1.本发明涉及基片处理装置、吹扫气体的控制方法和真空输送室的清洁方法。
背景技术:
2.在基片处理装置中,在向用于对基片进行处理的处理室输送基片的真空输送室,为了抑制颗粒的产生,作为吹扫气体例如流动n2气体。例如,具有从真空输送室的与负载锁定模块连接的一侧的相反侧供给吹扫气体,从与负载锁定模块连接的一侧排出吹扫气体的方法。吹扫气体例如在处理室与真空输送室之间以保持为减压气氛的状态送出基片时,对与闸门的打开、输送机构的机械臂的动作相应地被带出的处理室内的气氛进行吹扫。真空输送室内的颗粒通过吹扫气体的气流气氛而从排气口被排出。
3.此外,为了抑制真空输送室内的颗粒的产生,提案有一种方法,即:追加有对附着于输送机构的机械臂上的由残留气体产生的膜进行清洁的附属模块(专利文献1)。此外,为了除去沉积于收纳室内的颗粒,提案有一种方法,即:在基片输送部设置电极来施加高电压,通过使静电应力作用于收纳室内面而使所沉积的杂质脱离,并利用气流将其排出(专利文献2)。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2009-164213号公报
7.专利文献2:日本特开2005-317783号公报
技术实现要素:
8.发明所要解决的问题
9.本发明提供一种能够通过消除气体的滞留来抑制颗粒积存的基片处理装置、吹扫气体的控制方法和真空输送室的清洁方法。
10.用于解决问题的技术手段
11.本发明的一个方式的基片处理装置包括:真空输送室,其具有顶面、与顶面相对的底面以及顶面与底面之间的侧面,侧面具有第一侧面和与第一侧面相对的第二侧面;配置在真空输送室内的用于输送基片的输送机械臂;与第一侧面连接的负载锁定模块;配管,其与吹扫气体供给源连接,向真空输送室内供给吹扫气体;至少1个进气口,其设置在第二侧面的附近的顶面,与配管连接;和至少1个排气口,其设置在真空输送室的第一侧面的附近的底面,与用于对供给到真空输送室的吹扫气体进行排气的排气泵连接。
12.发明的效果
13.根据本发明,能够通过消除气体的滞留抑制颗粒积存。
附图说明
14.图1是表示本发明的第1实施方式中的基片处理装置的一个例子的横截面图。
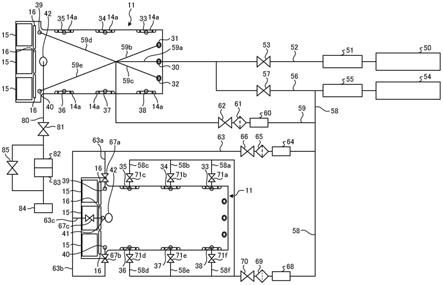
15.图2是表示第1实施方式中的去往真空输送室的配管系统的一个例子的图。
16.图3是表示第1实施方式中的吹扫气体的时序的一个例子的图。
17.图4是表示第1实施方式中的实验结果的一个例子的图。
18.图5是表示第1实施方式中的实验结果的一个例子的图。
19.图6是表示参考例中的实验结果的一个例子的图。
20.图7是表示参考例中的实验结果的一个例子的图。
21.图8是表示变形例1中的去往真空输送室的配管系统的一个例子的图。
22.图9是表示变形例1中的吹扫气体的时序的一个例子的图。
23.图10是表示变形例2的去往真空输送室的配管系统的一个例子的图。
24.图11是表示变形例2中的吹扫气体的时序的一个例子的图。
25.图12是表示变形例3中的去往真空输送室的配管系统的一个例子的图。
26.图13是表示变形例3中的吹扫气体的时序的一个例子的图。
27.图14是表示第2实施方式中的阀开闭时序的一个例子的图。
28.图15是表示第2实施方式中的实验结果的一个例子的图。
29.图16是表示第2实施方式中的实验结果的一个例子的图。
30.图17是表示第2实施方式中的实验结果的一个例子的图。
31.图18是表示第2实施方式中的实验结果的一个例子的图。
32.图19是表示第2实施方式中的实验结果的一个例子的图。
33.图20是表示变形例4中的阀开闭时序的一个例子的图。
34.图21是表示变形例5中的阀开闭时序的一个例子的图。
35.图22是表示变形例6中的阀开闭时序的一个例子的图。
36.图23是表示变形例7中的阀开闭时序的一个例子的图。
37.图24是表示变形例8中的阀开闭时序的一个例子的图。
38.图25是表示变形例9中的阀开闭时序的一个例子的图。
39.图26是表示变形例10中的阀开闭时序的一个例子的图。
40.图27是表示变形例11中的阀开闭时序的一个例子的图。
41.图28是表示变形例12中的阀开闭时序的一个例子的图。
42.图29是表示变形例13中的去往真空输送室的配管系统的一个例子的图。
43.图30是表示变形例13中的阀开闭时序的一个例子的图。
44.图31是表示变形例13中的实验结果的一个例子的图。
45.图32是表示变形例13中的实验结果的一个例子的图。
46.图33是表示变形例13中的实验结果的一个例子的图。
47.图34是表示变形例13中的实验结果的一个例子的图。
48.图35是表示变形例13中的实验结果的一个例子的图。
49.图36是表示变形例14中的阀开闭时序的一个例子的图。
50.图37是表示变形例15中的阀开闭时序的一个例子的图。
51.图38是表示变形例16中的阀开闭时序的一个例子的图。
52.图39是表示变形例17中的阀开闭时序的一个例子的图。
53.图40是表示变形例18中的阀开闭时序的一个例子的图。
54.图41是表示变形例19中的阀开闭时序的一个例子的图。
55.图42是表示变形例20中的阀开闭时序的一个例子的图。
56.图43是表示变形例21中的阀开闭时序的一个例子的图。
57.图44是表示变形例22中的阀开闭时序的一个例子的图。
58.图45是表示第1实施方式的真空输送室中的进气口的配置的一个例子的俯视图。
59.附图标记的说明
60.1基片处理装置
61.10装置主体
62.11真空输送室(vtm)
63.12机械臂
64.13处理模块(pm)
65.14、16闸门
66.14a连接部
67.15负载锁定模块(llm)
68.30~41进气口
69.42排气口
70.54吹扫气体供给源
71.56、58、59、63、90、96配管
72.60、64、68、91质量流量控制器(mfc)
73.57、62、94a~94i阀
74.95、97a~97i节流孔
75.100控制装置
具体实施方式
76.以下,基于附图详细地说明要公开的基片处理装置、吹扫气体的控制方法和真空输送室的清洁方法的实施方式。另外,公开技术并没有被以下的实施方式限定。
77.在真空输送室中,产生从吹扫气体的供给侧去往排气侧的气流气氛,但是在真空输送室的长度大的情况下等,有时气流气氛会不均匀。在气流气氛不均匀的情况下,存在从处理室送出被处理后的基片时,处理室内的气氛被带出而发生外部气体积存的情况。外部气体积存成为真空输送室内的颗粒产生的重要原因。此外,在从处理室送出被处理后的基片时,吹扫气体的流量不足的情况下,存在向真空输送室带出处理室内的气氛,残留气体与真空输送室内的水分反应而成为凝结颗粒的原因的情况。因此,期待通过消除气体的滞留来抑制颗粒积存。
78.(第1实施方式)
79.[基片处理装置1的结构]
[0080]
图1是表示本发明的第1实施方式中的基片处理装置的一个例子的横截面图。图1所示的基片处理装置1是能够按片对晶片(例如,半导体晶片。)实施等离子体处理等各种处
理的基片处理装置。
[0081]
基片处理装置1包括装置主体10和控制装置主体10的控制装置100。装置主体10例如图1所示那样,包括真空输送室11、多个处理模块13、多个负载锁定模块15和efem(equipment front end module:设备前端模块)18。另外,在以下的说明中,还将真空输送室11表现为vtm(vacuum transfer module:真空传输模块)11,将处理模块13表现为pm(process module:处理模块)13,将负载锁定模块15表现为llm(load lock module:负载锁定模块)15。
[0082]
vtm11在平面视图中具有大致四边形状。vtm11在相对的2个侧面分别连接有多个pm13。此外,在vtm11的另外的相对的2个侧面中的一个侧面连接有llm15。即,vtm11具有顶面、与顶面相对的底面以及顶面与底面之间的侧面,侧面具有第一侧面和与第一侧面相对的第二侧面。此外,在第一侧面连接有llm15。vtm11具有真空室,在内部配置有机械臂12。
[0083]
机械臂12构成为可旋转、伸缩、升降。机械臂12通过在配置于前端的叉部来载置晶片,能够在pm13与llm15之间输送晶片。机械臂12是真空输送机械臂的一个例子。另外,机械臂12只要能够在pm13与llm15之间输送晶片即可,并不限定于图1所示的结构。此外,在机械臂12内设置有用于施加高电压的电极。
[0084]
pm13具有处理室,具有配置在内部的圆柱状的载置台(支承台)。pm13在晶片被载置于载置台之后,对内部减压后导入处理气体,并进一步对内部施加高频电功率来生成等离子体,利用等离子体对晶片实施等离子体处理。vtm11与pm13由可开闭的闸门14隔开。
[0085]
llm15配置在vtm11与efem18之间。llm15具有能够将内部切换为真空、大气压的内压可变室,具有配置在内部的圆柱状的载置台。llm15在将晶片从efem18向vtm11送入时,将内部维持为大气压,从efem18接受晶片后,对内部减压,向vtm11送入晶片。此外,在将晶片从vtm11向efem18送出时,将内部维持为真空,从vtm11接受晶片之后,将内部升压至大气压,向efem18送出晶片。llm15与vtm11由可开闭的闸门16隔开。此外,llm15与efem18由可开闭的闸门17隔开。
[0086]
efem18与vtm11相对地配置。efem18为长方体形,设有ffu(fan filter unit:风机过滤单元),是被保持为大气压气氛的大气输送室。在沿着efem18的长度方向的一个侧面连接有3个llm15。在沿着efem18的长度方向的另一个侧面,连接有5个装载端口(lp:load port)19。在lp19载置有作为收纳多个晶片的容器的foup(front-opening unified pod:前开式晶片传送盒)(未图示)。在efem18内配置有输送晶片的大气输送机械臂(机械臂)(未图示)。efem18是装载模块的一个例子。
[0087]
