1.本发明涉及一种机械爪,更确切的说是一种绝缘杆构成的无线控制电动机械爪系统。
背景技术:
2.在由于变电站大多在室外空旷环境中,站内线路和设备以及站外围墙电子围栏经常受到悬挂柔性异物的困扰。若不及时处理,轻则影响设备运行,重则导致停电事故,影响电网安全稳定。
技术实现要素:
3.本发明的目的是提供一种绝缘杆构成的无线控制电动机械爪系统,能够通过支撑杆与辅助抓取夹具相结合,使用者到达维修位置后,可以手持支撑杆,带动固定弧形夹板与旋转弧形夹板到达夹取柔性异物的区域,然后开启电动驱动装置,电动驱动装置带动旋转弧形夹板旋转,从而带动旋转弧形夹板与固定弧形夹板配合夹住柔性异物,从而手动控制支撑杆将异物取下
4.本发明为实现上述目的,通过以下技术方案实现:
5.绝缘杆构成的无线控制电动机械爪系统,包括支撑杆,支撑杆的端部安装辅助抓取夹具,所述辅助夹取夹具包括固定弧形夹板、电动驱动装置和旋转弧形夹板,固定弧形夹板的一侧与支撑杆连接,支撑杆的一端铰接旋转弧形夹板,旋转弧形夹板的一侧连接第二链轮,第二链轮的中心轴与旋转弧形夹板的铰接轴共线,固定弧形夹板的一侧连接支架,支架的一侧通过转轴连接旋转轮,旋转轮能够在支架上转动,旋转轮的一侧连接第一链轮,第一链轮的中心轴与旋转轮的转轴共线,第一链轮与第二链轮之间安装链条,链条的两侧分别与第一链轮与第二链轮配合,旋转轮的侧周连接数个卷绕杆,电动驱动装置能够驱动旋转弧形夹板转动。
6.为了进一步实现本发明的目的,还可以采用以下技术方案:所述电动驱动装置包括电动推杆与蓄电池、电动推杆驱动器,蓄电池为电动推杆驱动器供电,电动推杆驱动器能够控制电动推杆运行,电动推杆的固定端与支撑杆铰接,电动推杆的推杆与旋转弧形夹板的中部铰接,支撑杆的一侧与蓄电池、电动推杆驱动器的外壳连接,
7.所述第二链轮的直径大于第一链轮直径的五倍。
8.所述支撑杆上安装辅助装置,所述辅助装置包括腰带,腰带的一侧连接竖直托板,竖直托板的底部连接斜托板,斜托板靠近竖直托板的一侧高于另一侧,斜托板的一侧连接万向节,万向节的一端与斜托板配合,万向节的另一端连接套管,套管与支撑杆插接配合,套管的侧部开设长条槽,支撑杆的侧部连接把手,把手穿过长条槽,套管的侧部连接自锁反弹器被锁定球形端,斜托板的侧部连接自锁反弹器锁定端,自锁反弹器锁定端能够将自锁反弹器被锁定球形端锁定,套管的侧部开设螺孔,套管通过螺孔螺纹连接螺栓,螺栓能够将支撑杆与套管锁定。
9.所述固定弧形夹板的一侧开设透槽,旋转弧形夹板的端部能够插入到透槽的内部。
10.所述支撑杆的一侧连接蓄电池、控制器、遥控器、遥控电机,套管的侧部连接遥控器,电遥控电机的外壳、蓄电池的外壳、控制器的外壳均与支撑杆连接,控制器控制遥控电机运行,遥控电机的输出轴与旋转弧形夹板连接,遥控电机能够控制旋转弧形夹板沿着铰接轴转动,遥控器可以遥控制器。
11.本发明的优点在于:本发明通过支撑杆与辅助抓取夹具相结合,使用者到达维修位置后,可以手持支撑杆,带动固定弧形夹板与旋转弧形夹板到达夹取柔性异物的区域,然后开启电动驱动装置,电动驱动装置带动旋转弧形夹板旋转,从而带动旋转弧形夹板与固定弧形夹板配合夹住柔性异物,从而手动控制支撑杆将异物取下。在旋转弧形夹板旋转过程中,会通过第二链轮、链条、第一链轮的配合驱动旋转轮与卷绕杆旋转,进入固定弧形夹板与旋转弧形夹板内侧的塑料袋、风筝面料等柔性异物有一定几率被旋转轮钩住,从而提高辅助抓取夹具与柔性异物配合的牢固程度,提高将柔性异物取下的成功率,当柔性异物被取下后,旋转弧形夹板打开时,卷绕杆能够跟随反向旋转,从而方便柔性异物与旋转轮脱离。
