1.本发明涉及一种对衬底进行特定处理的衬底洗净装置、衬底处理装置及衬底洗净方法。
背景技术:
2.为对液晶显示装置或有机el(electro luminescence:电致发光)显示装置等所使用的fpd(flat panel display:平板显示器)用衬底、半导体衬底、光盘用衬底、磁盘用衬底、光磁盘用衬底、光掩模用衬底、陶瓷衬底或太阳能电池用衬底等各种衬底进行各种处理,而使用衬底处理装置。为洗净衬底,而使用衬底洗净装置。
3.日本专利第5904169号公报所记载的衬底洗净装置具备:2个吸附焊盘,保持晶圆的背面周缘部;旋转卡盘,保持晶圆的背面中央部;及刷子,洗净晶圆的背面。2个吸附焊盘保持晶圆且横向移动。在所述状态下,由刷子洗净晶圆的背面中央部。之后,旋转卡盘从吸附焊盘接受晶圆,旋转卡盘保持晶圆的背面中央部且旋转。在所述状态下,由刷子洗净晶圆的背面周缘部。
技术实现要素:
4.为减少洁净室内所占据的衬底洗净装置的设置地面面积(占地面积),而谋求衬底洗净装置的小型化。然而,在所述衬底洗净装置中,晶圆横向移动时,包围晶圆的较大型部件(具体来说为上杯)也与晶圆一起横向移动。因此,难以在水平方向上使衬底洗净装置小型化。
5.本发明的目的在于提供一种能够减少占地面积的增加且洗净衬底的整个下表面的衬底洗净装置及衬底洗净方法。
6.另外,所述上杯是为洗净晶圆时接住从晶圆飞散的洗净液而使用。因此,如果为使日本专利第5904169号公报的衬底洗净装置小型化而去除上杯,那么无法防止包含污染物质的洗净液飞散。在所述情况下,无法将衬底洗净装置的清洁度维持得较高。
7.本发明的另一目的在于提供一种能够减少占地面积的增加且洗净衬底的整个下表面并且能够将清洁度维持得较高的衬底洗净装置及具备它的衬底处理装置。
8.(1)依照本发明的一方式的衬底洗净装置具备:第1衬底保持部,保持衬底的外周端部;第2衬底保持部,在第1衬底保持部下方的位置吸附保持衬底的下表面中央部;移动部,使衬底在第1衬底保持部与第2衬底保持部之间移动;洗净具,与衬底的下表面接触来洗净衬底的下表面;洗净具升降部,从下方支撑洗净具,且使洗净具在洗净具与利用第1衬底保持部保持的衬底的下表面接触的第1高度位置、与洗净具与利用第2衬底保持部保持的衬底的下表面接触的第2高度位置之间升降;旋转驱动部,从下方支撑第2衬底保持部,且使第2衬底保持部绕上下方向的轴旋转;台座部,以俯视下洗净具与第2衬底保持部相互分开的方式,支撑洗净具升降部及旋转驱动部;及台座移动部,在利用第1衬底保持部保持衬底的状态下,使台座部在第2衬底保持部与衬底的下表面中央部对向且洗净具与包围衬底的下
表面中央部的下表面外侧区域对向的第1水平位置、与第2衬底保持部与衬底的下表面外侧区域对向且洗净具与衬底的下表面中央部对向的第2水平位置之间移动。
9.在所述衬底洗净装置中,在利用第1衬底保持部保持衬底的外周端部的状态下,台座部移动到第2水平位置。在台座部处于第2水平位置的状态下,第2衬底保持部与衬底的下表面外侧区域对向且洗净具与衬底的下表面中央部对向。在所述情况下,通过洗净具升降部使洗净具向第1高度位置升降,而能够由洗净具洗净利用第1衬底保持部保持的衬底的下表面中央部。
10.另一方面,在利用第1衬底保持部保持衬底的外周端部的状态下,台座部移动到第1水平位置。在台座部位于第1水平位置的状态下,第2衬底保持部与衬底的下表面中央部对向且洗净具与衬底的下表面外侧区域对向。在所述情况下,通过移动部使衬底从第1衬底保持部移动到第2衬底保持部,无需水平方向的衬底的移动,能够利用第2衬底保持部吸附保持衬底的下表面中央部。这时,通过使第2衬底保持部绕上下方向的轴旋转且洗净具升降部使洗净具向第2高度位置升降,能够由洗净具洗净利用第2衬底保持部保持的衬底的下表面外侧区域。
11.这样,根据依照本发明的一方式的衬底洗净装置,为分别洗净衬底的下表面中央部与下表面外侧区域,无需衬底向水平方向移动。因此,能够减少占地面积的增加且洗净衬底的整个下表面。
12.(2)衬底洗净装置也可还具备安装洗净具的被安装部件,洗净具升降部通过能够升降地支撑被安装部件而支撑洗净具。由此,洗净具能够经由被安装部件升降地由洗净具升降部支撑。
13.(3)衬底洗净装置也可还具备:洗净液供给部,安装于被安装部件,在利用洗净具洗净衬底的下表面时,对衬底的下表面供给洗净液。
14.在所述情况下,能够从洗净具的附近位置对利用洗净具洗净衬底的下表面的部分有效地供给洗净液。由此,减少洗净液的消耗量且抑制洗净液的过度飞散。
15.(4)被安装部件也可具有在远离第2衬底保持部的方向上向斜下方倾斜的上表面。在所述情况下,在利用洗净具从衬底的下表面去除的污染物质落下到被安装部件的上表面的情况下,利用被安装部件的上表面接住的污染物质沿倾斜的上表面导向远离第2衬底保持部的方向。由此,在洗净利用第1衬底保持部保持的衬底的下表面时,减少第2衬底保持部的污染的产生。
16.(5)衬底洗净装置也可还具备在洗净具与第2衬底保持部之间产生带状气流的气流产生部。
17.在所述情况下,在洗净利用第1衬底保持部保持的衬底的下表面时,利用从气流产生部产生的气流,而减少从衬底的下表面去除的污染物质向第2衬底保持部飞散。由此,减少第2衬底保持部的污染的产生。
18.(6)气流产生部也可还安装在被安装部件。在所述情况下,气流产生部与洗净具一体地设置。因此,通过适当设定气流产生部与洗净具的位置关系,而进一步减少从衬底的下表面去除的污染物质向第2衬底保持部飞散。由此,进一步减少第2衬底保持部的污染的产生。
19.(7)气流产生部也可通过向衬底的下表面喷射带状气体,而在洗净具与第2衬底保
持部之间形成气体幕。
20.在所述情况下,因为在洗净具与第2衬底保持部之间形成气体幕,所以防止利用洗净具从衬底的下表面去除的污染物质向第2衬底保持部飞散。由此,进一步减少第2衬底保持部的污染的产生。
21.(8)与衬底的下表面接触的洗净具的接触部分的面积也可大于吸附保持衬底的下表面中央部的第2衬底保持部的吸附部分的面积。
22.在所述情况下,在台座位于第2水平位置的状态下,能够以覆盖衬底的下表面中第2衬底保持部吸附保持的部分的方式使洗净具与衬底的下表面接触。由此,能够不使洗净具在水平方向移动,而洗净利用第2衬底保持部吸附保持的衬底的部分。
23.(9)洗净具升降部在台座部中能够相对于第2衬底保持部在水平方向移动地受支撑,衬底洗净装置也可还具备在台座部中使洗净具升降部相对于第2衬底保持部在水平方向移动的移动驱动部。
24.在所述情况下,在由洗净具洗净利用第2衬底保持部保持的衬底的下表面外侧区域时,能够使洗净具升降部相对于第2衬底保持部在水平方向移动。由此,即使在与衬底的下表面接触的洗净具的接触面积与衬底的下表面外侧区域相比较小的情况下,也能够通过使洗净具升降部相对于第2衬底保持部在水平方向移动,而广范围洗净衬底的下表面。
25.(10)衬底洗净装置也可还具备使洗净具绕在上下方向延伸的轴旋转的洗净具旋转驱动部。在所述情况下,能够通过洗净具在与衬底的下表面接触的状态下旋转,而不使所述洗净具在水平方向移动,物理去除附着在衬底的下表面的污染物质。
26.(11)依照本发明的其它方式的衬底洗净装置具备:第1衬底保持部,不使衬底旋转而在第1高度位置保持衬底的外周端部;第2衬底保持部,在第1高度位置下方的第2高度位置吸附保持衬底的下表面中央部且绕上下方向的轴旋转;衬底移动部,使衬底在第1高度位置与第2高度位置之间移动;洗净具,与衬底的下表面接触来洗净衬底的下表面;洗净具升降部,通过使洗净具升降,而使洗净具在洗净具与利用第1衬底保持部保持的衬底的下表面接触的第1状态、与洗净具与利用第2衬底保持部保持的衬底的下表面接触的第2状态转移;洗净具移动部,在利用第1或第2衬底保持部保持的衬底的下方的位置,使洗净具相对于衬底在水平方向移动;洗净液供给部,对衬底的下表面供给洗净液;及处理杯,以俯视下包围第2衬底保持部的方式设置,在从洗净液供给部对利用第2衬底保持部吸附保持且旋转的衬底供给洗净液的情况下接住从衬底飞散的洗净液;且第1高度位置高于处理杯的上端部,第2高度位置在衬底由第2衬底保持部保持的状态下由洗净具洗净时,低于处理杯的上端部。
27.在所述衬底洗净装置中,利用衬底移动部,将衬底在第1高度位置与第2高度位置之间移动。在衬底位于第1高度位置的状态下,利用第1衬底保持部保持衬底的外周端部。通过洗净具升降部使洗净具升降,洗净具转移到第1状态。对衬底的下表面供给洗净液。
28.这里,第1高度位置高于处理杯的上端部。即使在这样的情况下,因为在衬底由第1衬底保持部保持的状态下,衬底不旋转,所以供给到衬底的洗净液也不易飞散到衬底的外部。由此,能够防止第1衬底保持部与处理杯的干扰,且减少洗净液的飞散并且由洗净具洗净利用第1衬底保持部保持的衬底的下表面中央部。
29.另一方面,在衬底位于第2高度位置的状态下,利用第2衬底保持部吸附保持衬底的下表面中央部,衬底旋转。利用第2衬底保持部保持的衬底的中心位于在第1高度位置利
用第1衬底保持部保持时的衬底的下方。通过洗净具升降部使洗净具升降,洗净具转移到第2状态。对衬底的下表面供给洗净液。
30.这里,因为第2高度位置比处理杯的上端部低,所以在衬底在第2高度位置由第2衬底保持部保持且旋转的状态下,利用处理杯接住供给到衬底并从衬底飞散的洗净液。由此,能够抑制从衬底分散的洗净液所致的衬底洗净装置的清洁度降低,且由洗净具洗净利用第2衬底保持部吸附保持的衬底的下表面外侧区域。
