度和密度数据,本实施例中选取流量进行预测分析。
[0181]
根据传感器间距离和交通流流量数据,结合皮尔逊相关系数,构建路网的动态时空关系图。融合动态时空关系图、图卷积网络与长短期记忆网络,构造动态时空图卷积循环模块,从而建立基于动态时空图卷积循环网络的交通流预测模型。
[0182]
将样本按照约7:2:1的比例划分为训练集、测试集和验证集。定义滑动时间窗口的大小为7,前6个时序数据为输入值,最后1个时序数据为标签,组成了一个训练样本,即用前30分钟的交通数据预测未来5分钟的交通状态。在训练之前,对数据集进行z-score标准化处理,预测时再通过反标准化得到最终结果。选取var、svr、lstm、stgcn作为基线模型,与dstgcrn模型进行对比分析。利用pytorch深度神经网络框架搭建网络模型,设置均方误差mse作为损失函数,选择adam算法作为参数优化器,模型参数学习率设置为10-3
,batch大小
为64。实验在intel(r)xeon(r)cpu e5-2660 v2处理器和nvidia geforce gtx titan x显卡上进行。
[0183]
结合图5,本发明方法的性能评估指标如表1所示:
[0184]
表1不同模型在数据集上的性能指标
[0185][0186]
通过本发明方法的预测流程所得到的预测结果可以看出,本发明方法能够实现pems04数据集的交通流预测。如表1所示,与基线模型相比,dstgcrn模型在mae、mape和rmse这3种性能指标下效果提升明显,分别为19.15、12.89%和28.88。结合图5,dstgcrn模型在一天中的预测结果与数据真实值ground truth最为接近,说明dstgcrn模型通过训练获得了最佳的预测性能。
[0187]
综上,本发明提供的基于动态时空图卷积循环网络的交通流预测方法,能够有效地捕获交通流的动态时空依赖性,模型的预测精度较高且可解释性强。预测的结果能够为交通管理部门提供可靠的信息支撑,对制定相应的交通管制措施具有积极的意义。
[0188]
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0189]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。