附图说明
12.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
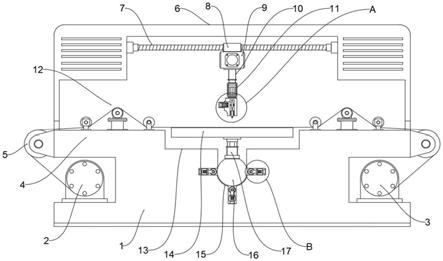
13.图1为本发明的结构示意图之一;
14.图2为本发明的结构示意图之二;
15.图3为图2的a向放大结构示意图;
16.图4为本发明的结构示意图之三;
17.图5为本发明的结构示意图之四;
18.图6为本发明的结构示意图之五。
具体实施方式
19.以下结合附图对本发明的优选实施例进行说明。
20.实施例1:
21.绝缘杆构成的无线控制电动机械爪系统,如图1-图6所示,包括支撑杆9,支撑杆9的端部安装辅助抓取夹具,所述辅助夹取夹具包括固定弧形夹板1、电动驱动装置和旋转弧形夹板10,固定弧形夹板1的一侧与支撑杆9连接,支撑杆9的一端铰接旋转弧形夹板10,旋转弧形夹板10的一侧连接第二链轮7,第二链轮7的中心轴与旋转弧形夹板10的铰接轴共线,固定弧形夹板1的一侧连接支架5,支架5的一侧通过转轴连接旋转轮3,旋转轮3能够在支架5上转动,旋转轮3的一侧连接第一链轮4,第一链轮4的中心轴与旋转轮3的转轴共线,第一链轮4与第二链轮7之间安装链条6,链条6的两侧分别与第一链轮4与第二链轮7配合,旋转轮3的侧周连接数个卷绕杆2,电动驱动装置能够驱动旋转弧形夹板10转动。
22.本发明通过支撑杆9与辅助抓取夹具相结合,使用者到达维修位置后,可以手持支撑杆9,带动固定弧形夹板1与旋转弧形夹板10到达夹取柔性异物的区域,然后开启电动驱
动装置,电动驱动装置带动旋转弧形夹板10旋转,从而带动旋转弧形夹板10与固定弧形夹板1配合夹住柔性异物,从而手动控制支撑杆9将异物取下。在旋转弧形夹板10旋转过程中,会通过第二链轮7、链条6、第一链轮4的配合驱动旋转轮3与卷绕杆2旋转,进入固定弧形夹板1与旋转弧形夹板10内侧的塑料袋、风筝面料等柔性异物有一定几率被旋转轮3钩住,从而提高辅助抓取夹具与柔性异物配合的牢固程度,提高将柔性异物取下的成功率,当柔性异物被取下后,旋转弧形夹板10打开时,卷绕杆2能够跟随反向旋转,从而方便柔性异物与旋转轮3脱离。
23.适用范围具体实施的选材和可行性分析:我们实际制作的样品以说明书附图作为图纸,按照说明书附图中各个部件的比例和配合方式实施,所述的连接为强力胶黏剂连接焊接铆接法兰连接一体成型式连接等常用的连接方式,实际制作时可以根据实际连接强度需要无需创造性的选择对应的连接方式连接点的厚度和强度。实施例用到的部件电动推杆选材:品牌名称:龙翔牌型号:行程为200毫米、推力1000n电压24v的电动推杆适配电源:24v/4a开关电源品牌:明纬型号本发明的电动推杆可以采用龙翔牌、行程为200毫米、推力1000n电压24v的电动推杆,具备对应的电动推杆电机线性驱动器和电源,本技术仅利用电动推杆一推一拉的功能,实际使用时,可以人工手工根据实际需要通过驱动装置控制电动推杆开启和关闭,实现本技术的基本功能。至于电动推杆的自动控制电路可以由电学控制领域的技术人员可以无需创造性的设计出来,这并不限制本技术的实现。固定弧形夹板1与旋转弧形夹板10均为弧形板状结构。支撑杆9为绝缘杆。电动驱动装置可以采用遥控车电机、遥控车电驱动装置、遥控器三者结合,遥控车电驱动装置的壳体、遥控车电机的壳体可以与支撑杆9连接,遥控车电机的输出轴与旋转弧形夹板10连接,遥控车电机能够控制旋转弧形夹板10沿着铰接轴转动,使用者可以通过遥控器控制遥控车电驱动装置,进而控制遥控车电机带动旋转弧形夹板10旋转从而与固定弧形夹板1配合实现夹取操作。