31.如上所述,根据依照本发明的一方式的衬底洗净装置,为分别洗净衬底的下表面中央部与下表面外侧区域,无需衬底向水平方向移动。另外,在洗净衬底的下表面中央部及下表面外侧区域时,减少供给到衬底的下表面的洗净液飞散到衬底的外部。所述的结果,实现能够减少占地面积的增加且洗净衬底的整个下表面并且能够将清洁度维持得较高的衬底洗净装置。
32.(12)衬底洗净装置也可还具备控制第1衬底保持部、第2衬底保持部、衬底移动部、洗净具升降部、洗净具移动部及洗净液供给部的控制部,控制部在洗净衬底的下表面中央部时,以利用洗净具洗净利用第1衬底保持部保持的衬底的下表面中央部的方式,控制第1衬底保持部、洗净具升降部及洗净液供给部,在洗净包围衬底的下表面中央部的下表面外侧区域时,以对利用第2衬底保持部保持的衬底的下表面供给洗净液且利用洗净具洗净下表面外侧区域的方式,控制第2衬底保持部、洗净具升降部、洗净具移动部及洗净液供给部,以将衬底在第1衬底保持部与第2衬底保持部之间移动的方式,控制第1衬底保持部、第2衬底保持部及衬底移动部。
33.在所述情况下,利用洗净具洗净利用第1衬底保持部保持的衬底的下表面中央部。另外,利用洗净具洗净利用第2衬底保持部保持的衬底的下表面外侧区域。在第1衬底保持部与第2衬底保持部之间,利用衬底移动部来移动衬底。由此,顺利洗净衬底的整个下表面。
34.(13)洗净具移动部也可在洗净具接触利用第1衬底保持部保持的衬底的下表面的状态及洗净具接触利用第2衬底保持部保持的衬底的下表面的状态中的至少一个状态下,使洗净具相对于衬底在水平方向移动。
35.根据所述构成,在洗净具接触利用第1衬底保持部保持的衬底的下表面的状态、及洗净具接触利用第2衬底保持部保持的衬底的下表面的状态中的至少一个状态下,扩大衬底的下表面的能够洗净的区域。
36.(14)衬底洗净装置也可还具备:气体供给部,构成为能够对第1衬底保持部所保持的衬底的下表面供给气体,且能够对第2衬底保持部所保持的衬底的下表面供给气体。
37.在所述情况下,在洗净利用第1衬底保持部保持的衬底的下表面后及洗净利用第2衬底保持部保持的衬底的下表面后,利用从气体供给部供给到衬底的气体来干燥衬底的下表面。
38.(15)衬底洗净装置也可还具备使洗净具绕上下方向的轴旋转的洗净具旋转驱动部。
39.在所述情况下,通过洗净具在与衬底的下表面接触的状态下旋转,而能够不使所述洗净具在水平方向移动,物理去除附着在衬底的下表面的污染物质。
40.(16)与衬底的下表面接触的洗净具的接触部分的面积也可大于吸附保持衬底的下表面中央部的第2衬底保持部的吸附部分的面积。
41.在所述情况下,在衬底由第1衬底保持部保持的状态下,能够以覆盖衬底的下表面中第2衬底保持部吸附保持的部分的方式使洗净具与衬底的下表面接触。由此,能够不使洗净具在水平方向移动,洗净利用第2衬底保持部吸附保持的衬底的部分。
42.(17)衬底洗净装置也可还具备:处理杯驱动部,使处理杯在处理杯的上端部高于第2高度位置的上杯位置、与处理杯的上端部低于第2高度位置的下杯位置之间升降;且处理杯驱动部在衬底由第2衬底保持部保持的状态下由洗净具洗净时将处理杯保持在上杯位置,在利用第2衬底保持部保持的衬底的洗净前或洗净后将处理杯保持在下杯位置。
43.在所述情况下,在洗净利用第2衬底保持部保持的衬底时处理杯被保持在上杯位置。由此,从衬底飞散的洗净液由处理杯接住。另一方面,在利用第2衬底保持部保持的衬底的洗净前或洗净后,处理杯被保持在下杯位置。由此,能够相对于第2衬底保持部进行水平方向的存取。因此,能够从衬底洗净装置的外部对第2衬底保持部交接衬底。
44.(18)依照本发明的进而其它方式的衬底洗净装置具备:第1衬底保持部,保持衬底的外周端部;第2衬底保持部,在第1衬底保持部下方的位置保持衬底的下表面中央区域;交接部,在第1衬底保持部与第2衬底保持部之间进行衬底的交接;洗净具,与衬底的下表面接触来洗净衬底的下表面;及洗净控制部,以衬底由第1衬底保持部保持时衬底的中心位于第1位置的状态下洗净衬底的下表面中央区域,在衬底由第2衬底保持部保持时衬底的中心位于第1位置下方的第2位置的状态下洗净包围衬底的下表面中央区域的下表面外侧区域的方式,控制洗净具。
45.在所述衬底洗净装置中,利用交接部在第1衬底保持部与第2衬底保持部之间交接衬底。在衬底由第1衬底保持部保持时,在衬底的中心位于第1位置的状态下利用洗净具洗净衬底的下表面中央区域。在衬底由第2衬底保持部保持时,在衬底的中心位于第1位置下方的第2位置的状态下利用洗净具洗净衬底的下表面外侧区域。这样,为分别洗净衬底的下表面中央区域与下表面外侧区域,无需衬底向水平方向移动。因此,能够减少占地面积的增加且洗净衬底的整个下表面。
46.(19)衬底洗净装置也可还具备:交接控制部,以将在第1衬底保持部中洗净下表面中央区域的衬底传递到第2衬底保持部的方式控制交接部。在所述情况下,能够容易洗净衬底的整个下表面。
47.(20)交接控制部也可还以将在第2衬底保持部中洗净下表面外侧区域的衬底再次传递到第1衬底保持部的方式控制交接部,洗净控制部以再次洗净利用第1衬底保持部保持的衬底的下表面中央区域的方式控制洗净具。在所述情况下,利用第2衬底保持部保持的衬底的下表面中央区域在第1衬底保持部中再次被洗净。由此,能够更适当地洗净衬底。
48.(21)衬底洗净装置也可还具备:交接控制部,以将在第2衬底保持部中洗净下表面外侧区域的衬底传递到第1衬底保持部的方式控制交接部。在所述情况下,利用第2衬底保持部保持的衬底的下表面中央区域在第1衬底保持部中被洗净。由此,能够更适当且有效地洗净衬底。
49.(22)衬底洗净装置也可构成为在第1洗净模式与第2洗净模式下选择性动作,洗净控制部在第1洗净模式下,以在衬底由第1衬底保持部保持时洗净衬底的下表面中央区域,在衬底由第2衬底保持部保持时洗净衬底的下表面外侧区域的方式,控制洗净具,在第2洗净模式下,以在衬底由第1衬底保持部保持时不洗净衬底,在衬底由第2衬底保持部保持时
洗净衬底的下表面外侧区域的方式,控制洗净具。
50.在所述情况下,能够通过使衬底洗净装置在第1洗净模式下动作,而洗净衬底的整个下表面。另一方面,在无需洗净衬底的下表面中央区域的情况下,能够通过使衬底洗净装置在第2洗净模式下动作,而有效地洗净衬底的下表面外侧区域。
51.(23)第2衬底保持部构成为能够保持衬底并旋转,衬底洗净装置也可还具备:台座部,支撑洗净具及第2衬底保持部;台座驱动部,使台座部在洗净具位于应利用第1衬底保持部保持的衬底的中心的下方的第1状态、与第2衬底保持部的旋转中心位于应利用第1衬底保持部保持的衬底的中心的下方的第2状态之间移动;及台座控制部,以洗净第1衬底保持部的衬底时台座部位于第1状态,在第1衬底保持部与第2衬底保持部之间交接衬底时台座部位于第2状态的方式,控制台座驱动部。
52.在所述情况下,能够容易在第1衬底保持部与第2衬底保持部之间交接衬底,且利用共通的洗净具容易洗净利用第1衬底保持部保持的衬底的下表面中央区域、与利用第2衬底保持部保持的衬底的下表面外侧区域。
53.(24)依照本发明的进而其它方式的衬底处理装置具备:所述衬底洗净装置;及衬底搬送部,包含构成为能够保持衬底的第1搬送保持部与构成为在第1搬送保持部下方能够保持衬底的第2搬送保持部;且第1搬送保持部对衬底洗净装置的第1衬底保持部进行衬底的交接,第2搬送保持部对衬底洗净装置的第2衬底保持部进行衬底的交接。
54.在所述情况下,在相互对应的第1搬送保持部与第1衬底保持部之间,进行衬底的交接(以下,称为第1交接)。这时,第1搬送保持部需移动到第1高度位置。
55.另外,在相互对应的第2搬送保持部与第2衬底保持部之间,进行衬底的交接(以下,称为第2交接)。这时,第2搬送保持部需移动到第2高度位置。
56.如上所述,第1及第2搬送保持部以分别对应于第1及第2衬底保持部,空出间隔上下排列的方式配置。因此,在互不相同的高度位置进行第1交接与第2交接的情况下,缩短各搬送保持部的上下方向的移动所需要的时间。因此,衬底处理装置的衬底处理的产量提高。
57.(25)依照本发明的进而其它方式的衬底洗净方法包含以下步骤:在衬底的外周端部由第1衬底保持部保持时,在衬底的中心位于第1位置的状态下利用与衬底的下表面接触的洗净具洗净衬底的下表面中央区域;在第1衬底保持部下方的位置衬底的下表面中央区域由第2衬底保持部保持时,在衬底的中心位于第1位置下方的第2位置的状态下利用洗净具洗净包围衬底的下表面中央区域的下表面外侧区域;及在第1衬底保持部与第2衬底保持部之间进行衬底的交接。
58.根据所述衬底洗净方法,为分别洗净衬底的下表面中央区域与下表面外侧区域,无需衬底向水平方向移动。因此,能够减少占地面积的增加且洗净衬底的整个下表面。
59.(26)进行衬底的交接的步骤也可包含将在第1衬底保持部中洗净下表面中央区域的衬底传递到第2衬底保持部。在所述情况下,能够容易洗净衬底的整个下表面。
60.(27)衬底洗净方法也可还包含以下步骤:将在第2衬底保持部中洗净下表面外侧区域的衬底再次传递到第1衬底保持部;及利用洗净具再次洗净从第2衬底保持部传递且利用第1衬底保持部保持的衬底的下表面中央区域。在所述情况下,利用第2衬底保持部保持的衬底的下表面中央区域在第1衬底保持部中再次被洗净。由此,能够更适当地洗净衬底。
61.(28)进行衬底的交接的步骤也可包含将在第2衬底保持部中洗净下表面外侧区域
的衬底传递到第1衬底保持部。在所述情况下,利用第2衬底保持部保持的衬底的下表面中央区域在第1衬底保持部中被洗净。由此,能够更适当且有效地洗净衬底。