基片处理装置1具有控制装置100。控制装置100例如是计算机,包括cpu(central processing unit:中央处理器)、ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、辅助存储装置等。cpu基于储存在rom或辅助存储装置中的程序进行动作,控制基片处理装置1的各构成要素的动作。
[0088]
[去往vtm11的配管系统的详细情况]
[0089]
图2是表示第1实施方式中的去往真空输送室的配管系统的一个例子的图。另外,在图2中,为了说明配管系统而将vtm11分为2部分进行描述,但实际上是去往1个vtm11的配管系统。
[0090]
如图2所示,vtm11具有:位于与连接有llm15的第一侧面相对的第二侧面侧,且设
置在第二侧面的中心部的顶面的进气口30和设置在第二侧面的中心部的两侧的顶面的进气口31、32。此外,vtm11具有在与各pm13对应的各闸门14的连接部14a设置的进气口33~38和在与llm15对应的各闸门16的连接部设置的进气口39~41。此外,vtm11在第一侧面侧的底面中心部具有排气口42。
[0091]
干燥空气供给源50经由调节器51、配管52和阀53与进气口30连接。调节器51调节向配管52供给的干燥空气的压力。阀53控制去往进气口30的干燥空气的供给/停止。吹扫气体供给源54经由调节器55、配管56和阀57,与配管52中的比阀53靠vtm11侧的位置连接。调节器55调节向配管56供给的吹扫气体的压力。阀57控制去往进气口30的吹扫气体的供给/停止。
[0092]
此外,从配管56分支出配管58,从配管58进一步分支出配管59、63。配管59经由mfc(mass flow controller:质量流量控制器)60、过滤器61和阀62与进气口30~32、39、40连接。配管59在比阀62靠vtm11侧的位置,分支出分别与进气口30~32、39、40对应的配管59a~59e。mfc60是控制配管59的吹扫气体的流量的流量控制器。过滤器61是用于除去吹扫气体中的颗粒等的过滤器。阀62控制去往进气口30~32、39、40的吹扫气体的供给/停止。另外,mfc60是第一质量流量控制器的一个例子,配管59是第一配管的一个例子。
[0093]
配管63经由mfc64、过滤器65和阀66与进气口39~41连接。配管63在比阀66靠vtm11侧的位置,分支出分别与进气口39~41对应的配管63a~63c。此外,在配管63a~63c分别设置有阀67a~67c。mfc64控制配管63的吹扫气体的流量。过滤器65是用于除去吹扫气体中的颗粒等的过滤器。阀66控制去往进气口39~41的吹扫气体的供给/停止。另外,mfc64是第二质量流量控制器的一个例子,配管63是第二配管的一个例子。
[0094]
分支出配管63之后的配管58经由mfc68、过滤器69和阀70与进气口33~38连接。配管58在比阀70靠vtm11侧的位置,分支出分别与进气口33~38对应的配管58a~58f。此外,在配管58a~58f分别设置有阀71a~71f。mfc68控制分支出配管63之后的配管58的吹扫气体的流量。过滤器69是用于除去吹扫气体中的颗粒等的过滤器。阀70控制去往进气口33~38的吹扫气体的供给/停止。另外,mfc68是第三质量流量控制器的一个例子,分支出配管63之后的配管58是第三配管的一个例子。
[0095]
干燥空气供给源50例如在大气打开时向vtm11内供给干燥空气。吹扫气体供给源54经由配管56、52向进气口30供给吹扫气体。此外,吹扫气体供给源54经由配管58、59、63向进气口30~41供给吹扫气体。经由配管58、59、63去往进气口30~41的吹扫气体的供给在通常运转时一直进行。作为吹扫气体,能够使用n2气体。另外,经由配管56、52进行的吹扫气体的供给例如在清洁的执行时进行,在通常运转时不进行。此外,也可以不设置配管56和阀57,将配管58与调节器55连接。
[0096]
在排气口42连接排气管80。排气管80经由阀81与apc(automatic pressure control)82和tmp(turbo molecular pump)83连接。tmp83与干式泵84连接。此外,在绕过apc82和tmp83而与干式泵84连接的配管设置有阀85。apc82是作为可变式蝶阀的自动压力控制阀,自动地进行vtm11内的压力控制。tmp83和干式泵84是抽真空用的排气泵,在开始从大气压减压的情况下将阀85打开,仅利用干式泵84进行排气,当减压持续时关闭阀85,进行利用tmp83和干式泵84的排气。
[0097]
[吹扫气体的控制方法]
[0098]
接着,说明第1实施方式的吹扫气体的控制方法。图3是表示第1实施方式的吹扫气体的时序的一个例子的图。另外,在图3中,将mfc60(第一质量流量控制器)表示为“mfc1”,将mfc64(第二质量流量控制器)表示为“mfc2”,将mfc68(第三质量流量控制器)表示为“mfc3”。
[0099]
此外,在图3中,关于真空输送室的状态,将处于待机状态或输送中的情况表示为“待机/输送中”。同样,关于真空输送室的状态,将打开闸门16并在与llm15之间进行晶片的送出送入的情况表示为“llm交换”,将打开闸门14并在与pm13之间进行晶片的送出送入的情况表示为“pm交换”。
[0100]
首先,作为初始状态,vtm11为待机状态(步骤s1),阀53、57关闭。此外,mfc60的流量设定为规定的流量(100%),例如1000sccm,打开阀62,以进气口30~32的合计流量与进气口39、40的合计流量成为均等的方式供给吹扫气体。另一方面,mfc64和mfc68将流量控制为0%。此外,apc82将阀体的开闭角度指定为规定的角度,vtm11内被调压为规定的压力(例如50mtorr)。此时,吹扫气体的气流从与连接有llm15的第一侧面相对的第二侧面侧向第一侧面侧流动,从位于第一侧面侧的底面的排气口42排出。
[0101]
控制装置100在打开闸门16并在与llm15之间进行晶片的送出送入的情况下(步骤s2),令mfc60的流量保持为100%。控制装置100也令mfc64和mfc68的流量保持为0%。另外,控制装置100对于mfc64的流量,也可以如图3中以虚线表示的那样,进行渐变控制以使其向规定的流量(100%)变化。在进行渐变控制的情况下,打开阀67a~67c,从进气口39~41供给吹扫气体。此外,控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0102]
控制装置100利用机械臂12使晶片移动至vtm11内后关闭闸门16。控制装置100利用机械臂12使晶片从闸门16的跟前输送至输送目的地的pm13的闸门14的跟前。在这样处于晶片的输送中的情况下(步骤s3),控制装置100令mfc60的流量保持为100%。此外,控制装置100令mfc64和mfc68的流量为0%。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0103]
控制装置100在打开闸门14并在与pm13之间进行晶片的送出送入的情况下(步骤s4),令mfc60的流量保持为100%。控制装置100还令mfc64的流量保持为0%。另一方面,控制装置100对于mfc68的流量进行渐变控制使其向规定的流量(100%)变化。此时,打开阀71a~71f,从进气口33~38供给吹扫气体。由此,能够抑制由于吹扫气体向pm13侧流动而产生的vtm11内的气流的紊乱。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0104]
控制装置100在将晶片载置于pm13内之后,使机械臂12移动至vtm11内,关闭闸门14。vtm11返回待机状态(步骤s1)。在这种情况下,与步骤s3同样,控制装置100令mfc60的流量保持为100%。此外,控制装置100令mfc64和mfc68的流量为0%。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。由此,vtm11内的吹扫气体的流动变得均匀,能够消除包含残留气体的成分的吹扫气体的滞留,从而能够抑制颗粒积存。此外,不易在vtm11内的侧壁附着沉积物。
[0105]
如上所述,在vtm11中,在第二侧面的附近的顶面设置有与吹扫气体供给源54连接且与向vtm11内供给吹扫气体的配管59连接的至少1个进气口(进气口30~32)。从进气口供
给的吹扫气体,从设置在vtm11的第一侧面的附近的底面且连接有将供给至vtm11的吹扫气体排出的tmp83和干式泵84的至少1个排气口42排出。总之,至少1个进气口(进气口30~32)和排气口42是使得吹扫气体的气流从第二侧面向第一侧面去的配置。
[0106]
第二侧面的附近是指,在将顶面从第一侧面至第二侧面在该方向上进行8等分时,距第二侧面最近的顶面的部分(从第二侧面向第一侧面去的12.5%为止的部分),进气口位于该部分。优选,进气口也可以位于在将顶面从第一侧面至第二侧面在该方向上进行10等分时,距第二侧面最近的顶面的部分(从第二侧面向第一侧面去的10%为止的部分)。进一步优选,进气口也可以位于在将顶面从第一侧面至第二侧面在该方向上进行20等分时,距第二侧面最近的顶面的部分(从第二侧面向第一侧面去的5%为止的部分)。另外,也可以取代在第二侧面的附近,而在将第二侧面从vtm11的底面至顶面在该方向上进行2等分时,在距顶面近的第二侧面的部分(从顶面向底面去的50%为止的部分)设置至少1个进气口(进气口30~32)。更靠近第二侧面地设置进气口,能够减小没有被供给吹扫气体的区域,从使气流气氛宽范围地均等化的观点出发是优选的。
[0107]
图45是表示第1实施方式的真空输送室的进气口的配置的一个例子的俯视图。在图45中,表示基片处理装置1的结构的俯视图(除efem18和lp19以外)。如图45中记载的那样,例如在8等分的例子中,在将第一侧面11a与第二侧面11b之间的线段ab进行8等分时,距第二侧面11b最近的顶面,即阴影部分设置进气口。10等分、20等分也同样在将图45的线段ab进行10等分、20等分时,距第二侧面11b最近的顶面设置进气口。
[0108]