24.实施例2:
25.绝缘杆构成的无线控制电动机械爪系统,如图1-图5所示,包括支撑杆9,支撑杆9的端部安装辅助抓取夹具,所述辅助夹取夹具包括固定弧形夹板1、电动驱动装置和旋转弧形夹板10,固定弧形夹板1的一侧与支撑杆9连接,支撑杆9的一端铰接旋转弧形夹板10,旋转弧形夹板10的一侧连接第二链轮7,第二链轮7的中心轴与旋转弧形夹板10的铰接轴共线,固定弧形夹板1的一侧连接支架5,支架5的一侧通过转轴连接旋转轮3,旋转轮3能够在支架5上转动,旋转轮3的一侧连接第一链轮4,第一链轮4的中心轴与旋转轮3的转轴共线,第一链轮4与第二链轮7之间安装链条6,链条6的两侧分别与第一链轮4与第二链轮7配合,旋转轮3的侧周连接数个卷绕杆2,电动驱动装置能够驱动旋转弧形夹板10转动。
26.所述电动驱动装置包括电动推杆8与蓄电池23、电动推杆驱动器15,蓄电池23为电动推杆驱动器15供电,电动推杆驱动器15能够控制电动推杆8运行,电动推杆8的固定端与支撑杆9铰接,电动推杆8的推杆与旋转弧形夹板10的中部铰接,支撑杆9的一侧与蓄电池23、电动推杆驱动器15的外壳连接,
27.本发明的电动推杆8能够驱动旋转弧形夹板10旋转,从而显示旋转弧形夹板10与固定弧形夹板1配合实现夹取操作。
28.实施例3:
29.绝缘杆构成的无线控制电动机械爪系统,如图1-图5所示,包括支撑杆9,支撑杆9
的端部安装辅助抓取夹具,所述辅助夹取夹具包括固定弧形夹板1、电动驱动装置和旋转弧形夹板10,固定弧形夹板1的一侧与支撑杆9连接,支撑杆9的一端铰接旋转弧形夹板10,旋转弧形夹板10的一侧连接第二链轮7,第二链轮7的中心轴与旋转弧形夹板10的铰接轴共线,固定弧形夹板1的一侧连接支架5,支架5的一侧通过转轴连接旋转轮3,旋转轮3能够在支架5上转动,旋转轮3的一侧连接第一链轮4,第一链轮4的中心轴与旋转轮3的转轴共线,第一链轮4与第二链轮7之间安装链条6,链条6的两侧分别与第一链轮4与第二链轮7配合,旋转轮3的侧周连接数个卷绕杆2,电动驱动装置能够驱动旋转弧形夹板10转动。
30.所述第二链轮7的直径大于第一链轮4直径的五倍。
31.本发明的第二链轮7的直径大于第一链轮4直径的五倍能够提高旋转弧形夹板10旋转过程中带动旋转轮3旋转的圈数,提高卷绕杆2挂住柔性杂物的几率。
32.实施例4:
33.绝缘杆构成的无线控制电动机械爪系统,如图1-图5所示,包括支撑杆9,支撑杆9的端部安装辅助抓取夹具,所述辅助夹取夹具包括固定弧形夹板1、电动驱动装置和旋转弧形夹板10,固定弧形夹板1的一侧与支撑杆9连接,支撑杆9的一端铰接旋转弧形夹板10,旋转弧形夹板10的一侧连接第二链轮7,第二链轮7的中心轴与旋转弧形夹板10的铰接轴共线,固定弧形夹板1的一侧连接支架5,支架5的一侧通过转轴连接旋转轮3,旋转轮3能够在支架5上转动,旋转轮3的一侧连接第一链轮4,第一链轮4的中心轴与旋转轮3的转轴共线,第一链轮4与第二链轮7之间安装链条6,链条6的两侧分别与第一链轮4与第二链轮7配合,旋转轮3的侧周连接数个卷绕杆2,电动驱动装置能够驱动旋转弧形夹板10转动。