62.(29)也可为洗净衬底的下表面中央区域的步骤包含在第1洗净模式下,洗净衬底的下表面中央区域,在第2洗净模式下,不洗净衬底,且洗净下表面外侧区域的步骤包含在第1及第2洗净模式下,洗净衬底的下表面外侧区域。
63.在所述情况下,在第1洗净模式下,能够洗净衬底的整个下表面。另一方面,在无需洗净衬底的下表面中央区域的情况下,在第2洗净模式下,能够有效地洗净衬底的下表面外侧区域。
64.(30)也可为洗净衬底的下表面中央区域的步骤包含将支撑洗净具及第2衬底保持部的台座部设为第1状态,洗净下表面外侧区域的步骤包含将台座部设为第2状态,第2衬底保持部构成为能够保持衬底并旋转,在第1状态下,洗净具位于应利用第1衬底保持部保持的衬底的中心的下方,在第2状态中,第2衬底保持部的旋转中心位于应利用第1衬底保持部保持的衬底的中心的下方。
65.在所述情况下,能够容易在第1衬底保持部与第2衬底保持部之间交接衬底,且利用共通的洗净具容易洗净利用第1衬底保持部保持的衬底的下表面中央区域、与利用第2衬底保持部保持的衬底的下表面外侧区域。
附图说明
66.图1是本发明的一实施方式的衬底洗净装置的示意性俯视图。
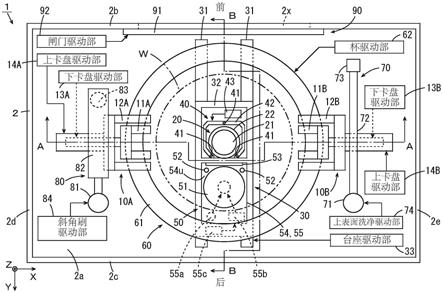
67.图2是表示图1的衬底洗净装置的内部构成的外观立体图。
68.图3是表示本发明的一实施方式的衬底洗净装置的控制系统的构成的框图。
69.图4是用来说明图1的衬底洗净装置的动作的一例的示意图。
70.图5是用来说明图1的衬底洗净装置的动作的一例的示意图。
71.图6是用来说明图1的衬底洗净装置的动作的一例的示意图。
72.图7是用来说明图1的衬底洗净装置的动作的一例的示意图。
73.图8是用来说明图1的衬底洗净装置的动作的一例的示意图。
74.图9是用来说明图1的衬底洗净装置的动作的一例的示意图。
75.图10是用来说明图1的衬底洗净装置的动作的一例的示意图。
76.图11是用来说明图1的衬底洗净装置的动作的一例的示意图。
77.图12是用来说明图1的衬底洗净装置的动作的一例的示意图。
78.图13是用来说明图1的衬底洗净装置的动作的一例的示意图。
79.图14是用来说明图1的衬底洗净装置的动作的一例的示意图。
80.图15是用来说明图1的衬底洗净装置的动作的一例的示意图。
81.图16是表示图3的控制装置的衬底洗净处理的流程图。
82.图17是表示第1变化例的衬底洗净处理的流程图。
83.图18是表示第2变化例的衬底洗净处理的流程图。
84.图19是表示具备图1的衬底洗净装置的衬底处理装置的一例的示意性俯视图。
85.图20是用来说明图16的主机器人对衬底洗净装置搬入及搬出衬底的具体例的图。
86.图21是用来说明气体喷出部的其它构成例的图。
87.图22是用来说明气体喷出部的进而其它构成例的图。
具体实施方式
88.以下,使用附图对本发明的实施方式的衬底洗净装置、衬底处理装置及衬底洗净方法进行说明。在以下的说明中,衬底意指半导体衬底(晶圆)、液晶显示装置或有机el(electro luminescence)显示装置等fpd(flat panel display)用衬底、光盘用衬底、磁盘用衬底、光磁盘用衬底、光掩模用衬底、陶瓷衬底或太阳能电池用衬底等。另外,在本实施方式中,衬底的上表面为电路形成面(表面),衬底的下表面为与电路形成面成相反侧的面(背面)。另外,在本实施方式中,衬底除凹口外具有圆形状。
89.[1]衬底洗净装置的构成
[0090]
图1是本发明的一实施方式的衬底洗净装置的示意性俯视图,图2是表示图1的衬底洗净装置1的内部构成的外观立体图。在本实施方式的衬底洗净装置1中,为明确位置关系而定义相互正交的x方向、y方向及z方向。在图1及图2以后的特定的图中,适当以箭头表示x方向、y方向及z方向。x方向及y方向在水平面内相互正交,z方向相当于铅直方向。
[0091]
如图1所示,衬底洗净装置1具备上侧保持装置10a、10b、下侧保持装置20、台座装置30、交接装置40、下表面洗净装置50、杯装置60、上表面洗净装置70、端部洗净装置80及开关装置90。所述构成要件设置在单元框体2内。在图2中,以虚线表示单元框体2。
[0092]
单元框体2具有矩形的底面部2a、与从底面部2a的4边向上方延伸的4个侧壁部2b、2c、2d、2e。侧壁部2b、2c相互对向,侧壁部2d、2e相互对向。在侧壁部2b的中央部,形成着矩形的开口。所述开口为衬底w的搬入搬出口2x,且用于衬底w对单元框体2的搬入时及搬出时。在图2中,以较粗的虚线表示搬入搬出口2x。在以下的说明中,将y方向中从单元框体2的内部通过搬入搬出口2x面向单元框体2的外部的方向(从侧壁部2c面向侧壁部2b的方向)称为前方,将它的反方向(从侧壁部2b面向侧壁部2c的方向)称为后方。
[0093]
在侧壁部2b的搬入搬出口2x的形成部分及其附近的区域,设置着开关装置90。开关装置90包含构成为能够开关搬入搬出口2x的闸门91、与驱动闸门91的闸门驱动部92。在图2中,以较粗的双点划线表示闸门91。闸门驱动部92以在衬底w对衬底洗净装置1搬入时及搬出时开放搬入搬出口2x的方式驱动闸门91。另外,闸门驱动部92以在衬底洗净装置1的衬底w的洗净处理时闭塞搬入搬出口2x的方式驱动闸门91。
[0094]
在底面部2a的中央部,设置着台座装置30。台座装置30包含线性导轨31、可动台座32及台座驱动部33。线性导轨31包含2条轨道,以俯视下沿y方向从侧壁部2b附近延伸到侧壁部2c附近的方式设置。可动台座32设置为能够在线性导轨31的2条轨道上沿y方向移动。台座驱动部33包含例如脉冲电动机,使可动台座32沿y方向在线性导轨31上移动。
[0095]
在可动台座32上,下侧保持装置20及下表面洗净装置50以排列于y方向的方式设置。下侧保持装置20包含吸附保持部21及吸附保持驱动部22。吸附保持部21为所谓旋转卡盘,具有能够吸附保持衬底w的下表面的圆形的吸附面,且构成为能够绕在上下方向延伸的轴(z方向的轴)旋转。在图1中,以双点划线表示利用下侧保持装置20吸附保持的衬底w的外形。在以下的说明中,在利用吸附保持部21吸附保持衬底w时,将衬底w的下表面中吸附保持部21的吸附面应吸附的区域称为下表面中央区域。另一方面,将衬底w的下表面中包围下表面中央区域的区域称为下表面外侧区域。此外,下表面中央区域相当于本发明的下表面中
央部及下表面中央区域。
[0096]
吸附保持驱动部22包含电动机。吸附保持驱动部22的电动机以旋转轴向上方突出的方式设置在可动台座32上。吸附保持部21安装于吸附保持驱动部22的旋转轴的上端部。另外,在吸附保持驱动部22的旋转轴,形成着用来在吸附保持部21中吸附保持衬底w的吸引路径。所述吸引路径连接于无图示的吸气装置。吸附保持驱动部22使吸附保持部21绕所述旋转轴旋转。
[0097]
在可动台座32上,在下侧保持装置20的附近还设置着交接装置40。交接装置40包含多个(在本例中为3个)支撑销41、销连结部件42及销升降驱动部43。销连结部件42以俯视下包围吸附保持部21的方式形成,连结多个支撑销41。多个支撑销41在利用销连结部件42相互连结的状态下,从销连结部件42向上方延伸一定长度。销升降驱动部43使销连结部件42在可动台座32上升降。由此,多个支撑销41相对于吸附保持部21相对升降。
[0098]
下表面洗净装置50包含下表面刷51、2个液体喷嘴52、气体喷出部53、升降支撑部54、移动支撑部55、下表面刷旋转驱动部55a、下表面刷升降驱动部55b及下表面刷移动驱动部55c。移动支撑部55设置为在可动台座32上的一定区域内能够相对于下侧保持装置20在y方向移动。如图2所示,在移动支撑部55上,能够升降地设置着升降支撑部54。升降支撑部54具有在远离吸附保持部21的方向(在本例中为后方)上向斜下方倾斜的上表面54u。
[0099]
如图1所示,下表面刷51由例如pva(聚乙烯醇)海绵或分散着磨粒的pva海绵形成,具有能够与衬底w的下表面接触的圆形的洗净面。另外,下表面刷51以洗净面面向上方且洗净面能够绕通过所述洗净面的中心在上下方向延伸的轴旋转的方式,安装于升降支撑部54的上表面54u。下表面刷51的洗净面的面积大于吸附保持部21的吸附面的面积。
[0100]
2个液体喷嘴52的每一个以位于下表面刷51附近且液体喷出口面向上方的方式,安装于升降支撑部54的上表面54u上。在液体喷嘴52,连接着下表面洗净液供给部56(图3)。下表面洗净液供给部56对液体喷嘴52供给洗净液。液体喷嘴52在利用下表面刷51洗净衬底w时,将从下表面洗净液供给部56供给的洗净液供给到衬底w的下表面。在本实施方式中,使用净水(去离子水)作为供给到液体喷嘴52的洗净液。此外,作为供给到液体喷嘴52的洗净液,也能够代替净水,使用碳酸水、臭氧水、氢水、电解离子水、sc1(氨与过氧化氢水的混合溶液)或tmah(氢氧化四甲基铵)。
[0101]
气体喷出部53为具有在一方向延伸的气体喷出口的缝隙状气体喷射喷嘴。气体喷出部53以俯视下位于下表面刷51与吸附保持部21之间且气体喷射口面向上方的方式,安装于升降支撑部54的上表面54u。在气体喷出部53,连接着喷出气体供给部57(图3)。喷出气体供给部57对气体喷出部53供给气体。在本实施方式中,使用氮气作为供给到气体喷出部53的气体。气体喷出部53在利用下表面刷51洗净衬底w时及稍后叙述的干燥衬底w的下表面时,将从喷出气体供给部57供给的气体喷射到衬底w的下表面。在所述情况下,在下表面刷51与吸附保持部21之间,形成在x方向延伸的带状气体幕。作为供给到气体喷出部53的气体,也能够代替氮气,使用氩气或氦气等惰性气体。