另外,vtm11可以在平面视图中为矩形,也可以使第二侧面11b由例如第二侧面11c所示那样的2个面构成,在平面视图中例如为以五边形为一个例子的多边形。
[0109]
另外,vtm11也可以在第一侧面的附近的顶面设置与配管59连接的至少1个进气口(进气口39~41),在第二侧面的附近的底面设置排气口42。即,至少1个进气口(进气口39~41)和排气口42的位置也可以为吹扫气体的气流从第一侧面向第二侧面去的配置。
[0110]
第一侧面的附近是指,在将顶面从第一侧面至第二侧面在该方向上进行8等分时,距第一侧面最近的顶面的部分(从第一侧面向第二侧面去的12.5%为止的部分),进气口位于该部分。优选进气口也可以位于在将顶面从第二侧面至第一侧面进行10等分时,距第一侧面最近的顶面的部分(从第一侧面向第二侧面去、10%为止的部分)。进一步优选,进气口还可以位于在将顶面从第二侧面至第一侧面进行20等分时,距第一侧面最近的顶面的部分(从第一侧面向第二侧面去的5%为止的部分)。总之,关于第一侧面的附近,也如图45中记载的那样,例如在8等分的例子中,在将第一侧面11a与第二侧面11b之间的线段ab进行8等分时,距第一侧面11a最近的顶面设置进气口。10等分、20等分也同样,在将图45的线段ab进行10等分、20等分时,距第一侧面11a最近的顶面设置进气口。
[0111]
排气口42在至少1个进气口(进气口30~32)位于第二侧面的附近的情况下,位于第一侧面的附近。即,排气口42位于在将底面从第一侧面至第二侧面在该方向上进行8等分时,距第一侧面最近的底面的部分(从第一侧面向第二侧面去的12.5%为止的部分)。优选,排气口42也可以位于在将底面从第二侧面至第一侧面进行10等分时,距第一侧面最近的底面的部分(从第一侧面向第二侧面去的10%为止的部分)。进一步优选,排气口42还可以位于在将底面从第二侧面至第一侧面进行20等分时,距第一侧面最近的底面的部分(从第一侧面向第二侧面去的5%为止的部分)。总之,如图45中记载的那样,例如在8等分的例子中,
在将第一侧面11a与第二侧面11b之间的线段ab进行8等分时,距第一侧面11a最近的底面设置排气口42。10等分、20等分也同样,在将图45的线段ab进行10等分、20等分时,距第一侧面11a最近的底面设置排气口42。
[0112]
此外,排气口42在至少1个进气口(进气口30~32)位于第一侧面的附近的情况下,位于第二侧面的附近。即,排气口42位于在将底面从第一侧面至第二侧面在该方向上进行8等分时,距第二侧面最近的底面的部分(从第二侧面向第一侧面去的12.5%为止的部分)。优选排气口42也可以位于在将底面从第二侧面至第一侧面进行10等分时,距第二侧面最近的底面的部分(从第二侧面向第一侧面去的10%为止的部分)。进一步优选,排气口42还可以位于在将底面从第二侧面至第一侧面进行20等分时,距第二侧面最近的底面的部分(从第二侧面向第一侧面去的5%为止的部分)。
[0113]
[实验结果]
[0114]
接着,使用图4至图7对使用模拟的第1实施方式中的实验例和参考例进行说明。图4和图5是表示第1实施方式中的实验结果的一个例子的图。图6和图7是表示参考例中的实验结果的一个例子的图。另外,在图4~图7中,在vtm11等的外部存在气流的流动溢出的部分,这是模拟中的表现上的手法,实际上从vtm11等没有气流的溢出。
[0115]
在图4和图5所示的实验例中,向vtm11内,从进气口30供给100sccm的吹扫气体,从进气口31、32分别供给200sccm的吹扫气体,从进气口39、40分别供给250sccm的吹扫气体,从排气口42排气。其结果是,vtm11内的吹扫气体的流动变得均匀,在连接有pm13的面附近也有吹扫气体的流动。
[0116]
另一方面,在图6和图7所示的参考例中,向vtm120内,从进气口121供给1000sccm的吹扫气体,从排气口122排气。其结果是,vtm120内的吹扫气体的流动不均匀,在vtm120的四边存在吹扫气体滞留的区域。此外,在与pm13的连接部也存在吹扫气体滞留的区域。如此可知,在实验例中,与参考例相比在vtm11内整个区域吹扫气体都均匀地流动。
[0117]
[变形例1]
[0118]
在上述的实施方式中,使用配管58、59、63这三个配管向vtm11内供给吹扫气体,但也可以将配管58和配管63组合成1个系统,关于这种情况下的实施方式,作为变形例1进行说明。另外,变形例1中的基片处理装置与上述的实施方式的基片处理装置1相同,因此省略对其重复的结构和动作的说明。
[0119]
图8是表示变形例1中的去往真空输送室的配管系统的一个例子的图。如图8所示,变形例1的配管系统中,配管59的系统与上述的实施方式相同,取代配管59的分支后的配管58和配管63,而具有配管90。配管90经由mfc91、过滤器92和阀93与进气口33~41连接。配管90在比阀93更靠vtm11侧分支为分别与进气口33~41对应的配管90a~90i。此外,在配管90a~90i分别设置有阀94a~94i。mfc91控制配管90中的吹扫气体的流量。过滤器92是用于除去吹扫气体中的颗粒等的过滤器。阀93控制供向进气口33~41的吹扫气体的供给/停止。阀94a~94i在配管90a~90i分别单独地控制去往进气口33~41的吹扫气体的供给/停止。另外,mfc91是第四质量流量控制器的一个例子,配管90是第四配管的一个例子。此外,也可以不设置配管56和阀57,将配管58连接于调节器55。
[0120]
[变形例1的吹扫气体的控制方法]
[0121]
接着,对变形例1的吹扫气体的控制方法进行说明。图9是表示变形例1中的吹扫气
体的时序的一个例子的图。另外,在图9中,将mfc60(第一质量流量控制器)表示为“mfc1”,将mfc91(第四质量流量控制器)表示为“mfc4”。此外,在图9中,关于真空输送室的状态,与图3同样以“待机/输送中”、“llm交换”和“pm交换”表示。
[0122]
首先,作为初始状态,vtm11为待机状态(步骤s11),阀53、57关闭。此外,mfc60的流量设定为规定的流量(100%),例如1000sccm,并打开阀62,以进气口30~32的合计流量与进气口39、40的合计流量成为均等的方式供给吹扫气体。另一方面,mfc91将流量控制为0%。此外,apc82将阀体的开闭角度指定为规定的角度,vtm11内被调压为规定的压力(例如50mtorr)。此时,吹扫气体的气流从与连接有llm15的第一侧面相对的第二侧面侧向第一侧面侧流动,从位于第一侧面侧的底面的排气口42排出。
[0123]
控制装置100在打开闸门16并在与llm15之间进行晶片的送出送入的情况下(步骤s12),令mfc60的流量保持为100%。控制装置100对于mfc91的流量进行渐变控制使其向规定的流量(100%)变化。此时,打开阀94a~94i,从进气口33~41供给吹扫气体。另外,也可以阀94a~94f因为是pm13侧而关闭,从进气口39~41供给吹扫气体。此外,控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0124]
控制装置100利用机械臂12使晶片移动至vtm11内后关闭闸门16。控制装置100利用机械臂12使晶片从闸门16的跟前输送至输送目的地的pm13的闸门14的跟前。在这样处于晶片的输送中的情况下(步骤s13),控制装置100令mfc60的流量保持为100%。此外,控制装置100令mfc91的流量为0%。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0125]
控制装置100在打开闸门14并在与pm13之间进行晶片的送出送入的情况下(步骤s14),令mfc60的流量保持为100%。控制装置100对于mfc91的流量进行渐变控制使其向规定的流量(100%)变化。此时,打开阀94a~94i,从进气口33~41供给吹扫气体。另外,也可以阀94g~94i因为是llm15侧而关闭,从进气口33~38供给气体。由此,能够抑制由于吹扫气体向pm13侧流动而产生的vtm11内的气流的紊乱。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0126]
控制装置100在将晶片载置在pm13内之后,使机械臂12移动至vtm11内,关闭闸门14。vtm11返回待机状态(步骤s11)。在这种情况下,与步骤s13同样,控制装置100令mfc60的流量保持为100%。此外,控制装置100令mfc91的流量为0%。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。由此,vtm11内的吹扫气体的流动变得均匀,能够消除包含残留气体的成分的吹扫气体的滞留,从而能够抑制颗粒积存。此外,与上述的实施方式相比能够减少配管系统。
[0127]
[变形例2]
[0128]
在上述的实施方式和变形例1中,在配管59设置有mfc60,控制从进气口30~32、39、40释放(供给)的吹扫气体的流量,但也可以取代mfc60而使用节流孔,关于这种情况下的实施方式,作为变形例2来说明。另外,变形例2中的基片处理装置与上述的实施方式和变形例1的基片处理装置1是同样的,因此省略其重复的结构和动作的说明。
[0129]
图10是表示变形例2中的去往真空输送室的配管系统的一个例子的图。如图10所示,变形例2中的配管系统,与变形例1相比,取代mfc60而具有节流孔95。另外,变形例2中的配管系统除节流孔95以外与变形例1是同样的。节流孔95将配管59的吹扫气体设定为规定
的流量。另外,具有节流孔95的配管59是第五配管的一个例子,设置在具有节流孔95的配管59上的阀62是第一阀的一个例子,节流孔95是第一节流孔的一个例子。另外,也可以不设置配管56和阀57,而将配管58连接于调节器55。
[0130]
[变形例2的吹扫气体的控制方法]
[0131]
接着,对变形例2的吹扫气体的控制方法进行说明。图11是表示变形例2中的吹扫气体的时序的一个例子的图。另外,在图11中,将节流孔95(第一节流孔)表示为“节流孔1”,将mfc91(第四质量流量控制器)表示为“mfc4”。此外,在图11中,关于真空输送室的状态,与图3同样以“待机/输送中”、“llm交换”和“pm交换”表示。
