技术特征:
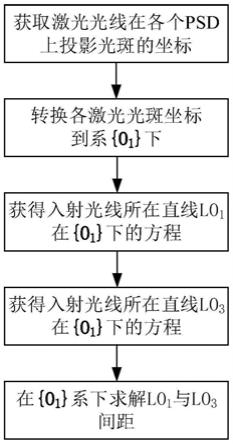
1.用于机器人自标定的激光光线间距测量方法,其特征是,该方法包括以下步骤:步骤1、获取激光光线在各个psd上投影光斑的坐标;设psd1坐标系为{o1},psd2坐标系为{o2},psd3坐标系为{o3},psd4坐标系为{o4},{o1}、{o2}、{o3}、{o4}刚性固接在一起;系{o2}相对于系{o1}的位姿转换矩阵为系{o3}相对于系{o1}的位姿转换矩阵为系{o4}相对于系{o1}的位姿转换矩阵为是已知的;使激光光线lo1经由psd1中心区域反射至psd2中心区域,此时入射到系{o1}下的光斑坐标为p1(x1,y1,0),反射到系{o2}下光斑坐标为p2(x2,y2,0);使激光光线lo3经由psd3中心区域反射至psd4中心区域,此时入射到系{o3}下光斑坐标为p3(x3,y3,0),反射到系{o4}下光斑坐标为p4(x4,y4,0);步骤2、转换各激光光斑坐标到系{o1}下;利用公式(1)求解p2在系{o1}下的坐标p
21
(x
21
,y
21
,z
21
);利用公式(2)求解p3在系{o1}下的坐标p
31
(x
31
,y
31
,z
31
);利用公式(3)求解p4在系{o1}下的坐标p
41
(x
41
,y
41
,z
41
);步骤3、获得入射光线所在直线lo1在系{o1}下的方程;设p2关于系{o1}中xoy平面的对称点坐标为p
′
21
(x
′
21
,y
′
21
,z
′
21
),p1与p
′
21
在lo1上;系{o1}中xoy平面在系{o1}下的单位法向量为则p2与p
′
21
所在直线方向向量与平行,即:向量与在投影和为0,即:(x
21
,y
21
,z
21
)
·
(l1,m1,n1) (x
′
21
,y
′
21
,z
′
21
)
·
(l1,m1,n1)=0
ꢀꢀꢀꢀ
(5)联立(4)、(5)式得式(6),即得p
′
21
(x
′
21
,y
′
21
,z
′
21
);
利用(7)式求解lo1单位方向向量单位方向向量联立(6)、(7)式,得lo1在系{o1}下方程公式(8);步骤4、获得入射光线所在直线lo3在系{o1}下的方程:设p4关于系{o3}中xoy平面的对称点在系{o1}下坐标为p
′
41
(x
′
41
,y
′
41
,z
′
41
),p3与p
′
41
在lo3上;利用式(9)求解系{o3}中xoy平面在系{o1}下的单位法向量}下的单位法向量则p
41
与p
′
41
所在直线方向向量与平行,即:平行,即:与在投影和为0,即:(x
′
41
,y
′
41
,z
′
41
)
·
(l
31
,m
31
,n
31
) (x
41
,y
41
,z
41
)
·
(l
31
,m
31
,n
31
)=0
ꢀꢀꢀꢀ
(11)联立(10)、(11)式得式(12),即得p
′
41
(x
′
41
,y
′
41
,z
′
41
);利用(13)式求解lo3单位方向向量
联立(12)、(13)式,得lo3所在直线在系{o1}下方程式(14);步骤5、在系{o1}下求解lo1与lo3间距;利用公式(15)得lo1与lo3公垂线方向向量(l
31
,m
31
,n
31
)联立(10)、(14)及(15)式,求解在lo1与lo3公垂线上投影模长,即lo1与lo3在系{o1}下间距d式(16)即在系{o1}下lo1与lo3间距。
技术总结
用于机器人自标定的激光光线间距测量方法,涉及机器人标定技术领域,具体涉及面向机器人自标定的机器人闭环运动链建立方法,为了解决现有技术中激光光斑坐标测量方法存在的效率低问题,提出了一种用于机器人自标定的激光光线间距测量方法,采用4个PSD作为激光光线约束,使激光光斑对准PSD中心区域,完成激光光线间距测量。用于机器人自标定的激光光线间距测量方法,包括以下步骤:步骤1、获取激光光线在各个PSD上投影光斑的坐标;步骤2、转换各激光光斑坐标到系{O1}下;步骤3、获得入射光线所在直线LO1在系{O1}下的方程;步骤4、获得入射光线所在直线LO3在系{O1}下的方程;步骤5、在系{O1}下求解LO1与LO3间距。间距。间距。
技术研发人员:苏成志 姜丰 包海峰 王浪
受保护的技术使用者:长春理工大学
技术研发日:2021.11.12
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。