[0102]
下表面刷旋转驱动部55a包含电动机,在利用下表面刷51洗净衬底w时使下表面刷51旋转。下表面刷升降驱动部55b包含步进电动机或气缸,使升降支撑部54相对于移动支撑部55升降。下表面刷移动驱动部55c包含电动机,使移动支撑部55在可动台座32上沿y方向移动。这里,可动台座32的下侧保持装置20的位置固定。因此,在利用下表面刷移动驱动部
55c将移动支撑部55在y方向移动时,移动支撑部55相对于下侧保持装置20相对移动。在以下的说明中,将可动台座32上最接近下侧保持装置20时的下表面洗净装置50的位置称为接近位置,将可动台座32上距下侧保持装置20最远时的下表面洗净装置50的位置称为分开位置。
[0103]
在底面部2a的中央部,还设置着杯装置60。杯装置60包含处理杯61及杯驱动部62。处理杯61设置为俯视下包围下侧保持装置20及台座装置30且能够升降。在图2中,以虚线表示处理杯61。杯驱动部62根据下表面刷51洗净衬底w的下表面中的哪一部分来使处理杯61在下杯位置与上杯位置之间移动。下杯位置是处理杯61的上端部位于利用吸附保持部21吸附保持的衬底w下方的高度位置。另外,上杯位置是处理杯61的上端部位于吸附保持部21上方的高度位置。
[0104]
在处理杯61上方的高度位置,以俯视下夹着台座装置30对向的方式设置着一对上侧保持装置10a、10b。上侧保持装置10a包含下卡盘11a、上卡盘12a、下卡盘驱动部13a及上卡盘驱动部14a。上侧保持装置10b包含下卡盘11b、上卡盘12b、下卡盘驱动部13b及上卡盘驱动部14b。
[0105]
下卡盘11a、11b俯视下关于通过吸附保持部21的中心在y方向(前后方向)延伸的铅直面对称配置,在共通的水平面内能够在x方向上移动地设置。下卡盘11a、11b的每一个具有能够从衬底w的下方支撑衬底w的下表面周缘部的2个支撑片。下卡盘驱动部13a、13b以下卡盘11a、11b相互接近的方式,或下卡盘11a、11b相互远离的方式,使下卡盘11a、11b移动。
[0106]
上卡盘12a、12b与下卡盘11a、11b同样,俯视下关于通过吸附保持部21的中心在y方向(前后方向)延伸的铅直面对称配置,在共通的水平面内能够在x方向上移动地设置。上卡盘12a、12b的每一个具有构成为与衬底w的外周端部的2个部分抵接并能够保持衬底w的外周端部的2个保持片。上卡盘驱动部14a、14b以上卡盘12a、12b相互接近的方式,或上卡盘12a、12b相互远离的方式,使上卡盘12a、12b移动。
[0107]
如图1所示,在处理杯61的一侧,以俯视下位于上侧保持装置10b附近的方式,设置着上表面洗净装置70。上表面洗净装置70包含旋转支撑轴71、臂72、喷雾喷嘴73及上表面洗净驱动部74。
[0108]
旋转支撑轴71以在上下方向延伸的方式且能够升降并旋转地由上表面洗净驱动部74支撑在底面部2a上。如图2所示,臂72在上侧保持装置10b上方的位置,以从旋转支撑轴71的上端部向水平方向延伸的方式设置。在臂72的前端部,安装着喷雾喷嘴73。
[0109]
在喷雾喷嘴73,连接上表面洗净流体供给部75(图3)。上表面洗净流体供给部75对喷雾喷嘴73供给洗净液及气体。在本实施方式中,使用净水作为供给到喷雾喷嘴73的洗净液,使用氮气作为供给到喷雾喷嘴73的气体。喷雾喷嘴73在洗净衬底w的上表面时,将从上表面洗净流体供给部75供给的洗净液与气体混合来生成混合流体,将生成的混合流体向下方喷射。
[0110]
此外,作为供给到喷雾喷嘴73的洗净液,也能够代替净水,使用碳酸水、臭氧水、氢水、电解离子水、sc1(氨与过氧化氢水的混合溶液)或tmah(氢氧化四甲基铵)等。另外,作为供给到喷雾喷嘴73的气体,也能够代替氮气使用氩气或氦气等惰性气体。
[0111]
上表面洗净驱动部74包含1个或多个脉冲电动机及气缸等,使旋转支撑轴71升降,
且使旋转支撑轴71旋转。根据所述构成,能够通过使喷雾喷嘴73在利用吸附保持部21吸附保持并旋转的衬底w的上表面上以圆弧状移动,而洗净衬底w的整个上表面。
[0112]
如图1所示,在处理杯61的另一侧,以俯视下位于上侧保持装置10a附近的方式,设置着端部洗净装置80。端部洗净装置80包含旋转支撑轴81、臂82、斜角刷83及斜角刷驱动部84。
[0113]
旋转支撑轴81以在上下方向延伸的方式且能够升降并旋转地由斜角刷驱动部84支撑在底面部2a上。如图2所示,臂82在上侧保持装置10a上方的位置,以从旋转支撑轴81的上端部向水平方向延伸的方式设置。在臂82的前端部,以向下方突出且能够绕上下方向的轴旋转的方式设置着斜角刷83。
[0114]
斜角刷83由例如pva海绵或分散着磨粒的pva海绵形成,上半部具有倒圆锥台形状且下半部具有圆锥台形状。根据所述斜角刷83,能够在外周面的上下方向的中央部分洗净衬底w的外周端部。
[0115]
斜角刷驱动部84包含1个或多个脉冲电动机及气缸等,使旋转支撑轴81升降,且使旋转支撑轴81旋转。根据所述构成,能够通过使斜角刷83的外周面的中央部分接触利用吸附保持部21吸附保持并旋转的衬底w的外周端部,而洗净衬底w的整个外周端部。
[0116]
这里,斜角刷驱动部84还包含内置在臂82的电动机。所述电动机使设置在臂82的前端部的斜角刷83绕上下方向的轴旋转。因此,在洗净衬底w的外周端部时,通过斜角刷83旋转,衬底w的外周端部的斜角刷83的洗净力提高。
[0117]
图3是表示本发明的一实施方式的衬底洗净装置1的控制系统的构成的框图。图3的控制装置9包含cpu(central processing unit:中央运算处理装置)、ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)及存储装置。ram作为cpu的作业区域使用。rom存储系统程序。存储装置存储控制程序。
[0118]
如图3所示,控制装置9包含卡盘控制部9a、吸附控制部9b、台座控制部9c、交接控制部9d、下表面洗净控制部9e、杯控制部9f、上表面洗净控制部9g、斜角洗净控制部9h及搬入搬出控制部9i作为功能部。通过cpu在ram上执行存储在存储装置的衬底洗净程序而实现控制装置9的功能部。控制装置9的功能部的一部分或全部也可利用电子电路等硬件实现。
[0119]
如图3所示,卡盘控制部9a为接受搬入到衬底洗净装置1的衬底w,并保持在吸附保持部21上方的位置,而控制下卡盘驱动部13a、13b及上卡盘驱动部14a、14b。另外,吸附控制部9b为利用吸附保持部21吸附保持衬底w且使吸附保持的衬底w旋转,而控制吸附保持驱动部22。
[0120]
台座控制部9c为使可动台座32相对于利用上侧保持装置10a、10b保持的衬底w移动,而控制台座驱动部33。交接控制部9d为使衬底w在利用上侧保持装置10a、10b保持的衬底w的高度位置、与利用吸附保持部21保持的衬底w的高度位置之间移动,而控制销升降驱动部43。
[0121]
下表面洗净控制部9e为洗净衬底w的下表面,而控制下表面刷旋转驱动部55a、下表面刷升降驱动部55b、下表面刷移动驱动部55c、下表面洗净液供给部56及喷出气体供给部57。杯控制部9f为在洗净利用吸附保持部21吸附保持的衬底w时由处理杯61接住从衬底w飞散的洗净液,而控制杯驱动部62。
[0122]
上表面洗净控制部9g为洗净利用吸附保持部21吸附保持的衬底w的上表面,而控
制上表面洗净驱动部74及上表面洗净流体供给部75。斜角洗净控制部9h为洗净利用吸附保持部21吸附保持的衬底w的外周端部,而控制斜角刷驱动部84。搬入搬出控制部9i为在衬底洗净装置1的衬底w的搬入时及搬出时开关单元框体2的搬入搬出口2x,而控制闸门驱动部92。
[0123]
[2]衬底洗净装置1的动作
[0124]
图4~图15是用来说明图1的衬底洗净装置1的动作的一例的示意图。在图4~图15的每张图中,上段表示衬底洗净装置1的俯视图。另外,中段表示沿y方向观察的下侧保持装置20及它的周边部的侧视图,下段表示沿x方向观察的下侧保持装置20及它的周边部的侧视图。中段的侧视图对应于图1的a-a线侧视图,下段的侧视图对应于图1的b-b线侧视图。此外,为容易理解衬底洗净装置1的各构成要件的形状及动作状态,而在上段的俯视图与中段及下段的侧视图之间,一部分构成要件的扩缩率不同。另外,在图4~图15中,处理杯61以双点划线表示,且衬底w的外形以较粗的一点划线表示。
[0125]
在对衬底洗净装置1搬入衬底w之前的初始状态下,开关装置90的闸门91闭塞搬入搬出口2x。另外,如图1所示,下卡盘11a、11b维持下卡盘11a、11b间的距离充分大于衬底w的直径的状态。另外,上卡盘12a、12b也维持上卡盘12a、12b间的距离充分大于衬底w的直径的状态。另外,台座装置30的可动台座32以俯视下吸附保持部21的中心位于处理杯61的中心的方式配置。另外,下表面洗净装置50在可动台座32上配置在接近位置。另外,下表面洗净装置50的升降支撑部54处于下表面刷51的洗净面(上端部)位于吸附保持部21下方的状态。另外,交接装置40处于多个支撑销41位于吸附保持部21下方的状态。再者,在杯装置60中,处理杯61处于下杯位置。在以下的说明中,将俯视下处理杯61的中心位置称为平面基准位置rp。另外,将俯视下吸附保持部21的中心位于平面基准位置rp时的底面部2a上的可动台座32的位置称为第1水平位置。
[0126]