[0132]
首先,作为初始状态,vtm11为待机状态(步骤s21),阀53、57关闭。此外,节流孔95使用被设定为规定的流量(在图11中表示为100%)例如1000sccm的节流孔,打开阀62,以进气口30~32的合计流量与进气口39、40的合计流量成为均等的流量的方式供给吹扫气体。另一方面,mfc91将流量控制为0%。此外,apc82将阀体的开闭角度指定为规定的角度,vtm11内被调压为规定的压力(例如50mtorr)。此时,吹扫气体的气流从与连接有llm15的第一侧面相对的第二侧面侧向第一侧面侧流动,从位于第一侧面侧的底面的排气口42排出。
[0133]
在打开闸门16并在与llm15之间进行晶片的送出送入的情况下(步骤s22),因为节流孔95的流量不能变更,所以保持为100%。另一方面,控制装置100对于mfc91的流量进行渐变控制使其向规定的流量(100%)变化。此时,打开阀94a~94i,从进气口33~41供给吹扫气体。另外,也可以阀94a~94f因为是pm13侧而关闭,从进气口39~41供给吹扫气体。此外,控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0134]
控制装置100利用机械臂12使晶片移动至vtm11内后关闭闸门16。控制装置100利用机械臂12使晶片从闸门16的跟前输送至输送目的地的pm13的闸门14的跟前。在这样处于晶片的输送中的情况下(步骤s23),因为节流孔95的流量不能变更,所以保持为100%。此外,控制装置100令mfc91的流量为0%。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0135]
在打开闸门14并在与pm13之间进行晶片的送出送入的情况下(步骤s24),因为节流孔95的流量不能变更,所以保持为100%。控制装置100对于mfc91的流量进行渐变控制使其向规定的流量(100%)变化。此时,打开阀94a~94i,从进气口33~41供给吹扫气体。另外,也可以阀94g~94i因为是llm15侧而关闭,从进气口33~38供给气体。由此,能够抑制由于吹扫气体向pm13侧流动而产生的vtm11内的气流的紊乱。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0136]
控制装置100在将晶片载置在pm13内之后,使机械臂12移动至vtm11内,关闭闸门14。vtm11返回待机状态(步骤s21)。在这种情况下,与步骤s23同样,因为节流孔95的流量不能变更,所以保持为100%。此外,控制装置100令mfc91的流量为0%。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。由此,vtm11内的吹扫气体的流动变得均匀,能够消除包含残留气体的成分的吹扫气体的滞留,从而能够抑制颗粒积存。此外,与上述的实施方式相比能够减少配管系统。另外,因为将mfc60变更为廉价的节流孔95,所以能够比上述的变形例1降低成本。
[0137]
[变形例3]
[0138]
在上述的变形例1中,在配管90设置有mfc91、过滤器92和阀93,且在比阀93靠
vtm11侧分支出配管90a~90i,但也可以在分支后的配管设置节流孔、过滤器和阀,关于这种情况下的实施方式,作为变形例3进行说明。另外,变形例3中的基片处理装置与上述的实施方式和变形例1的基片处理装置1是同样的,因此省略其重复的结构和动作的说明。
[0139]
图12是表示变形例3中的去往真空输送室的配管系统的一个例子的图。如图12所示,变形例3的配管系统中,配管59的系统与上述的变形例1同样,取代配管90而具有配管96。配管96分支出分别与进气口33~41对应的配管96a~96i。此外,在配管96a~96i分别设置有节流孔97a~97i、过滤器98a~98i和阀94a~94i。节流孔97a~97i将配管96a~96i各自的吹扫气体设定为规定的流量。过滤器98a~98i是用于除去吹扫气体中的颗粒等的过滤器。阀94a~94i分别利用配管96a~96i单独地控制去往进气口33~41的吹扫气体的供给/停止。另外,配管96是第六配管的一个例子,节流孔97a~97i是第二节流孔的一个例子,阀94a~94i是第二阀的一个例子。此外,也可以不设置配管56和阀57,而将配管58连接于调节器55。
[0140]
[变形例3的吹扫气体的控制方法]
[0141]
接着,对变形例3的吹扫气体的控制方法进行说明。图13是表示变形例3中的吹扫气体的时序的一个例子的图。另外,在图13中,将mfc60(第一质量流量控制器)表示为“mfc1”,将节流孔97a~97i(第二质量流量控制器)表示为“节流孔2”。此外,在图13中,关于真空输送室的状态,与图3同样以“待机/输送中”、“llm交换”和“pm交换”表示。
[0142]
首先,作为初始状态,vtm11为待机状态(步骤s31),阀53、57关闭。此外,mfc60的流量设定为规定的流量(100%),例如1000sccm,打开阀62,以进气口30~32的合计流量与进气口39、40的合计流量成为均等的方式供给吹扫气体。另一方面,配管96a~96i的流量通过关闭阀94a~94i而控制为0%。此外,apc82将阀体的开闭角度指定为规定的角度,vtm11内被调压为规定的压力(例如50mtorr)。此时,吹扫气体的气流从与连接有llm15的第一侧面相对的第二侧面侧向第一侧面侧流动,从位于第一侧面侧的底面的排气口42排出。
[0143]
控制装置100在打开闸门16并在与llm15之间进行晶片的送出送入的情况下(步骤s32),令mfc60的流量保持为100%。控制装置100打开阀94a~94i。此时,从进气口33~41供给通过节流孔97a~97i分别设定了的流量的吹扫气体。另外,也可以阀94a~94f因为是pm13侧而关闭,从进气口39~41供给吹扫气体。此外,控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0144]
控制装置100利用机械臂12使晶片移动至vtm11内后关闭闸门16。控制装置100利用机械臂12使晶片从闸门16的跟前输送至输送目的地的pm13的闸门14的跟前。在这样处于晶片的输送中的情况下(步骤s33),控制装置100令mfc60的流量保持为100%。此外,控制装置100关闭阀94a~94i,令供向进气口33~41的流量为0%。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0145]
控制装置100在打开闸门14并在与pm13之间进行晶片的送出送入的情况下(步骤s34),令mfc60的流量保持为100%。控制装置100打开阀94a~94i。此时,从进气口33~41供给通过节流孔97a~97i分别设定了的流量的吹扫气体。另外,也可以阀94g~94i因为是llm15侧而关闭,从进气口33~38供给气体。由此,能够抑制由于吹扫气体向pm13侧流动而产生的vtm11内的气流的紊乱。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。
[0146]
控制装置100在将晶片载置在pm13内之后使机械臂12移动至vtm11内,关闭闸门14。控制装置100返回待机状态(步骤s31)。在这种情况下,与步骤s33同样,控制装置100令mfc60的流量保持为100%。此外,控制装置100关闭阀94a~94i,令向进气口33~41的流量为0%。控制装置100对于apc82,继续以通过角度指定来进行调压的方式进行控制。由此,vtm11内的吹扫气体的流动变得均匀,能够消除包含残留气体的成分的吹扫气体的滞留,从而能够抑制颗粒积存。此外,与上述的实施方式相比能够减少配管系统。进一步,因为取代mfc91而利用廉价的节流孔97a~97i和阀94a~94i来控制进气口33~41的流量,所以能够比上述的变形例3降低成本。
[0147]
(第2实施方式)
[0148]
在上述的第1实施方式和变形例1~3中,通过使vtm11内的吹扫气体的气流均匀,抑制了颗粒积存,但是也可以设为缩短排出颗粒所需的时间,关于这种情况下的实施方式,作为第2实施方式进行说明。另外,第2实施方式中的基片处理装置与上述的变形例1的基片处理装置1同样,因此省略其重复的结构和动作的说明。
[0149]
在真空输送室,产生从吹扫气体的供给侧去往排气侧的气流气氛,但是在真空输送室大的情况下,吹扫气体的气流弱,颗粒排出至排气口需要花费较多时间。因此,清洁时间变长。此外,由于吹扫气体的气流弱,所以在真空输送室内出现吹扫气体所引起的冲击波不能到达的地方。因此,期待使吹扫气体所引起的冲击波充满整个真空输送室,并且缩短真空输送室的清洁时间。
[0150]
[去往vtm11的配管系统的详细情况]
[0151]
接着,对第2实施方式的基片处理装置中,与变形例1的基片处理装置1不同之处进行说明。在第2实施方式的vtm11,mfc91例如对于进气口33~41,在阀94a~94i打开时,分别控制吹扫气体的流量以使它们成为约500sccm以上的流量。此外,在配管56设置有未图示的mfc,对于进气口30,在阀57打开时,控制吹扫气体的流量以使其成为约500sccm以上的流量。另外,进气口30是第一进气口的一个例子。此外,进气口33~41是第二进气口的一个例子。
[0152]
吹扫气体供给源54经由配管56、90,向进气口30、33~41供给吹扫气体。经由配管56、90向进气口30、33~41进行的吹扫气体的供给,是在通常运转时和执行不使用等离子体的清洁也就是nppc(non plasma process cleaning:非等离子体工艺清洁)时进行的。另外,通常运转时,例如从进气口30连续地流动规定流量的吹扫气体。作为吹扫气体,能够使用n2气体。另外,在第2实施方式中,说明nppc执行时的吹扫气体的供给。
[0153]
