1.本发明涉及机器人标定技术领域,具体涉及用于机器人自标定的激光光线 间距测量方法。
背景技术:
2.工业机器人由于机械臂构件的制造精度、机器手臂构件装配与安装、参考 坐标系与实际坐标系的误差、非平行轴误差、机械手臂运动学参数等几何误差 导致工业机器人绝对定位精度低。其中又以机械手臂的运动学参数影响最大, 因此需要对工业机器人运动学参数进行标定。目前通过第三方测量装备精确测 量机器人末端绝对定位误差进行标定,虽然精度高,但价格昂贵,操作复杂。
3.中国专利公开号“cn 10968341 a”,专利名称为“一种工业机器人零位自 标定方法”,提出了一种利用一个位置敏感器件(psd)中心点作为机器人末端 约束,通过求解激光线所在直线方程,联立方程组求解直线交点,计算各光斑 坐标与所有光斑中心点之间间距进行测量的方法。该方法存在的不足:重复对 准psd中心点难度较大,效率低。
技术实现要素:
4.本发明为了解决现有技术中激光光斑坐标测量方法存在的效率低问题,提出 了一种用于机器人自标定的激光光线间距测量方法,采用4个psd作为激光光 线约束,使激光光斑对准psd中心区域,完成激光光线间距测量。
5.用于机器人自标定的激光光线间距测量方法,包括以下步骤:
6.步骤1、获取激光光线在各个psd上投影光斑的坐标;
7.设psd1坐标系为{o1},psd2坐标系为{o2},psd3坐标系为{o3},psd4坐标 系为{o4},{o1}、{o2}、{o3}、{o4}刚性固接在一起;系{o2}相对于系{o1}的位姿 转换矩阵为系{o3}相对于系{o1}的位姿转换矩阵为系{o4}相对于系{o1} 的位姿转换矩阵为是已知的;使激光光线lo1经由psd1中心 区域反射至psd2中心区域,此时入射到系{o1}下的光斑坐标为p1(x1,y1,0),反 射到系{o2}下光斑坐标为p2(x2,y2,0);使激光光线lo3经由psd3中心区域反射至 psd4中心区域,此时入射到系{o3}下光斑坐标为p3(x3,y3,0),反射到系{o4}下光 斑坐标为p4(x4,y4,0);
8.步骤2、转换各激光光斑坐标到系{o1}下;
9.利用公式(1)求解p2在系{o1}下的坐标p
21
(x
21
,y
21
,z
21
);
10.[0028][0029]
则p
41
与p
′
41
所在直线方向向量与平行,即:
[0030][0031]
与在投影和为0,即:
[0032]
(x
′
41
,y
′
41
,z
′
41
)
·
(l
31
,m
31
,n
31
) (x
41
,y
41
,z
41
)
·
(l
31
,m
31
,n
31
)=0
ꢀꢀꢀ
(11)
[0033]
联立(10)、(11)式得式(12),即得p
′
41
(x
′
41
,y
′
41
,z
′
41
);
[0034][0035]
利用(13)式求解lo3单位方向向量
[0036][0037]
联立(12)、(13)式,得lo3所在直线在系{o1}下方程式(14);
[0038][0039]
步骤5、在系{o1}下求解lo1与lo3间距;
[0040]
利用公式(15)得lo1与lo3公垂线方向向量(l
31
,m
31
,n
31
)
[0041][0042]
联立(10)、(14)及(15)式,求解在lo1与lo3公垂线上投影模长,即lo1与lo3在系{o1}下间距d
[0043][0044]
式(16)即在系{o1}下lo1与lo3间距。
[0045]
本发明的有益效果:本方法采用4个刚性固结的psd作为激光光线空间约束,用psd中心区域作为激光光线对准区域,利用入射光斑和反射光斑对称点 确定空间直线,根据空
间直线到直线距离公式求解激光光线间距,实现了激光 光线间距测量,克服了现有技术中难以重复对准psd表面中心点的问题,具有 测量激光光线间距效率更高的优点,可以广泛应用于机器人自标定领域。
附图说明
[0046]
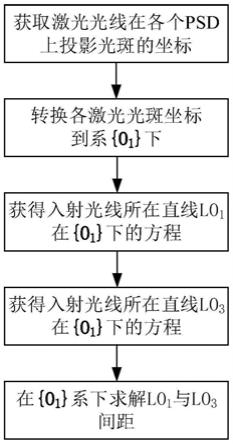
图1:本发明用于机器人自标定的激光光线间距测量方法流程示意图。
[0047]
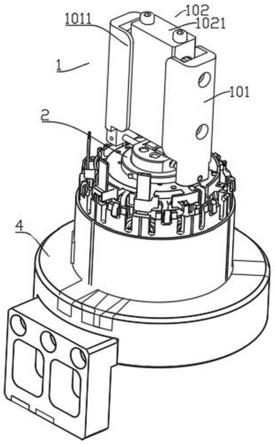
图2:本发明用于机器人自标定的激光光线间距测量方法示意图。
[0048]