对衬底洗净装置1的单元框体2内搬入衬底w。具体来说,在即将搬入衬底w之前闸门91开放搬入搬出口2x。之后,如图4中较粗的实线箭头a1所示,无图示的衬底搬送机器人的手(衬底保持部)rh通过搬入搬出口2x将衬底w搬入到单元框体2内的大致中央的位置。这时,利用手rh保持的衬底w如图4所示,位于下卡盘11a及上卡盘12a与下卡盘11b及上卡盘12b之间。
[0127]
接下来,如图5中较粗的实线箭头a2所示,以下卡盘11a、11b的多个支撑片位于衬底w的下表面周缘部的下方的方式,下卡盘11a、11b相互接近。在所述状态下,手rh下降,从搬入搬出口2x退出。由此,手rh所保持的衬底w的下表面周缘部的多个部分由下卡盘11a、11b的多个支撑片支撑。在手rh退出后,闸门91闭塞搬入搬出口2x。
[0128]
接下来,如图6中较粗的实线箭头a3所示,以上卡盘12a、12b的多个保持片与衬底w的外周端部抵接的方式,上卡盘12a、12b相互接近。通过上卡盘12a、12b的多个保持片与衬底w的外周端部的多个部分抵接,利用下卡盘11a、11b支撑的衬底w还由上卡盘12a、12b保持。这样,利用上侧保持装置10a、10b保持的衬底w的中心在俯视下与平面基准位置rp重叠或大致重叠。这时,如图6中段的侧视图所示,利用上卡盘12a、12b保持的衬底w的高度位置相当于本发明的第1高度位置。另外,如图6中较粗的实线箭头a4所示,以吸附保持部21距平面基准位置rp偏离特定距离且下表面刷51的中心位于平面基准位置rp的方式,可动台座32从第1水平位置向前方移动。这时,将位于底面部2a上的可动台座32的位置称为第2水平位
置。
[0129]
接下来,如图7中较粗的实线箭头a5所示,以下表面刷51的洗净面与衬底w的下表面中央区域接触的方式,升降支撑部54上升。另外,如图7中较粗的实线箭头a6所示,下表面刷51绕上下方向的轴旋转(自转)。由此,利用下表面刷51将附着在衬底w的下表面中央区域的污染物质物理剥离。如图7下段的侧视图所示,与利用上侧保持装置10a、10b保持的衬底w的下表面接触时的下表面刷51的高度位置相当于本发明的第1洗净高度位置。
[0130]
在图7的下段,在对白框内表示下表面刷51与衬底w的下表面接触的部分的放大侧视图。如所述对白框内所示,在下表面刷51与衬底w接触的状态下,液体喷嘴52及气体喷出部53被保持在接近衬底w的下表面的位置。这时,液体喷嘴52如白色的箭头a51所示,在下表面刷51附近的位置向衬底w的下表面喷出洗净液。由此,通过将从液体喷嘴52供给到衬底w的下表面的洗净液导向下表面刷51与衬底w的接触部,而利用洗净液冲洗利用下表面刷51从衬底w的背面去除的污染物质。这样,在下表面洗净装置50中,将液体喷嘴52与下表面刷51一起安装于升降支撑部54。由此,能够对利用下表面刷51洗净衬底w的下表面的部分有效地供给洗净液。因此,减少洗净液的消耗量且抑制洗净液的过度飞散。
[0131]
此外,洗净衬底w的下表面时的下表面刷51的旋转速度维持在从液体喷嘴52供给到衬底w的下表面的洗净液不飞散到下表面刷51的侧方的程度的速度。
[0132]
这里,升降支撑部54的上表面54u在远离吸附保持部21的方向上向斜下方倾斜。在所述情况下,在包含污染物质的洗净液从衬底w的下表面落下到升降支撑部54上的情况下,将利用上表面54u接住的洗净液导向远离吸附保持部21的方向。
[0133]
另外,在利用下表面刷51洗净衬底w的下表面时,气体喷出部53如图7的对白框内白色的箭头a52所示,在下表面刷51与吸附保持部21之间的位置向衬底w的下表面喷射气体。在本实施方式中,气体喷出部53以气体喷射口在x方向延伸的方式安装于升降支撑部54上。在所述情况下,从气体喷出部53对衬底w的下表面喷射气体时,在下表面刷51与吸附保持部21之间形成在x方向延伸的带状气体幕。由此,在利用下表面刷51洗净衬底w的下表面时,防止包含污染物质的洗净液向吸附保持部21飞散。因此,在利用下表面刷51洗净衬底w的下表面时,防止包含污染物质的洗净液附着在吸附保持部21,而将吸附保持部21的吸附面保持清洁。
[0134]
此外,在图7的例子中,气体喷出部53如白色的箭头a52所示,从气体喷出部53向下表面刷51斜上方喷射气体,但本发明不限定于所述。气体喷出部53也可沿z方向从气体喷出部53向衬底w的下表面喷射气体。
[0135]
接下来,在图7的状态下,如果衬底w的下表面中央区域的洗净完成,那么停止下表面刷51的旋转,以下表面刷51的洗净面距衬底w分开特定距离(大于0mm且10mm以下,例如5mm左右)的方式,升降支撑部54下降。另外,停止从液体喷嘴52向衬底w喷出洗净液。这时,继续从气体喷出部53向衬底w喷射气体。
[0136]
之后,如图8中较粗的实线箭头a7所示,以吸附保持部21位于平面基准位置rp的方式,可动台座32向后方移动。也就是说,可动台座32从第2水平位置移动到第1水平位置。这时,通过继续从气体喷出部53向衬底w喷射气体,衬底w的下表面中央区域由气体幕依次干燥。
[0137]
接下来,如图9中较粗的实线箭头a8所示,以下表面刷51的洗净面位于吸附保持部
21的吸附面(上端部)下方的方式,升降支撑部54下降。另外,如图9中较粗的实线箭头a9所示,以上卡盘12a、12b的多个保持片从衬底w的外周端部分开的方式,上卡盘12a、12b相互远离。这时,衬底w成为由下卡盘11a、11b支撑的状态。
[0138]
之后,如图9中较粗的实线箭头a10所示,以多个支撑销41的上端部位于下卡盘11a、11b稍微上方的方式,销连结部件42上升。由此,利用下卡盘11a、11b支撑的衬底w由多个支撑销41接受。
[0139]
接下来,如图10中较粗的实线箭头a11所示,下卡盘11a、11b相互远离。这时,下卡盘11a、11b移动到俯视下不与利用多个支撑销41支撑的衬底w重叠的位置。由此,上侧保持装置10a、10b都返回到初始状态。
[0140]
接下来,如图11中较粗的实线箭头a12所示,以多个支撑销41的上端部位于吸附保持部21下方的方式,销连结部件42下降。由此,多个支撑销41上所支撑的衬底w由吸附保持部21接受。在所述状态下,吸附保持部21吸附保持衬底w的下表面中央区域。这样,利用下侧保持装置20吸附保持的衬底w的中心在俯视下与平面基准位置rp重叠或大致重叠。这时,如图11中段及下段的侧视图所示,利用吸附保持部21吸附保持的衬底w的高度位置相当于本发明的第2高度位置。在与销连结部件42的下降同时或销连结部件42的下降完成后,如图11中较粗的实线箭头a13所示,处理杯61从下杯位置上升到上杯位置。由此,处于第2高度位置的衬底w位于处理杯61的上端部下方。
[0141]
接下来,如图12中较粗的实线箭头a14所示,吸附保持部21绕上下方向的轴(吸附保持驱动部22的旋转轴的轴心)旋转。由此,吸附保持于吸附保持部21的衬底w以水平姿势旋转。
[0142]
接下来,上表面洗净装置70的旋转支撑轴71旋转、下降。由此,如图12中较粗的实线箭头a15所示,喷雾喷嘴73移动到衬底w上方的位置,以喷雾喷嘴73与衬底w之间的距离成为预定距离的方式下降。在所述状态下,喷雾喷嘴73对衬底w的上表面喷射洗净液与气体的混合流体。另外,旋转支撑轴71旋转。由此,如图12中较粗的实线箭头a16所示,喷雾喷嘴73在旋转的衬底w上方的位置移动。通过对衬底w的整个上表面喷射混合流体,洗净衬底w的整个上表面。
[0143]
另外,在利用喷雾喷嘴73洗净衬底w的上表面时,端部洗净装置80的旋转支撑轴81也旋转、下降。由此,如图12中较粗的实线箭头a17所示,斜角刷83移动到衬底w的外周端部上方的位置。另外,斜角刷83的外周面的中央部分以与衬底w的外周端部接触的方式下降。在所述状态下,斜角刷83绕上下方向的轴旋转(自转)。由此,利用斜角刷83将附着在衬底w的外周端部的污染物质物理剥离。从衬底w的外周端部剥离的污染物质由从喷雾喷嘴73喷射到衬底w的混合流体的洗净液冲洗。
[0144]
再者,在利用喷雾喷嘴73洗净衬底w的上表面时,以下表面刷51的洗净面与衬底w的下表面外侧区域接触的方式,升降支撑部54上升。另外,如图12中较粗的实线箭头a18所示,下表面刷51绕上下方向的轴旋转(自转)。再者,液体喷嘴52向衬底w的下表面喷出洗净液,气体喷出部53向衬底w的下表面喷射气体。在所述状态下,进一步如图12中较粗的实线箭头a19所示,移动支撑部55在可动台座32上在接近位置与分开位置之间进行进退动作。这样,通过利用移动支撑部55将下表面刷51以与衬底w的下表面接触的状态在水平方向移动,而扩大利用下表面刷51能够洗净衬底w的下表面的范围。由此,利用吸附保持部21吸附保持
并旋转的衬底w的下表面外侧区域整个由下表面刷51洗净。如图12下段的侧视图所示,与利用下侧保持装置20吸附保持的衬底w的下表面接触时的下表面刷51的高度位置相当于本发明的第2洗净高度位置。
[0145]
接下来,如果衬底w的上表面、外周端部及下表面外侧区域的洗净完成,那么停止从喷雾喷嘴73向衬底w喷射混合流体。另外,如图13中较粗的实线箭头a20所示,喷雾喷嘴73移动到处理杯61的一侧的位置(初始状态的位置)。另外,如图13中较粗的实线箭头a21所示,斜角刷83移动到处理杯61的另一侧的位置(初始状态的位置)。再者,停止下表面刷51的旋转,以下表面刷51的洗净面距衬底w分开特定距离的方式,升降支撑部54下降。另外,停止从液体喷嘴52向衬底w喷出洗净液、及从气体喷出部53向衬底w喷射气体。在所述状态下,通过吸附保持部21高速旋转,而甩掉附着在衬底w的洗净液,将整个衬底w进行干燥。