apc82是作为可变式蝶阀的自动压力控制阀,自动进行vtm11内的压力控制。为了对从进气口30、33~41供给的吹扫气体赋予大的粘性力,例如优选进行压力控制以使得vtm11内的压力成为133pa(1torr)以上。压力控制可以利用tmp83进行排气的同时利用apc82来进行,也可以打开阀85仅利用干式泵84进行排气的同时通过控制吹扫气体的气体流量来进行。未图示的颗粒监视装置连接于阀81的正下方,监视从排气管80通过的排气中所含的颗粒。颗粒监视装置是颗粒检测器的一个例子。另外,在不进行排气中所含的颗粒的监视的情况下,也可以不设置颗粒监视装置。
[0154]
[真空输送室11的清洁方法]
[0155]
接着,对第2实施方式的真空输送室的清洁方法进行说明。另外,在第2实施方式
中,去往vtm11的配管系统使用图8所示的变形例1中的配管系统。图14是表示第2实施方式中的阀开闭时序的一个例子的图。另外,在图14中,对于进气口33~40和所对应的阀94a~94h,以处于相对位置的进气口和阀彼此为一组来使阀进行动作。此外,进气口41和阀94i在图14所示的阀开闭时序中没有使用。另外,在图14中,将阀的打开状态表示为“开”,将关闭状态表示为“闭”。
[0156]
控制装置100在清洁vtm11的情况下,首先控制阀57,使得从处于vtm11的距排气口42最远的位置的第一进气口即进气口30,以规定时间供给吹扫气体。规定时间例如能够为1~5秒。另外,控制装置100在紧接阀81之后设置的未图示的颗粒监视装置检测到阈值以上的颗粒数的情况下,也可以进行vtm11的清洁。
[0157]
控制装置100接下来控制阀94a、94f,使得从位于比进气口30靠llm15侧的第二进气口即进气口33、38的组以规定时间供给吹扫气体。
[0158]
控制装置100从进气口30侧向排气口42侧,同样按照进气口34、37的组、进气口35、36的组、进气口39、40的组的顺序以规定时间供给吹扫气体。即,控制装置100按照阀94b、94e的组、阀94c、94d的组、阀94g、94h的组的顺序,进行阀的开闭控制。由此,在vtm11内从进气口30向排气口42去地产生吹扫气体的粘性流,即使在vtm11大的情况下也能够使吹扫气体的冲击波(物理的振动)充满整个vtm11。此外,因为使vtm11内的颗粒高效地向排气口42侧移动,所以能够缩短vtm11的清洁时间。
[0159]
[实验结果]
[0160]
接着,使用图15至图19说明使用模拟的第2实施方式的实验例。图15至图19是表示第2实施方式的实验结果的一个例子的图。另外,在图15至图19中,在vtm11的外部存在气流溢出的部分,但这只是模拟中的表现上所引起的,实际上并没有从vtm11溢出气流。
[0161]
图15表示从进气口30以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口30附近的vtm11的壁面。另外,认为仅从进气口30供给吹扫气体时,冲击波并不会到达vtm11的排气口42侧的壁面。
[0162]
图16表示从进气口33、38的组以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口33、38附近的vtm11的壁面,并且去往排气口42的吹扫气体的气流变强。
[0163]
图17表示从进气口34、37的组以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口34、37附近的vtm11的壁面,并且吹扫气体不流到进气口30侧,而流向排气口42。
[0164]
图18表示从进气口35、36的组以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口35、36附近的vtm11的壁面,并且吹扫气体不流到进气口30侧,而流向排气口42。
[0165]
图19表示从进气口39、40的组以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口39、40附近的vtm11的壁面,并且吹扫气体在排气口42的附近扩散,不怎么会流到进气口30侧,而流向排气口42。这样,通过从图15至图19依次供给吹扫气体,由于从进气口30向排气口42去的吹扫气体的粘性流,vtm11内的颗粒高效地向排气口42侧移动而被排出。
[0166]
[阀开闭时序的各变形例]
[0167]
在上述的实施方式中,进气口30、进气口33、38的组、进气口34、37的组、进气口35、36的组和进气口39、40的组的吹扫气体的供给时间,设为不重叠的时序,但是也可以以部分的重复或2个组同时供给,关于这种情况下的实施方式,作为变形例4~12进行说明。另外,在变形例4~12中,与第2实施方式同样,对于进气口33~40和所对应的阀94a~94h,以处于相对位置的进气口和阀彼此为一组使阀进行动作。此外,进气口41和阀94i在变形例4~12所示的阀开闭时序中没有使用。另外,变形例4~12中的基片处理装置与上述的第2实施方式的基片处理装置1是同样的,因此省略其重复的结构和动作的说明。
[0168]
[变形例4]
[0169]
图20是表示变形例4的阀开闭时序的一个例子的图。在图20所示的变形例4中,控制装置100在清洁vtm11的情况下,首先控制阀57,使得从处于距vtm11的排气口42最远的位置的第一进气口即进气口30以规定时间供给吹扫气体。
[0170]
控制装置100接下来控制阀94a、94f,使得从进气口33、38的组以规定时间供给吹扫气体。
[0171]
控制装置100控制阀94b、94e的组,使得从进气口30侧向排气口42侧,同样从进气口34、37的组以规定时间供给吹扫气体。
[0172]
控制装置100接下来对于进气口35、36的组和进气口39、40的组,以同时按规定时间供给吹扫气体的方式,将阀94c、94d的组与阀94g、94h的组同步地进行控制。由此,能够抑制来自进气口39、40的组的吹扫气体向进气口30侧流动。此外,能够比第2实施方式缩短清洁时间。
[0173]
[变形例5]
[0174]
图21是表示变形例5的阀开闭时序的一个例子的图。在图21所示的变形例5中,控制装置100在清洁vtm11的情况下,首先控制阀57,使得从处于距vtm11的排气口42最远的位置的第一进气口即进气口30以规定时间供给吹扫气体。
[0175]
控制装置100接下来控制阀94a、94f,使得在进气口30的供给经过规定时间之前,从进气口33、38的组以规定时间供给吹扫气体。即,在来自进气口30的吹扫气体的供给过程中,开始来自进气口33、38的组的吹扫气体的供给。
[0176]
控制装置100接下来控制阀94b、94e的组,使得在进气口33、38的组的供给经过规定时间之前,从进气口34、37的组以规定时间供给吹扫气体。即,在来自进气口33、38的组的吹扫气体的供给过程中,开始来自进气口34、37的组的吹扫气体的供给。
[0177]
控制装置100接下来控制阀94c、94d的组,使得在进气口34、37的组的供给经过规定时间之前,从进气口35、36的组以规定时间供给吹扫气体。即,在来自进气口34、37的组的吹扫气体的供给过程中,开始来自进气口35、36的组的吹扫气体的供给。
[0178]
控制装置100接下来控制阀94g、94h的组,使得在进气口35、36的组的供给经过规定时间之前,从进气口39、40的组以规定时间供给吹扫气体。即,在来自进气口35、36的组的吹扫气体的供给过程中,开始来自进气口39、40的组的吹扫气体的供给。由此,粘性流从进气口30侧向排气口42侧连续地流动,因此颗粒容易去往排气口42,能够减少返回进气口30侧的颗粒。此外,因为供给吹扫气体的时间重叠,所以能够更加缩短清洁时间。
[0179]
[变形例6]
[0180]
图22是表示变形例6的阀开闭时序的一个例子的图。图22所示的变形例6是反复进
行变形例5的阀开闭时序的情况。控制装置100在清洁vtm11的情况下,首先控制阀57,使得从处于距vtm11的排气口42最远的位置的第一进气口即进气口30以规定时间供给吹扫气体。
[0181]
控制装置100控制阀94a、94f,使得在进气口30的供给经过规定时间之前,从进气口33、38的组以规定时间供给吹扫气体。即,在来自进气口30的吹扫气体的供给过程中,开始来自进气口33、38的组的吹扫气体的供给。以下,与变形例5同样,控制装置100使来自进气口33、38的组、进气口34、37的组、进气口35、36的组和进气口39、40的组的吹扫气体的供给重叠各规定时间地执行。
[0182]
控制装置100在来自进气口39、40的组的吹扫气体的规定时间的供给完成时,再次按进气口30、进气口33、38的组、进气口34、37的组、进气口35、36的组和进气口39、40的组的顺序,使各规定时间重叠地执行吹扫气体的供给。另外,从进气口30到进气口39、40的组的一系列的阀开闭时序的重复次数没有限定。在设置有颗粒监视装置的情况下,即使在通过一次的阀开闭时序颗粒的量并未低于基准值的情况下,也反复进行一系列的阀开闭时序,在颗粒的量低于基准值的时刻结束。在没有设置颗粒监视装置的情况下,也可以将一系列的阀开闭时序反复进行预先确定的次数而结束。
[0183]
[变形例7]
[0184]
图23是表示变形例7的阀开闭时序的一个例子的图。图23所示的变形例7是对于变形例5的阀开闭时序中,进气口35、36的组和进气口39、40的组,以同时按规定时间供给吹扫气体的方式进行控制的情况。即,变形例7是变形例4与变形例5的组合的模式,因此省略其详细的说明。在变形例7中,能够抑制来自进气口39、40的组的吹扫气体向进气口30侧流动。此外,在变形例7中,能够更加缩短清洁时间。
[0185]
[变形例8]
[0186]
图24是表示变形例8的阀开闭时序的一个例子的图。变形例8是将变形例7的阀开闭时序与变形例6一样地重复的情况。变形例8与变形例6同样,一系列的阀开闭时序的重复次数没有限定。在设置有颗粒监视装置的情况下,即使在通过一次的阀开闭时序颗粒的量并未低于基准值的情况下,也通过反复进行一系列的阀开闭时序,在颗粒的量低于基准值的时刻结束。在没有设置颗粒监视装置的情况下,也可以将一系列的阀开闭时序反复进行预先确定的次数而结束。