所述支撑杆9上安装辅助装置,所述辅助装置包括腰带17,腰带17的一侧连接竖直托板18,竖直托板18的底部连接斜托板20,斜托板20靠近竖直托板18的一侧高于另一侧,斜托板20的一侧连接万向节19,万向节19的一端与斜托板20配合,万向节19的另一端连接套管12,套管12与支撑杆9插接配合,套管12的侧部开设长条槽13,支撑杆9的侧部连接把手14,把手14穿过长条槽13,套管12的侧部连接自锁反弹器被锁定球形端21,斜托板20的侧部连接自锁反弹器锁定端22,自锁反弹器锁定端22能够将自锁反弹器被锁定球形端21锁定,套管12的侧部开设螺孔,套管12通过螺孔螺纹连接螺栓16,螺栓16能够将支撑杆9与套管12锁定。
34.本发明的辅助装置可以利用腰带17绑定到维护人员腰上,从而让套管12的下端能够与人员配合,让人员的腰部能够为套管12形成支点,提高辅助抓取夹具清理杂物的稳定性。竖直托板18可以与人员身体的侧部贴合、斜托板20能够与人员腿部贴合,从而提高人员身体与套管12底座配合面积,让人员佩戴更加舒适,提高套管12的稳定性。万向节19可以地方便在一定范围内调节套管12的角度。当人员携带本装置行动或者攀爬时,可以将支撑杆9收入套管12的内部、并用螺栓16将支撑杆9与套管12锁定,然后旋转套管12让自锁反弹器被锁定球形端21与自锁反弹器锁定端22配合,从而避免本装置过多影响人员行动和攀爬。维护人员也可以提着本装置到达维护位置后佩戴腰带17。
35.实施例5:
36.绝缘杆构成的无线控制电动机械爪系统,如图1-图5所示,包括支撑杆9,支撑杆9的端部安装辅助抓取夹具,所述辅助夹取夹具包括固定弧形夹板1、电动驱动装置和旋转弧形夹板10,固定弧形夹板1的一侧与支撑杆9连接,支撑杆9的一端铰接旋转弧形夹板10,旋转弧形夹板10的一侧连接第二链轮7,第二链轮7的中心轴与旋转弧形夹板10的铰接轴共
线,固定弧形夹板1的一侧连接支架5,支架5的一侧通过转轴连接旋转轮3,旋转轮3能够在支架5上转动,旋转轮3的一侧连接第一链轮4,第一链轮4的中心轴与旋转轮3的转轴共线,第一链轮4与第二链轮7之间安装链条6,链条6的两侧分别与第一链轮4与第二链轮7配合,旋转轮3的侧周连接数个卷绕杆2,电动驱动装置能够驱动旋转弧形夹板10转动。所述固定弧形夹板1的一侧开设透槽11,旋转弧形夹板10的端部能够插入到透槽11的内部。
37.本发明的固定弧形夹板1的一侧开设透槽11,能够在固定弧形夹板1的侧部旋转弧形夹板10配合夹取电线上柔性杂物时,利用旋转弧形夹板10与透槽11插接配合,提高固定弧形夹板1与旋转弧形夹板10与柔性杂物配合更加牢固,方便将柔性杂物取下。
38.所述支撑杆9的一侧连接蓄电池23、控制器26、遥控器25、遥控电机24,套管12的侧部连接遥控器25,电遥控电机24的外壳、蓄电池23的外壳、控制器26的外壳均与支撑杆9连接,控制器26控制遥控电机24运行,遥控电机24的输出轴与旋转弧形夹板10连接,遥控电机24能够控制旋转弧形夹板10沿着铰接轴转动,遥控器25可以遥控制器26。
39.电动驱动装置可以采用公开公告号:cn202283184u专利公开的遥控电机、控制器、电池和遥控器,蓄电池23相当于公告号:cn202283184u专利公开的池,电池为控制器供电,控制器控制遥控电机运行,遥控电机的输出轴与旋转弧形夹板10连接,遥控电机能够控制旋转弧形夹板10沿着铰接轴转动,工人可以通过遥控器控制遥控电机的运行。
40.以上所述仅为本发明的优选实施例而已,并不用于限制本发明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。