[0146]
接下来,如图14中较粗的实线箭头a22所示,处理杯61从上杯位置下降到下杯位置。由此,位于第2高度位置的衬底w位于处理杯61的上端部上方。另外,准备将新的衬底w搬入单元框体2内,如图14中较粗的实线箭头a23所示,下卡盘11a、11b相互接近到能够支撑新的衬底w的位置。
[0147]
最后,从衬底洗净装置1的单元框体2内搬出衬底w。具体来说,在即将搬出衬底w之前闸门91开放搬入搬出口2x。之后,如图15中较粗的实线箭头a24所示,无图示的衬底搬送机器人的手(衬底保持部)rh通过搬入搬出口2x进入单元框体2内。接下来,手rh接受吸附保持部21上的衬底w,并从搬入搬出口2x退出。在手rh退出后,闸门91闭塞搬入搬出口2x。
[0148]
[3]衬底洗净装置1的效果
[0149]
(1)在本实施方式的衬底洗净装置1中,在利用上侧保持装置10a、10b保持衬底w的外周端部的状态下,可动台座32移动到第2水平位置。在可动台座32处于第2水平位置的状态下,吸附保持部21与衬底w的下表面外侧区域对向且下表面刷51与衬底w的下表面中央区域对向。在所述情况下,升降支撑部54以使下表面刷51与衬底w的下表面接触的方式升降。由此,利用上侧保持装置10a、10b保持的衬底w的下表面中央区域由下表面刷51洗净。
[0150]
另一方面,在利用上侧保持装置10a、10b保持衬底w的外周端部的状态下,可动台座32移动到第1水平位置。在可动台座32处于第1水平位置的状态下,吸附保持部21与衬底w的下表面中央区域对向且下表面刷51与衬底w的下表面外侧区域对向。在所述情况下,通过交接装置40使衬底w在吸附保持部21上移动,而无需水平方向的衬底w的移动,能够利用吸附保持部21吸附保持衬底w的下表面中央区域。在使利用吸附保持部21吸附保持的衬底w旋转的状态下,升降支撑部54以使下表面刷51与衬底w的下表面接触的方式升降。由此,利用吸附保持部21吸附保持的衬底w的下表面外侧区域由下表面刷51洗净。
[0151]
这样,根据本实施方式的衬底洗净装置1,为分别洗净衬底w的下表面中央区域与下表面外侧区域,无需衬底w向水平方向移动。因此,能够减少占地面积的增加且洗净衬底w的整个下表面。
[0152]
(2)在本实施方式的衬底洗净装置1中,在衬底w由上侧保持装置10a、10b保持的状态下,通过升降支撑部54使下表面刷51升降,下表面刷51与衬底w的下表面接触。在所述状态下,下表面刷51旋转,对衬底w的下表面供给洗净液。
[0153]
这里,利用上侧保持装置10a、10b保持的衬底w的高度位置高于处理杯61的上端部。即使在这样的情况下,因为在衬底w由上侧保持装置10a、10b保持的状态下,衬底w不旋
转,所以供给到衬底w的洗净液也不易飞散到衬底w的外部。由此,能够防止上侧保持装置10a、10b与处理杯61的干扰,且减少洗净液的飞散并由下表面刷51洗净衬底w的下表面中央区域。
[0154]
另一方面,在衬底w由吸附保持部21吸附保持的状态下,通过升降支撑部54使下表面刷51升降,下表面刷51与衬底w的下表面接触。在所述状态下,衬底w还与吸附保持部21一起旋转,对衬底w的下表面供给洗净液。
[0155]
这里,在利用下表面刷51洗净衬底w的下表面中央区域时利用吸附保持部21吸附保持的衬底w的高度位置低于处理杯61的上端部。因此,供给到利用吸附保持部21旋转的衬底w的下表面并飞散到衬底w的外部的洗净液由处理杯61接住。因此,能够抑制飞散的洗净液所致的清洁度降低,且由下表面刷51洗净利用吸附保持部21吸附保持的衬底w的下表面外侧区域。
[0156]
在上侧保持装置10a、10b与吸附保持部21之间,通过交接装置40使衬底w沿z方向升降而进行衬底w的交接。由此,处于由上侧保持装置10a、10b保持的状态时的衬底w、与处于由下侧保持装置20保持的状态时的衬底w在俯视下大部分重叠。这样,在衬底洗净装置1中,为分别洗净衬底w的下表面中央区域与下表面外侧区域,无需衬底w向水平方向移动。另外,在洗净衬底w的下表面中央区域及下表面外侧区域时,减少供给到衬底w的下表面的洗净液飞散到衬底w的外部。所述的结果,能够减少占地面积的增加且洗净衬底w的整个下表面并且能够将清洁度维持得较高。
[0157]
(3)如上所述,在本实施方式的衬底洗净装置1中,下表面刷51的洗净面的面积大于吸附保持部21的吸附面的面积。
[0158]
在所述情况下,在可动台座32位于第1水平位置的状态下,能够以覆盖衬底w的下表面中吸附保持部21吸附保持的部分的方式使下表面刷51与衬底w的下表面接触。由此,能够不使下表面刷51在水平方向移动,洗净利用吸附保持部21吸附保持的衬底w的部分。
[0159]
(4)在本实施形态之衬底洗净装置1中,升降支撑部54在可动台座32上相对于下侧保持装置20相对移动。由此,即使在与衬底w的下表面接触的下表面刷51的接触面积与衬底w的下表面外侧区域相比较小的情况下,也能够通过使升降支撑部54在可动台座32上在水平方向移动,而广范围洗净衬底w的下表面。
[0160]
[4]衬底洗净处理
[0161]
图16是表示图3的控制装置9的衬底洗净处理的流程图。图16的衬底洗净处理通过控制装置9的cpu在ram上执行存储在存储装置的衬底洗净程序而进行。以下,使用图3的控制装置9、图4~图15的衬底洗净装置1及图16的流程图说明衬底洗净处理。
[0162]
首先,搬入搬出控制部9i通过控制闸门驱动部92,将衬底w搬入到单元框体2内(图4、图5及步骤s1)。接下来,卡盘控制部9a通过控制下卡盘驱动部13a、13b及上卡盘驱动部14a、14b,利用上侧保持装置10a、10b保持衬底w(图5、图6及步骤s2)。
[0163]
接下来,台座控制部9c通过控制台座驱动部33,使可动台座32从第1水平位置移动到第2水平位置(图6及步骤s3)。这时,利用上侧保持装置10a、10b保持的衬底w的中心处于第1位置,下表面刷51的中心处于第1位置的下方。之后,下表面洗净控制部9e通过控制下表面刷旋转驱动部55a、下表面刷升降驱动部55b、下表面刷移动驱动部55c、下表面洗净液供给部56及喷出气体供给部57,在衬底w的中心处于第1位置的状态下洗净衬底w的下表面中
央区域(图7及步骤s4)。
[0164]
接下来,下表面洗净控制部9e通过控制喷出气体供给部57,使衬底w干燥(图8及步骤s5)。此外,台座控制部9c通过控制台座驱动部33,使可动台座32从第2水平位置移动到第1水平位置(图8及步骤s6)。这时,下侧保持装置20的吸附保持部21的旋转中心位于第1位置的下方。在本例中,几乎同时执行步骤s5、s6。由此,依次干燥衬底w的下表面中央区域。
[0165]
接下来,通过卡盘控制部9a控制下卡盘驱动部13a、13b及上卡盘驱动部14a、14b,且交接控制部9d控制销升降驱动部43,将衬底w从上侧保持装置10a、10b交接到下侧保持装置20(图8~图11及步骤s7)。这时,衬底w的中心位于第1位置下方的第2位置。在所述状态下,吸附控制部9b通过以吸附衬底w的下表面中央区域的方式控制吸附保持驱动部22,而利用下侧保持装置20保持衬底w(图11及步骤s8)。
[0166]
之后,上表面洗净控制部9g通过控制上表面洗净驱动部74及上表面洗净流体供给部75,来洗净衬底w的整个上表面(图12及步骤s9)。另外,斜角洗净控制部9h通过控制斜角刷驱动部84,来洗净衬底w的外周端部(图12及步骤s10)。再者,下表面洗净控制部9e通过控制下表面刷旋转驱动部55a、下表面刷升降驱动部55b、下表面刷移动驱动部55c、下表面洗净液供给部56及喷出气体供给部57,而在衬底w的中心处于第2位置的状态下洗净衬底w的下表面外侧区域(图12及步骤s11)。
[0167]
几乎同时执行步骤s9~s11。在执行步骤s9~s11时,吸附控制部9b通过控制吸附保持驱动部22,而使衬底w绕吸附保持驱动部22的旋转轴的轴心旋转。另外,杯控制部9f通过控制杯驱动部62,而使杯61从下杯位置上升到上杯位置。
[0168]
洗净结束后,吸附控制部9b通过控制吸附保持驱动部22使吸附保持部21高速旋转,而使整个衬底w干燥(图13及步骤s12)。在洗净结束后,干燥后,上侧保持装置10a、10b及杯61等回到初始状态(图14)。最后,搬入搬出控制部9i通过控制闸门驱动部92,而从单元框体2内搬出衬底w(图15及步骤s13),结束衬底洗净处理。
[0169]
[5]衬底洗净处理的效果
[0170]
在本实施方式的衬底洗净装置1中,利用交接装置40将衬底w在上侧保持装置10a、10b与下侧保持装置20之间交接。在衬底w由上侧保持装置10a、10b保持时,在衬底w的中心位于第1位置的状态下利用下表面刷51洗净衬底w的下表面中央区域。在利用下侧保持装置20保持衬底w时,在衬底w的中心位于第1位置下方的第2位置的状态下利用下表面刷51洗净衬底w的下表面外侧区域。
[0171]
根据所述构成,为分别洗净衬底w的下表面中央区域与下表面外侧区域,无需衬底w向水平方向移动。因此,能够减少占地面积的增加且容易洗净衬底w的整个下表面。
[0172]
另外,以在洗净上侧保持装置10a、10b的衬底w时可动台座32处于第1状态,在上侧保持装置10a、10b与下侧保持装置20之间交接衬底w时可动台座32处于第2状态的方式控制台座驱动部33。这里,在第1状态下,下表面刷51处于应利用上侧保持装置10a、10b保持的衬底w的中心的下方。在第2状态下,下侧保持装置20的旋转中心处于应利用上侧保持装置10a、10b保持的衬底w的中心的下方。