[0187]
[变形例9]
[0188]
图25是表示变形例9的阀开闭时序的一个例子的图。在图25所示的变形例9中,控制装置100在清洁vtm11的情况下,首先控制阀57,使得从处于距vtm11的排气口42最远的位置的第一进气口即进气口30以规定时间供给吹扫气体。控制装置100将进气口30的吹扫气体的规定时间的供给重复规定次数,例如3次。
[0189]
控制装置100接下来控制阀94a、94f,使得从进气口33、38的组以规定时间供给吹扫气体。控制装置100将进气口33、38的组的吹扫气体的规定时间的供给重复规定次数,例如3次。
[0190]
控制装置100从进气口30侧向排气口42侧,同样地按进气口34、37的组、进气口35、36的组、进气口39、40的组的顺序将吹扫气体的规定时间的供给分别重复规定次数,例如3次。即,控制装置100按阀94b、94e的组、阀94c、94d的组、阀94g、94h的组的顺序,将阀的开闭
控制分别重复规定次数。由此,能够使通过一次的吹扫气体的冲击波未剥离的颗粒剥离。另外,也可以将变形例9的一系列的阀开闭时序与变形例6同样地重复。
[0191]
[变形例10]
[0192]
图26是表示变形例10的阀开闭时序的一个例子的图。图26所示的变形例10是对于变形例9的阀开闭时序中,进气口35、36的组和进气口39、40的组的吹扫气体的规定时间的供给,以同时执行规定次数的重复的方式进行控制的情况。即,变形例10是变形例4与变形例9的组合的模式,因此省略其详细的说明。由此,能够使通过一次的吹扫气体的冲击波未剥离的颗粒剥离,并且能够比变形例9缩短清洁时间。另外,也可以将变形例10的一系列的阀开闭时序与变形例6同样地重复。
[0193]
[变形例11]
[0194]
图27是表示变形例11的阀开闭时序的一个例子的图。变形例11是将第2实施方式的阀开闭时序与变形例6同样地重复的情况。变形例11与变形例6同样,一系列的阀开闭时序的重复次数没有限定。在设置有颗粒监视装置的情况下,即使在通过一次的阀开闭时序颗粒的量并未低于基准值的情况下,也通过反复进行一系列的阀开闭时序,在颗粒的量低于基准值的时刻结束。在没有设置颗粒监视装置的情况下,也可以将一系列的阀开闭时序反复进行预先确定的次数而结束。
[0195]
[变形例12]
[0196]
图28是表示变形例12的阀开闭时序的一个例子的图。变形例12是将变形例4的阀开闭时序与变形例11同样地重复的情况。变形例12与变形例11同样,一系列的阀开闭时序的重复次数没有限定。在设置有颗粒监视装置的情况下,即使在通过一次的阀开闭时序颗粒的量并未低于基准值的情况下,也通过反复进行一系列的阀开闭时序,在颗粒的量低于基准值的时刻结束。在没有设置颗粒监视装置的情况下,也可以将一系列的阀开闭时序反复进行预先确定的次数而结束。由此,能够比变形例11缩短清洁时间。
[0197]
另外,在上述的第2实施方式和变形例4~12中,对于进气口30和进气口33、38的组,分别单独地控制阀开闭时序,但是并不限定于此。例如,也可以对于进气口30和进气口33、38的组,以同时按规定时间供给吹扫气体的方式进行控制。
[0198]
[变形例13]
[0199]
在上述的第2实施方式和变形例4~12中,经由配管56和阀57进行对进气口30的吹扫气体的供给,不过也可以经由配管59和阀62进行,关于这种情况下的实施方式,作为变形例13说明。另外,变形例13的基片处理装置与上述的第2实施方式的基片处理装置1是同样的,因此省略其重复的结构和动作的说明。
[0200]
图29是表示变形例13的去往真空输送室的配管系统的一个例子的图。如图29所示,在变形例13中,与第2实施方式比较,不设置配管56和阀57,而将配管58连接于调节器55。对进气口30的吹扫气体的供给是经由配管59和阀62并利用配管59a进行的。
[0201]
图30是表示变形例13的阀开闭时序的一个例子的图。另外,在图30,进气口30、31、32、39、40通过对应的阀62被同时控制吹扫气体的供给。此外,对于进气口33~40和所对应的阀94a~94h,以处于相对位置的进气口和阀彼此为一组使阀进行动作。此外,进气口41和阀94i在图30所示的阀开闭时序中没有使用。另外,在图30,将阀的打开状态表示为“开”,将关闭状态表示为“闭”。
[0202]
控制装置100在清洁vtm11的情况下,首先控制阀62,使得从处于距vtm11的排气口42最远的位置的进气口30~32和llm15侧的进气口39、40,分别以规定时间供给吹扫气体。在这种情况下,进气口30~32相当于第一进气口。规定时间例如能够为1~5秒。另外,控制装置100在紧接阀81之后设置的未图示的颗粒监视装置检测到阈值以上的颗粒数的情况下,也可以进行vtm11的清洁。
[0203]
控制装置100接下来控制阀94a、94f,使得从位于比进气口30靠llm15侧的第二进气口即进气口33、38的组以规定时间供给吹扫气体。
[0204]
控制装置100从进气口30侧向排气口42侧,同样按照进气口34、37的组、进气口35、36的组、进气口39、40的组的顺序以规定时间供给吹扫气体。即,控制装置100按照阀94b、94e的组、阀94c、94d的组、阀94g、94h的组的顺序,进行阀的开闭控制。由此,在vtm11内从进气口30向排气口42去地产生吹扫气体的粘性流,在vtm11大的情况下也能够使吹扫气体的冲击波(物理的振动)充满整个vtm11。此外,因为使vtm11内的颗粒高效地向排气口42侧移动,所以能够缩短vtm11的清洁时间。
[0205]
[实验结果]
[0206]
接着,使用图31至图35说明使用了模拟的变形例的实验例。图31至图35是表示变形例13的实验结果的一个例子的图。另外,在图31至图35中,在vtm11的外部存在气流溢出的部分,不过这只是模拟中的表现上所引起的,实际上并没有从vtm11溢出气流。
[0207]
图31表示从进气口30~32、39、40以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,vtm11内的吹扫气体的流动变得均匀,在连接有pm13的面附近也有吹扫气体的气流。
[0208]
图32表示从进气口33、38的组以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口33、38附近的vtm11的壁面,并且去往排气口42的吹扫气体的气流变强。
[0209]
图33表示从进气口34、37的组以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口34、37附近的vtm11的壁面,并且吹扫气体不流到进气口30侧,而流向排气口42。
[0210]
图34表示从进气口35、36的组以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口35、36附近的vtm11的壁面,并且吹扫气体不流到进气口30侧,而流向排气口42。
[0211]
图35表示从进气口39、40的组以规定时间供给吹扫气体的情况下的压力分布和吹扫气体的气流。可知在这种情况下,冲击波到达进气口39、40附近的vtm11的壁面,并且吹扫气体在排气口42的附近扩散,不怎么会流到进气口30侧,而流向排气口42。这样,通过从图31至图35地依次供给吹扫气体,由于从进气口30向排气口42去的吹扫气体的粘性流,vtm11内的颗粒高效地向排气口42侧移动而被排出。
[0212]
[阀开闭时序的各变形例]
[0213]
在上述的实施方式中,进气口30~32、39、40的组、进气口33、38的组、进气口34、37的组、进气口35、36的组和进气口39、40的组的吹扫气体的供给时间,设为不重叠的时序,但是也可以以部分的重复或2个组同时供给,关于这种情况下的实施方式,作为变形例14~22进行说明。另外,在变形例14~22中,对于进气口30~32、39、40和所对应的阀62,作为一个
组使阀进行动作。此外,与变形例13同样,对于进气口33~40和所对应的阀94a~94h,以处于相对位置的进气口和阀彼此为一组使阀进行动作。进一步,进气口41和阀94i在变形例14~22所示的阀开闭时序中没有使用。另外,变形例14~22中的基片处理装置与上述的变形例13的基片处理装置1是同样的,因此省略其重复的结构和动作的说明。
[0214]
[变形例14]
[0215]
图36是表示变形例14的阀开闭时序的一个例子的图。在图36所示的变形例14中,控制装置100在清洁vtm11的情况下,首先控制阀62,使得从处于距vtm11的排气口42最远的位置的进气口30~32和最靠近llm15侧的进气口39、40以规定时间供给吹扫气体。
[0216]
控制装置100接下来控制阀94a、94f,使得从进气口33、38的组以规定时间供给吹扫气体。
[0217]
控制装置100控制阀94b、94e的组,使得从进气口30侧向排气口42侧,同样从进气口34、37的组以规定时间供给吹扫气体。
[0218]
控制装置100接下来对于进气口35、36的组和进气口39、40的组,以同时按规定时间供给吹扫气体的方式,将阀94c、94d的组与阀94g、94h的组同步地进行控制。由此,能够抑制来自进气口39、40的组的吹扫气体向进气口30侧流动。此外,能够比变形例13缩短清洁时间。
[0219]
[变形例15]
[0220]
图37是表示变形例15的阀开闭时序的一个例子的图。在图37所示的变形例15中,控制装置100在清洁vtm11的情况下,首先控制阀62,使得从处于距vtm11的排气口42最远的位置的进气口30~32和最靠近llm15侧的进气口39、40以规定时间供给吹扫气体。
[0221]
控制装置100接下来控制阀94a、94f,使得在进气口30~32、39、40的组的供给经过规定时间之前,从进气口33、38的组以规定时间供给吹扫气体。即,在来自进气口30~32、39、40的组的吹扫气体的供给过程中,开始来自进气口33、38的组的吹扫气体的供给。
[0222]