图3:本发明所述激光反射光斑关于psd1系{o1}中xoy平面对称点示意图。
具体实施方式
[0049]
下面将结合附图对本发明做进一步详细描述。
[0050]
用于机器人自标定的激光光线间距测量方法,如图1所示,包括以下步骤:
[0051]
步骤1、获取激光光线在各个psd上投影光斑的坐标
[0052]
如图2所示,设psd11坐标系为{o1},psd22坐标系为{o2},psd33坐标系 为{o3},psd44坐标系为{o4},{o1}、{o2}、{o3}、{o4}刚性固接在一起。系{o2} 相对于系{o1}的位姿转换矩阵为系{o3}相对于系{o1}的位姿转换矩阵为系{o4}相对于系{o1}的位姿转换矩阵为是已知的;使激光光 线lo1经由psd11中心区域反射至psd22中心区域,此时入射到系{o1}下的光斑 坐标为p1(x1,y1,0),反射到系{o2}下光斑坐标为p2(x2,y2,0);使激光光线lo3经 由psd33中心区域反射至psd44中心区域,此时入射到系{o3}下光斑坐标为 p3(x3,y3,0),反射到系{o4}下光斑坐标为p4(x4,y4,0)。
[0053]
步骤2、转换各激光光斑坐标到系{o1}下
[0054]
利用公式(1)求解p2在系{o1}下的坐标p
21
(x
21
,y
21
,z
21
)。
[0055][0056]
利用公式(2)求解p3在系{o1}下的坐标p
31
(x
31
,y
31
,z
31
)。
[0057][0058]
利用公式(3)求解p4在系{o1}下的坐标p
41
(x
41
,y
41
,z
41
)。
[0059][0060]
步骤3、获得入射光线所在直线lo1在系{o1}下的方程。
[0061]
如图3所示,设p2关于系{o1}中xoy平面的对称点坐标为p
′
21
(x
′
21
,y
′
21
,z
′
21
), p1与
p
′
21
在lo1上。系{o1}中xoy平面在系{o1}下的单位法向量为则p2与p
′
21
所在直线方向向量与平行,即:
[0062][0063]
向量与在投影和为0,即:
[0064]
(x
21
,y
21
,z
21
)
·
(l1,m1,n1) (x
′
21
,y
′
21
,z
′
21
)
·
(l1,m1,n1)=0
ꢀꢀꢀ
(5)
[0065]
联立(4)、(5)式得式(6),即得p
′
21
(x
′
21
,y
′
21
,z
′
21
)。
[0066][0067]
利用(7)式求解lo1单位方向向量
[0068][0069]
联立(6)、(7)式,得lo1在系{o1}下方程公式(8)。
[0070][0071]
步骤4、获得入射光线所在直线lo3在系{o1}下的方程:
[0072]
设p4关于系{o3}中xoy平面的对称点在系{o1}下坐标为p
′
41
(x
′
41
,y
′
41
,z
′
41
), p3与p
′
41
在lo3上。利用式(9)求解系{o3}中xoy平面在系{o1}下的单位法向量 [0073][0074]
则p
41
与p
′
41
所在直线方向向量与平行,即:
[0075][0076]
与在投影和为0,即:
[0077]
(x
′
41
,y
′
41
,z
′
41
)
·
(l
31
,m
31
,n
31
) (x
41
,y
41
,z
41
)
·
(l
31
,m
31
,n
31
)=0
ꢀꢀꢀ
(11)
[0078]
联立(10)、(11)式得式(12),即得p
′
41
(x
′
41
,y
′
41
,z
′
41
)。
[0079][0080]
利用(13)式求解lo3单位方向向量
[0081][0082]
联立(12)、(13)式,得lo3所在直线在系{o1}下方程式(14)。
[0083][0084]
步骤5、在系{o1}下求解lo1与lo3间距。
[0085]
利用公式(15)得lo1与lo3公垂线方向向量(l
31
,m
31
,n
31
)
[0086][0087]
联立(10)、(14)及(15)式,求解在lo1与lo3公垂线上投影模长,即lo1与lo3在系{o1}下间距d
[0088][0089]
式(16)即在系{o1}下lo1与lo3间距。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。