[0173]
在所述情况下,能够容易在上侧保持装置10a、10b与下侧保持装置20之间交接衬底w,且利用共通的下表面刷51容易洗净利用上侧保持装置10a、10b保持的衬底w的下表面中央区域、与利用下侧保持装置20保持的衬底w的下表面外侧区域。
[0174]
[6]关于衬底洗净处理的变化例
[0175]
在本实施方式中,在利用下表面洗净装置50洗净衬底w的下表面外侧区域之后结束洗净,将衬底w从单元框体2内搬出,但实施方式不限定于所述。图17是表示第1变化例的衬底洗净处理的流程图。如图17所示,在本例中,在衬底洗净处理的步骤s12与步骤s13之间执行步骤s14~s19。
[0176]
具体来说,在步骤s12之后,交接控制部9d通过控制销升降驱动部43,将衬底w从下侧保持装置20再次交接到上侧保持装置10a、10b(步骤s14)。这时,衬底w的中心处于第1位置。在所述状态下,卡盘控制部9a通过控制下卡盘驱动部13a、13b及上卡盘驱动部14a、14b,利用上侧保持装置10a、10b保持衬底w(步骤s15)。
[0177]
接下来,台座控制部9c通过控制台座驱动部33,使可动台座32从第1水平位置移动到第2水平位置(步骤s16)。这时,下表面刷51的中心处于第1位置的下方。接着,下表面洗净控制部9e通过控制下表面刷旋转驱动部55a、下表面刷升降驱动部55b、下表面刷移动驱动部55c、下表面洗净液供给部56及喷出气体供给部57,而在衬底w的中心处于第1位置的状态下再次洗净衬底w的下表面中央区域(步骤s17)。
[0178]
之后,下表面洗净控制部9e通过控制喷出气体供给部57,而使衬底w干燥(步骤s18)。另外,台座控制部9c通过控制台座驱动部33,而使可动台座32从第2水平位置移动到第1水平位置(步骤s19)。在本例中,几乎同时执行步骤s18、s19。由此,依次干燥衬底w的下表面中央区域。最后,搬入搬出控制部9i通过控制闸门驱动部92,而从单元框体2内搬出衬底w(步骤s13),结束衬底洗净处理。
[0179]
根据第1变化例,利用下侧保持装置20保持的衬底w的下表面中央区域在上侧保持装置10a、10b中再次被洗净。由此,能够更适当地洗净衬底w。
[0180]
图18是表示第2变化例的衬底洗净处理的流程图。第2变化例的衬底洗净处理与第1变化例的衬底洗净处理不同的是以下的点。在第2变化例的衬底洗净处理中,省略步骤s3~s6的执行。也就是说,衬底w的下表面中央区域的洗净不在衬底w的下表面外侧区域的洗净之前进行,而只在衬底w的下表面外侧区域的洗净之后进行。
[0181]
根据第2变化例,利用下侧保持装置20保持的衬底w的下表面中央区域在上侧保持装置10a、10b中被洗净。在洗净衬底w的下表面外侧区域之前,不进行衬底w的下表面中央区域的洗净。由此,能够更适当且有效地洗净衬底w。
[0182]
在第2变化例中,搬入到单元框体2内的衬底w在由上侧保持装置10a、10b保持之后,利用多个支撑销41传递到下侧保持装置20,但实施方式不限定于所述。搬入到单元框体2内的衬底w也可不经由上侧保持装置10a、10b及多个支撑销41而直接传递到下侧保持装置20。在所述情况下,还省略图18的步骤s2、s7的执行。
[0183]
[7]具备衬底洗净装置1的衬底处理装置
[0184]
图19是表示具备图1的衬底洗净装置1的衬底处理装置的一例的示意性俯视图。如图19所示,本实施方式的衬底处理装置100具有分度块110及处理块120。分度块110及处理块120以相互相邻的方式设置。
[0185]
分度块110包含多个(在本例中为4个)托架载置台140及搬送部150。多个托架载置台140连接于搬送部150。在各托架载置台140上,载置多级收纳多张衬底w的托架c。在搬送部150,设置着分度机器人ir及控制部111。分度机器人ir构成为能够在搬送部150内移动,
且构成为能够绕铅直轴旋转且升降。分度机器人ir具有用来交接衬底w的多只手。多只手可为2只,也可为4只,以空出间隔排列于上下方向的方式受支撑。由此,分度机器人ir能够使用多只手同时搬送多张衬底w。控制部111包含含有cpu、rom及ram的电脑等,控制衬底处理装置100内的各构成部。
[0186]
处理块120包含洗净部161、162及搬送部163。洗净部161、搬送部163及洗净部162以与搬送部150相邻且按所述顺序排列的方式配置。在洗净部161、162中,多个(例如3个)衬底洗净装置1上下积层配置。
[0187]
在搬送部163设置着主机器人mr。主机器人mr构成为能够绕铅直轴旋转且升降。主机器人mr具有用来交接衬底w的多只手。所述主机器人mr的手相当于所述手rh。
[0188]
在分度块110与处理块120之间,用来在分度机器人ir与主机器人mr之间进行衬底w的交接的多个(例如20个左右)衬底载置部pass上下积层配置。
[0189]
在所述衬底处理装置100中,分度机器人ir从载置在多个托架载置台140上的多个托架c中的任一个托架c取出未处理的衬底w。另外,分度机器人ir将取出的未处理的衬底w载置在多个衬底载置部pass中的任一个衬底载置部pass。再者,分度机器人ir接受载置在多个衬底载置部pass中的任一个的已处理的衬底w,并收纳在一个托架c内。
[0190]
另外,主机器人mr接受载置在多个衬底载置部pass中的任一个的未处理的衬底w,并搬入到洗净部161、162的多个衬底洗净装置1中的任一个。再者,如果在多个衬底洗净装置1中的任一个中洗净处理结束,那么主机器人mr从所述衬底洗净装置1搬出已处理的衬底w,并载置在多个衬底载置部pass中的任一个。
[0191]
如上所述,图19的衬底处理装置100具有多个图1的衬底洗净装置1。由此,能够不翻转衬底w而在一个衬底洗净装置1内洗净衬底w的上表面及下表面。因此,衬底w的洗净处理的产量提高。另外,通过设置多个衬底洗净装置1,而充分减少占地面积的增加。
[0192]
如上所述,在本实施方式的衬底洗净装置1中,利用上侧保持装置10a、10b保持的衬底w的高度位置、与利用下侧保持装置20保持的衬底w的高度位置不同。因此,图19的主机器人mr具备对应于上侧保持装置10a、10b的一只手(以下,称为上手)、与对应于下侧保持装置20的另一只手(以下,称为下手)。
[0193]
图20是用来说明图19的主机器人mr对衬底洗净装置1搬入及搬出衬底w的具体例的图。在图20中,衬底w1、w2对于衬底洗净装置1的搬入及搬出动作利用多张侧视图按时间序列表示。在各侧视图中,示意性表示衬底洗净装置1的上侧保持装置10a、10b及下侧保持装置20、与主机器人mr的上手rh1及下手rh2。在主机器人mr中,上手rh1及下手rh2由搬送移动部rm移动。搬送移动部rm包含电动机及气缸等作为用来使上手rh1及下手rh2移动的驱动源。
[0194]
如最上段的侧视图所示,在初始状态下,在下侧保持装置20保持着已洗净处理的衬底w1。另外,在主机器人mr的上手rh1保持着未处理的衬底w2。再者,在初始状态下,下手rh2以在下侧保持装置20的上端部稍微下方的位置与下侧保持装置20对向的方式配置。另外,上手rh1以在上侧保持装置10a、10b的上端部稍微下方的位置与上侧保持装置10a、10b对向的方式配置。
[0195]
这里,将在上侧保持装置10a、10b中保持衬底的部分的高度位置、与在下侧保持装置20中保持衬底的部分的高度位置之间的距离称为第1距离d1。另外,将利用上手rh1保持
的衬底的高度位置与利用下手rh2保持的衬底的高度位置之间的距离称为第2距离d2。第1距离d1及第2距离d2分别为固定值。
[0196]
首先,搬出下侧保持装置20所保持的衬底w1。在所述情况下,如图20的第2段所示,最初下手rh2前进到利用下侧保持部20保持的衬底w1的下方的位置。
[0197]
接下来,如图20的第3段所示,下手rh2上升,接受下侧保持装置20所保持的衬底w1。另外,接受衬底w1的下手rh2从衬底洗净装置1后退,如图20的第4段所示,从衬底洗净装置1搬出衬底w1。再者,上手rh1上升到上侧保持装置10a、10b稍微上方的位置。
[0198]
接下来,如图20的第5段所示,以衬底w2位于上侧保持装置10a、10b的上方的方式,上手rh1前进。另外,上手rh1下降,如图20的第6段所示,将上手rh1所保持的衬底w2传递到上侧保持装置10a、10b。之后,利用上侧保持装置10a、10b保持衬底w2,上手rh1从衬底洗净装置1后退,如图20的第7段所示,从衬底洗净装置1退出。
[0199]
在图20的衬底处理装置100中,在相互对应的上手rh1与上侧保持装置10a、10b之间进行衬底w1的交接。在所述情况下,上手rh1需处于与上侧保持装置10a、10b大致相同的高度位置。另外,在相互对应的下手rh2与下侧保持装置20之间进行衬底w2的交接。在所述情况下,下手rh2需处于与下侧保持装置20大致相同的高度位置。
[0200]
如上所述,上手rh1及下手rh2以分开第2距离d2并上下排列的方式配置。因此,在互不相同的高度位置进行已处理的衬底w1的交接与未处理的衬底w2的交接的情况下,缩短上手rh1及下手rh2的上下方向的移动所需要的距离。具体来说,上手rh1及下手rh2的上下方向的移动距离被缩短为第1距离d1与第2距离d2的差量左右。由此,缩短对衬底洗净装置1搬出衬底w1及搬入衬底w2所需要的时间。因此,衬底处理装置100的衬底处理的产量提高。
[0201]