控制装置100接下来控制阀94b、94e的组,使得在进气口33、38的组的供给经过规定时间之前,从进气口34、37的组以规定时间供给吹扫气体。即,在来自进气口33、38的组的吹扫气体的供给过程中,开始来自进气口34、37的组的吹扫气体的供给。
[0223]
控制装置100接下来控制阀94c、94d的组,使得在进气口34、37的组的供给经过规定时间之前,从进气口35、36的组以规定时间供给吹扫气体。即,在来自进气口34、37的组的吹扫气体的供给过程中,开始来自进气口35、36的组的吹扫气体的供给。
[0224]
控制装置100接下来控制阀94g、94h的组,使得在进气口35、36的组的供给经过规定时间之前,从进气口39、40的组以规定时间供给吹扫气体。即,在来自进气口35、36的组的吹扫气体的供给过程中,开始来自进气口39、40的组的吹扫气体的供给。由此,粘性流从进气口30侧向排气口42侧连续流动,因此颗粒容易去往排气口42,能够减少返回进气口30侧的颗粒。此外,因为供给吹扫气体的时间重叠,所以能够更加缩短清洁时间。
[0225]
[变形例16]
[0226]
图38是表示变形例16的阀开闭时序的一个例子的图。图38所示的变形例16是反复进行变形例15的阀开闭时序的情况。控制装置100在清洁vtm11的情况下,首先控制阀62,使得从处于距vtm11的排气口42最远的位置的进气口30~32和最靠近llm15侧的进气口39、40以规定时间供给吹扫气体。
[0227]
控制装置100控制阀94a、94f,使得在进气口30~32、39、40的组的供给经过规定时间之前,从进气口33、38的组以规定时间供给吹扫气体。即,在来自进气口30的吹扫气体的供给过程中,开始来自进气口33、38的组的吹扫气体的供给。以下,与变形例15同样,控制装置100使来自进气口33、38的组、进气口34、37的组、进气口35、36的组和进气口39、40的组的吹扫气体的供给重叠各规定时间地执行。
[0228]
控制装置100在来自进气口39、40的组的吹扫气体的规定时间的供给完成时,再次按进气口30~32、39、40的组、进气口33、38的组、进气口34、37的组、进气口35、36的组和进气口39、40的组的顺序,使各规定时间重叠地执行吹扫气体的供给。另外,从进气口30~32、39、40的组到进气口39、40的组的一系列的阀开闭时序的重复次数没有限定。在设置有颗粒监视装置的情况下,即使在通过一次的阀开闭时序颗粒的量并未低于基准值的情况下,也反复进行一系列的阀开闭时序,在颗粒的量低于基准值的时刻结束。在没有设置颗粒监视装置的情况下,也可以将一系列的阀开闭时序反复进行预先确定的次数而结束。
[0229]
[变形例17]
[0230]
图39是表示变形例17的阀开闭时序的一个例子的图。图39所示的变形例17是对于变形例15的阀开闭时序中,进气口35、36的组和进气口39、40的组,以同时按规定时间供给吹扫气体的方式进行控制的情况。即,变形例17是变形例14与变形例15的组合的模式,因此省略其详细的说明。在变形例17中,能够抑制来自进气口39、40的组的吹扫气体向进气口30侧流动。此外,在变形例17中,能够更加缩短清洁时间。
[0231]
[变形例18]
[0232]
图40是表示变形例18的阀开闭时序的一个例子的图。变形例18是将变形例17的阀开闭时序与变形例16同样地重复的情况。变形例18与变形16同样,一系列的阀开闭时序的重复次数没有限定。在设置有颗粒监视装置的情况下,即使在通过一次的阀开闭时序颗粒的量并未低于基准值的情况下,也通过反复进行一系列的阀开闭时序,在颗粒的量低于基准值的时刻结束。在没有设置颗粒监视装置的情况下,也可以将一系列的阀开闭时序反复进行预先确定的次数而结束。
[0233]
[变形例19]
[0234]
图41是表示变形例19的阀开闭时序的一个例子的图。在图41所示的变形例19中,控制装置100在清洁vtm11的情况下,首先控制阀62,使得从处于距vtm11的排气口42最远的位置的进气口30~32和最靠近llm15侧的进气口39、40以规定时间供给吹扫气体。控制装置100将进气口30~32、39、40的组的吹扫气体的规定时间的供给重复规定次数,例如3次。
[0235]
控制装置100接下来控制阀94a、94f,使得从进气口33、38的组以规定时间供给吹扫气体。控制装置100将进气口33、38的组的吹扫气体的规定时间的供给重复规定次数,例如3次。
[0236]
控制装置100从进气口30侧向排气口42侧,同样地按进气口34、37的组、进气口35、36的组、进气口39、40的组的顺序将吹扫气体的规定时间的供给分别重复规定次数,例如3次。即,控制装置100按阀94b、94e的组、阀94c、94d的组、阀94g、94h的组的顺序,将阀的开闭控制分别重复规定次数。由此,能够使通过一次的吹扫气体的冲击波未剥离的颗粒剥离。另外,也可以将变形例19的一系列的阀开闭时序与变形例16同样地重复。
[0237]
[变形例20]
[0238]
图42是表示变形例20的阀开闭时序的一个例子的图。图42所示的变形例20是对于变形例19的阀开闭时序中,进气口35、36的组和进气口39、40的组的吹扫气体的规定时间的供给,以同时执行规定次数的重复的方式进行控制的情况。即,变形例20是变形例14与变形例19的组合的模式,因此省略其详细的说明。由此,能够使通过一次的吹扫气体的冲击波未剥离的颗粒剥离,并且能够比变形例19缩短清洁时间。另外,也可以将变形例20的一系列的阀开闭时序与变形例16同样地重复。
[0239]
[变形例21]
[0240]
图43是表示变形例21的阀开闭时序的一个例子的图。变形例21是将变形例13的阀开闭时序与变形例16同样地重复的情况。变形例21与变形例16同样,一系列的阀开闭时序的重复次数没有限定。在设置有颗粒监视装置的情况下,即使在通过一次的阀开闭时序颗粒的量并未低于基准值的情况下,也通过反复进行一系列的阀开闭时序,在颗粒的量低于基准值的时刻结束。在没有设置颗粒监视装置的情况下,也可以将一系列的阀开闭时序反复进行预先确定的次数而结束。
[0241]
[变形例22]
[0242]
图44是表示变形例22的阀开闭时序的一个例子的图。变形例22是将变形例14的阀开闭时序与变形例21同样地重复的情况。变形例22与变形例21同样,一系列的阀开闭时序的重复次数没有限定。在设置有颗粒监视装置的情况下,即使在通过一次的阀开闭时序颗粒的量并未低于基准值的情况下,也通过反复进行一系列的阀开闭时序,在颗粒的量低于基准值的时刻结束。在没有设置颗粒监视装置的情况下,也可以将一系列的阀开闭时序反复进行预先确定的次数而结束。由此,能够比变形例21缩短清洁时间。
[0243]
另外,在上述的第2实施方式和变形例4~22中,利用吹扫气体的粘性流和冲击波来清扫颗粒,但并不限定于此。例如,也可以通过向设置在机械臂12内的电极施加高电压,使机械臂12的叉部靠近vtm11的内面,从而使vtm11的内面与叉部之间产生静电场,使静电的应力例如麦克斯韦(maxwell)应力作用于vtm11的内面。所施加的高电压例如是交替施加极性不同的高电压,例如 1kv和-1kv。此外,所施加的高电压的绝对值例如能够在1kv~5kv的范围内。另外,所施加的高电压也可以取代极性不同的高电压,而充分进行高电压的接通/关闭。由此,沉积于vtm11的内面的颗粒的附着力弱,颗粒脱离。即,控制装置100能够通过使机械臂12的叉部移动至所期望的位置,使沉积于vtm11的内面的所期望的位置的颗粒剥离。例如,在变形例6、11、12、16、21、22那样反复进行一系列的阀开闭时序的情况下,在第1次的时序,与吹扫气体的供给相应地依次使叉部接近进气口33、34、35的附近的vtm11的内面。此外,在第2次的时序,与吹扫气体的供给相应地依次使叉部接近进气口38、37、36的附近的vtm11的内面。由此,能够提高清洁的效果。
[0244]
此外,在上述的变形例13~22中,对于进气口30~32、39、40的组和进气口33、38的组,分别单独地控制阀开闭时序,但是并不限定于此。例如,也可以对于进气口30~32、39、40的组和进气口33、38的组,以同时按规定时间供给吹扫气体的方式进行控制。
[0245]
以上,根据第1实施方式,基片处理装置1包括:真空输送室11,其具有顶面、与顶面相对的底面以及顶面与底面之间的侧面,侧面具有第一侧面和与第一侧面相对的第二侧面;配置在真空输送室内的用于输送基片(晶片)的输送机械臂(机械臂12);与第一侧面连接的负载锁定模块15;配管(56、58),其与吹扫气体供给源54连接,向真空输送室11内供给
吹扫气体;至少1个进气口(30),其设置在第二侧面的附近的顶面,与配管连接;和至少1个排气口42,其设置在真空输送室11的第一侧面的附近的底面,与用于对供给到真空输送室的吹扫气体进行排气的排气泵连接。其结果是,能够通过消除气体的滞留来抑制颗粒积存。
[0246]
此外,根据第1实施方式,第二侧面的附近是指,在从第一侧面到第二侧面的方向上,将顶面从第一侧面到第二侧面进行8等分时,距第二侧面最近的顶面的部分。其结果是,能够通过消除气体的滞留来抑制颗粒积存。
[0247]
此外,根据第1实施方式,进气口设置有多个。其结果是,能够通过消除气体的滞留来抑制颗粒积存。
[0248]
此外,根据第1实施方式,进气口(30~32、39、40)还设置在第一侧面的附近的顶面。其结果是,能够通过消除气体的滞留来抑制颗粒积存。
[0249]
此外,根据第1实施方式,进气口还设置在负载锁定模块15与真空输送室11之间所设置的第一闸门(16)的连接部、以及真空输送室11与处理模块13之间所设置的第二闸门(14)的连接部14a。其结果是,能够通过消除了含有气体成分的吹扫气体的滞留来抑制颗粒积存。
[0250]
此外,根据第1实施方式,配管包括:第一配管(59),其经由控制吹扫气体的流量的第一质量流量控制器(mfc60),向设置在第一侧面的附近的顶面(39、40)和第二侧面的附近的顶面(30~32)的进气口分别供给吹扫气体;第二配管(63),其经由控制吹扫气体的流量的第二质量流量控制器(mfc64),向设置在第一闸门的连接部的进气口(39~41)分别供给吹扫气体;和第三配管(58),其经由控制吹扫气体的流量的第三质量流量控制器(mfc68),向设置在第二闸门的连接部14a的进气口(33~38)分别供给吹扫气体。其结果是,真空输送室11内的吹扫气体的流动变得均匀,消除了含有气体成分的吹扫气体的滞留,由此能够抑制颗粒积存。