[8]其它实施方式
[0202]
(1)所述实施方式的气体喷出部53为具有在一方向延伸的气体喷出口的缝隙状气体喷射喷嘴,配置在下表面刷51与吸附保持部21之间,但本发明不限定于所述。气体喷出部53也可具有以下的构成。
[0203]
图21是用来说明气体喷出部53的其它构成例的图,图22是用来说明气体喷出部53的进而其它构成例的图。在图21及图22中,气体喷出部53与它的周边部件一起由俯视图表示。
[0204]
图21的气体喷出部53以在下表面刷51与吸附保持部21之间,沿下表面刷51的外周端部圆弧状延伸的方式形成。在所述情况下,因为能够沿下表面刷51的外形形成气体幕,所以能够更适当地防止污染物质从下表面刷51向吸附保持部21飞散。
[0205]
另外,图22的气体喷出部53具有分断图21的气体喷出部53的中央部分的构成。即使在这样的构成中,也能够在下表面刷51与吸附保持部21之间的至少一部分区域形成气体幕。由此,能够减少污染物质从下表面刷51向吸附保持部21飞散。此外,根据图22的构成,在下表面刷51与吸附保持部21最接近的区域不存在气体喷出部53。因此,能够抑制下表面刷51与吸附保持部21的干扰且缩短吸附保持部21与下表面刷51之间的距离。
[0206]
(2)在所述实施方式的下表面洗净装置50中,将2个液体喷嘴52在升降支撑部54的上表面54u上设置在下表面刷51的中心前方的位置。不限定于所述,2个液体喷嘴52也可设置在下表面刷51的中心后方的位置。另外,设置在下表面洗净装置50的液体喷嘴52的数量不限定于2个,可为1个,也可为3个以上。
[0207]
再者,所述实施方式的液体喷嘴52虽以面向上方的方式安装于升降支撑部54的上表面54u上,但也可以朝向下表面刷51面向斜上方的方式安装。
[0208]
(3)在所述实施方式的衬底洗净装置1中,衬底w的上表面由从喷雾喷嘴73喷射的混合流体洗净,但本发明不限定于所述。衬底洗净装置1也可具有使用刷子物理洗净衬底w的上表面的构成。或,在衬底洗净装置1中,斜角刷83也可洗净衬底w的上表面。此外,在利用刷子洗净衬底w时,需在衬底w的上表面设置供给洗净液的洗净液供给部。
[0209]
(4)在所述实施方式的衬底洗净装置1中,交接装置40在上侧保持装置10a、10b与下侧保持装置20之间进行衬底w的交接,但本发明不限定于所述。在上侧保持装置10a、10b及下侧保持装置20中的至少一个构成为能够升降的情况下,也可不设置交接装置40。在所述情况下,通过上侧保持装置10a、10b及下侧保持装置20中的至少一个升降,能够在上侧保持装置10a、10b与下侧保持装置20之间进行衬底w的移动。
[0210]
例如,在上侧保持装置10a、10b构成为能够在上下方向移动,且在与下侧保持装置20之间能够直接交接衬底w的情况下,衬底洗净装置1也可不包含交接装置40。在所述构成中,上侧保持装置10a、10b成为交接部,控制上侧保持装置10a、10b的动作的卡盘控制部9a成为交接控制部。
[0211]
或者,在下侧保持装置20构成为能够在上下方向移动,且在与上侧保持装置10a、10b之间能够直接交接衬底w的情况下,衬底洗净装置1也可不包含交接装置40。在所述构成中,下侧保持装置20成为交接部,控制下侧保持装置20的动作的吸附控制部9b成为交接控制部。
[0212]
(5)在所述实施方式的下表面洗净装置50中,升降支撑部54的上表面54u虽相对于水平面倾斜,但上表面54u也可水平构成。
[0213]
(6)在所述实施方式的衬底洗净装置1中,衬底w的下表面按下表面中央区域及下表面外侧区域的顺序被洗净,但本发明不限定于所述。
[0214]
在衬底洗净装置1中,衬底w的下表面也可按下表面外侧区域及下表面中央区域的顺序被洗净。在所述情况下,例如搬入到衬底洗净装置1的衬底在最初利用下侧保持装置20吸附保持的状态下,洗净它的下表面中央区域、外周端部及上表面。之后,利用下侧保持装置20保持的衬底w由上侧保持装置10a、10b接受、保持。在所述状态下,洗净衬底w的下表面中央区域。洗净后的衬底w被从上侧保持装置10a、10b搬出到单元框体2的外部。
[0215]
(7)在所述实施方式的衬底洗净装置1中,在衬底w的下表面中央区域的洗净中停止可动台座32及移动支撑部55的y方向的移动,但本发明不限定于所述。可动台座32及移动支撑部55中的至少一个也可在衬底w的下表面中央区域的洗净中在y方向移动。在所述情况下,在利用下表面刷51洗净衬底w的下表面中央区域时,能够洗净衬底w的下表面的更广范围。
[0216]
(8)在所述实施方式的衬底洗净装置1中,洗净利用上侧保持装置10a、10b保持的衬底w的下表面中央区域时,将处理杯61配置在下杯位置,但本发明不限定于所述。如果在处理杯61处于上杯位置的状态下处理杯61与上侧保持装置10a、10b不干扰,那么在洗净衬底w的下表面中央区域时处理杯61也可配置在上杯位置。
[0217]
(9)在所述实施方式的衬底洗净装置1中,在洗净利用上侧保持装置10a、10b保持的衬底w的下表面中央区域时,从液体喷嘴52对衬底w的下表面供给洗净液,但本发明不限
定于所述。也可代替在洗净衬底w的下表面中央区域时从液体喷嘴52对衬底w的下表面供给洗净液,而在洗净衬底w的下表面中央区域之前,以浸渍一定量的洗净液的方式从液体喷嘴52对下表面刷51供给洗净液。在所述情况下,在洗净衬底w的下表面中央区域时无需对衬底w的下表面供给洗净液。因此,在洗净衬底w的下表面中央区域时能够防止洗净液飞散。
[0218]
(10)在所述实施方式中,以在衬底w由上侧保持装置10a、10b保持时洗净衬底w的下表面中央区域的方式构成衬底洗净装置1,但实施方式不限定于所述。例如,衬底洗净装置1也可以在第1洗净模式与第2洗净模式下选择性动作的方式构成。
[0219]
第1洗净模式下,下表面洗净控制部9e以在衬底w由上侧保持装置10a、10b保持时洗净衬底w的下表面中央区域,在衬底w由下侧保持装置20保持时洗净衬底w的下表面外侧区域的方式控制下表面洗净装置50。另一方面,在第2洗净模式下,下表面洗净控制部9e以在衬底w由上侧保持装置10a、10b保持时不洗净衬底w,在衬底w由下侧保持装置20保持时洗净衬底w的下表面外侧区域的方式控制下表面洗净装置50。
[0220]
在所述情况下,能够通过使衬底洗净装置1在第1洗净模式下动作,来洗净衬底w的整个下表面。另一方面,在无需洗净衬底w的下表面中央区域的情况下,能够通过使衬底洗净装置1在第2洗净模式下动作,有效地洗净衬底w的下表面外侧区域。
[0221]
(11)在所述实施方式中,衬底洗净装置1包含上表面洗净装置70及端部洗净装置80,但实施方式不限定于所述。在可不洗净衬底w的上表面的情况下,衬底洗净装置1可不包含上表面洗净装置70。另外,在可不洗净衬底w的外周端部的情况下,衬底洗净装置1也可不包含端部洗净装置80。
[0222]
[9]权利要求的各构成要件与实施方式的各要件的对应关系
[0223]
以下,对权利要求的各构成要件与实施方式的各要件的对应例子进行说明。
[0224]
(1)关于权利要求1~10
[0225]
在所述实施方式中,上侧保持装置10a、10b为第1衬底保持部的例子,下侧保持装置20为第2衬底保持部的例子,交接装置40为移动部的例子,下表面刷51为洗净具的例子,升降支撑部54为洗净具升降部的例子。
[0226]
另外,吸附保持驱动部22为旋转驱动部的例子,可动台座32为台座部的例子,线性导轨31及台座驱动部33为台座移动部的例子,衬底洗净装置1为衬底洗净装置的例子。
[0227]
另外,下表面刷移动驱动部55c为移动驱动部的例子,下表面刷旋转驱动部55a为洗净具旋转驱动部的例子,升降支撑部54为被安装部件的例子,液体喷嘴52为洗净液供给部的例子,上表面54u为被安装部件的上表面的例子,气体喷出部53为气流产生部的例子。
[0228]
(2)关于权利要求11~17及24
[0229]
在所述实施方式中,上侧保持装置10a、10b为第1衬底保持部的例子,下侧保持装置20为第2衬底保持部的例子,交接装置40为衬底移动部的例子,下表面刷51为洗净具的例子,升降支撑部54为洗净具升降部的例子。
[0230]
另外,台座装置30、移动支撑部55及下表面刷移动驱动部55c为洗净具移动部的例子,液体喷嘴52为洗净液供给部的例子,处理杯61为处理杯的例子,衬底洗净装置1为衬底洗净装置的例子。
[0231]
另外,控制装置9为控制部的例子,下表面刷旋转驱动部55a为洗净具旋转驱动部的例子,杯驱动部62为处理杯驱动部的例子,主机器人mr为衬底搬送部的例子,上手rh1为
第1搬送保持部的例子,下手rh2为第2搬送保持部的例子,衬底处理装置100为衬底处理装置的例子。
[0232]
(3)关于权利要求18~23及25~30
[0233]
在所述实施方式中,衬底w为衬底的例子,上侧保持装置10a、10b为第1衬底保持部的例子,下侧保持装置20为第2衬底保持部的例子,交接装置40为交接部的例子,下表面刷51为洗净具的例子,下表面洗净控制部9e为洗净控制部的例子。衬底洗净装置1为衬底洗净装置的例子,交接控制部9d为交接控制部的例子,可动台座32为台座部的例子,台座驱动部33为台座驱动部的例子,台座控制部9c为台座控制部的例子。
[0234]
作为权利要求的各构成要件,也能够使用具有权利要求所记载的构成或功能的其它各种要件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。