[0251]
此外,根据第1实施方式,第一质量流量控制器在真空输送室11为待机状态或基片的输送中的情况下、第一闸门打开的情况下和第二闸门打开的情况下,控制流量以使得连续地供给吹扫气体。其结果是,能够使真空输送室11内的吹扫气体的气流均匀。
[0252]
此外,根据第1实施方式,第二质量流量控制器在真空输送室11为待机状态或基片的输送中的情况下和第二闸门打开的情况下,控制流量以使得停止供给吹扫气体,在第一闸门打开的情况下,控制流量以使得停止供给吹扫气体或通过渐变控制来供给吹扫气体。其结果是,能够降低负载锁定模块15侧的气氛的影响。
[0253]
此外,根据第1实施方式,第三质量流量控制器在真空输送室11为待机状态或基片的输送中的情况下和第一闸门打开的情况下,控制流量以使得停止供给吹扫气体,在第二闸门打开的情况下,控制流量以使得通过渐变控制来供给吹扫气体。其结果是,能够抑制真空输送室11内的气流的紊乱,并且能够降低处理模块13侧的气氛的影响。
[0254]
此外,根据变形例1,配管包括:第一配管(59),其经由控制吹扫气体的流量的第一质量流量控制器(mfc60),向设置在第一侧面的附近的顶面(39、40)和第二侧面的附近的顶面(30~32)的进气口分别供给吹扫气体;和第四配管(90),其经由控制吹扫气体的流量的第四质量流量控制器(mfc91),向设置在第一闸门的连接部和第二闸门的连接部14a的进气口(33~41)分别供给吹扫气体。其结果是,真空输送室11内的吹扫气体的流动变得均匀,消除了含有气体成分的吹扫气体的滞留,由此能够抑制颗粒积存。此外,能够比上述的实施方
式减少配管系统。
[0255]
此外,根据变形例1,第一质量流量控制器在真空输送室11为待机状态或基片的输送中的情况下、第一闸门打开的情况下和第二闸门打开的情况下,控制流量以使得连续地供给吹扫气体。其结果是,能够使真空输送室11内的吹扫气体的气流均匀。
[0256]
此外,根据第1实施方式,第四质量流量控制器在真空输送室11为待机状态或基片的输送中的情况下,控制流量以使得停止供给吹扫气体,在第一闸门打开的情况下和第二闸门打开的情况下,控制流量以使得通过渐变控制来供给吹扫气体。其结果是,能够抑制真空输送室11内的气流的紊乱,并且能够降低处理模块13和负载锁定模块15侧的气氛的影响。
[0257]
此外,根据变形例2,配管包括:第五配管(59),其经由控制吹扫气体的流量的第一节流孔(95)和第一阀(62),向设置在第一侧面的附近的顶面(39、40)和第二侧面的附近的顶面(30~32)的进气口分别供给吹扫气体;和第四配管(90),其经由控制吹扫气体的流量的第四质量流量控制器(mfc91),向设置在第一闸门的连接部和第二闸门的连接部14a的进气口(33~41)分别供给吹扫气体。其结果是,真空输送室11内的吹扫气体的流动变得均匀,消除了含有气体成分的吹扫气体的滞留,由此能够抑制颗粒积存。此外,能够比上述的实施方式减少配管系统。进一步,能够比变形例1减少成本。
[0258]
此外,根据变形例2,第一节流孔和第一阀在真空输送室11为待机状态或基片的输送中的情况下、第一闸门打开的情况下和第二闸门打开的情况下,使得供给吹扫气体。其结果是,能够使真空输送室11内的吹扫气体的气流均匀。
[0259]
此外,根据变形例2,第四质量流量控制器在真空输送室11为待机状态或基片的输送中的情况下,控制流量以使得停止供给吹扫气体,在第一闸门打开的情况下和第二闸门打开的情况下,控制流量以使得通过渐变控制来供给吹扫气体。其结果是,能够抑制真空输送室11内的气流的紊乱,并且能够降低处理模块13和负载锁定模块15侧的气氛的影响。
[0260]
此外,根据变形例3,配管包括:第一配管(59),其经由控制吹扫气体的流量的第一质量流量控制器(mfc60),向设置在第一侧面的附近的顶面(39、40)和第二侧面的附近的顶面(30~32)的进气口分别供给吹扫气体;和第六配管(96),其经由控制吹扫气体的流量的第二节流孔(97a~97i)和第二阀(94a~94i),向设置在第一闸门的连接部和第二闸门的连接部14a的进气口分别供给吹扫气体,其中,第二节流孔(97a~97i)和第二阀(94a~94i)是对于设置在第一闸门的连接部和第二闸门的连接部14a的进气口(33~41)的每一进气口设置的。其结果是,真空输送室11内的吹扫气体的流动变得均匀,消除了含有气体成分的吹扫气体的滞留,由此能够抑制颗粒积存。此外,能够比上述的实施方式减少配管系统。进一步,能够比变形例1减少成本。
[0261]
此外,根据变形例3,第一质量流量控制器在真空输送室11为待机状态或基片的输送中的情况下、第一闸门打开的情况下和第二闸门打开的情况下,控制流量以使得连续地供给吹扫气体。其结果是,能够使真空输送室11内的吹扫气体的气流均匀。
[0262]
此外,根据变形例3,多个第二节流孔和第二阀在真空输送室11为待机状态或基片的输送中的情况下,控制流量以使得停止供给吹扫气体,在第一闸门打开的情况下和第二闸门打开的情况下,使得连续地供给吹扫气体。其结果是,能够抑制真空输送室11内的气流的紊乱,并且能够降低处理模块13和负载锁定模块15侧的气氛的影响。
[0263]
此外,根据第2实施方式,真空输送室包括顶面、与顶面相对的底面以及顶面与底面之间的侧面,侧面包括第一侧面和与第一侧面相对的第二侧面,控制装置100执行以下步骤,即:步骤a,一边从设置在第一侧面的附近的底面的排气口42,对真空输送室11内进行排气,一边从位于第二侧面的附近的顶面且位于距排气口42最远的位置的第一进气口(30),以规定时间供给吹扫气体;和步骤b,一边从排气口42对真空输送室11内进行排气,一边从位于比第一进气口靠第一侧面侧的第二进气口(33~40),以规定时间供给吹扫气体。其结果是,能够使吹扫气体的冲击波充满整个真空输送室11,并且能够缩短真空输送室11的清洁时间。
[0264]
应该认为本次公开的实施方式在所有方面均为例示而不具限制性。实际上,上述的各实施方式也可以不脱离所附的权利请求的范围及其主旨地以各种各样的方式省略、替换、变更。
[0265]
此外,在上述的各实施方式中,作为吹扫气体使用了n2,但是并不限定于此。例如,也可以作为不活泼气体使用he、ne、ar气体等稀有气体。
[0266]
以上,关于上述的各实施方式,进一步公开以下的附记。
[0267]
(附记1)一种真空输送室的清洁方法,其中
[0268]
所述空输送室具有顶面、与所述顶面相对的底面以及所述顶面与所述底面之间的侧面,所述侧面具有第一侧面和与所述第一侧面相对的第二侧面,
[0269]
所述真空输送室的清洁方法具有:
[0270]
步骤a,一边从设置在所述第一侧面的附近的所述底面的排气口,对所述真空输送室内进行排气,一边从位于所述第二侧面的附近的所述顶面且位于距所述排气口最远的位置的第一进气口,以规定时间供给吹扫气体;和
[0271]
步骤b,一边从所述排气口对所述真空输送室内进行排气,一边从位于比所述第一进气口靠所述第一侧面侧的第二进气口,以所述规定时间供给所述吹扫气体。
[0272]
(附记2)附记1中记载的真空输送室的清洁方法,
[0273]
具有反复进行所述步骤a和所述步骤b的步骤c。
[0274]
(附记3)附记1中记载的真空输送室的清洁方法,
[0275]
具有反复进行规定次数的所述步骤a之后,反复进行所述规定次数的所述步骤b的步骤d。
[0276]
(附记4)附记1或2中记载的真空输送室的清洁方法,其中,
[0277]
所述步骤b在所述步骤a中经过所述规定时间之前,开始所述吹扫气体的供给。
[0278]
(附记5)附记1~4的任一项中记载的真空输送室的清洁方法,其中,
[0279]
所述步骤a和所述步骤b中,控制从所述排气口的排气或吹扫气体的流量,以使得所述真空输送室内的压力成为133pa以上。
[0280]
(附记6)附记1~5的任一项中记载的真空输送室的清洁方法,其中,
[0281]
所述步骤b在向所述排气口侧去设有多个所述第二进气口的情况下,从所述第二侧面侧的所述第二进气口起依次以所述规定时间供给所述吹扫气体。
[0282]
(附记7)附记6中记载的真空输送室的清洁方法,其中,
[0283]
所述步骤b在所述吹扫气体供给过程中的所述第二进气口的供给经过所述规定时间之前,开始从下一个所述第二进气口的所述吹扫气体的供给。
[0284]
(附记8)附记1~7的任一项中记载的真空输送室的清洁方法,其中,
[0285]
所述步骤a和所述步骤b在所述规定时间的期间,向设置在所述真空输送室内的真空输送机械臂内的电极施加高电压。
[0286]
(附记9)附记8中记载的真空输送室的清洁方法,其中,
[0287]
所述高电压的绝对值为1~5kv的范围。
[0288]
(附记10)附记1~9的任一项中记载的真空输送室的清洁方法,其中,
[0289]
具有在设置于与所述排气口连接的排气路线上的颗粒检测器检测出阈值以上的颗粒数的情况下,执行所述步骤a和所述步骤b的步骤e。
[0290]
(附记11)一种基片处理装置,其包括:
[0291]
真空输送室,其具有顶面、与所述顶面相对的底面以及所述顶面与所述底面之间的侧面,所述侧面具有第一侧面和与所述第一侧面相对的第二侧面;和
[0292]
控制部,
[0293]
该控制部构成为能够控制所述基片处理装置,以使得a)一边从设置在所述第一侧面的附近的所述底面的排气口,对所述真空输送室内进行排气,一边从位于所述第二侧面的附近的所述顶面且位于距所述排气口最远的位置的第一进气口,以规定时间供给吹扫气体;和
[0294]
该控制部构成为能够控制所述基片处理装置,以使得b)一边从所述排气口对所述真空输送室内进行排气,一边从位于比所述第一进气口靠所述第一侧面侧的第二进气口,以所述规定时间供给所述吹扫气体。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。