1.本实用新型涉及轮对轴承装配技术领域,具体涉及一种上料设备及打码工装。
背景技术:
2.轮对是火车上重要的部件,轮对通常包括轮轴,轮轴的两端通常需要装配轴承,而在轮轴装配轴承的过程中,通常还需要装配一些关联的工件,如与轮轴相配合的前盖组件,所述前盖组件包括前盖(或称为端盖、压板)、标志板(或称为铭牌)、止动片以及若干螺栓,如附图所示,前盖、铭牌以及止动片分别构造有至少三个均匀分布的通孔,以便适配轮轴端部的螺纹孔。
3.现有的装配工艺中,上述工件通常是由人工在备料间提前垛装备料,然后再将这些工件批量的转移到所对应的上料工位处进行上料,最后利用上料工位处的工件进行装配即可;为便于批量转移各工件,设计了一种上料工装,所述上料工装通常包括底座和至少三根竖直设置于底座的导向柱(导向柱的数目与工件中通孔的数目适配),且各导向柱的外径小于工件(如前盖、铭牌或止动片)中通孔的内径,使得各工件可以通过通孔堆叠于上料工装,如图所示,底座的底部通常构造有若干用于定位的定位柱,如图所示;导向柱的侧面还构造有卡槽,如图所示,以适配抓钩,以便利用吊具将上料工装整体吊运到上料工位处的工装台上;在实际装配过程中,当约束有工件(如前盖、标志板或止动片)的上料工装被吊运到工装台后,通常还需要利用机械手从上料工装中逐一取出各工件,以便进行后续的操作,例如,需要从上料工装中逐一取出标志板,以便对各标志板进行打码,打码之后再进行组装;然而,现有技术中,机械手在每次取走上料工装中位于最上方的工件时,都需要重新识别和定位该工件的位置,才能准确的进行抓取,导致取工件的过程耗时长、效率低,且抓取精度不高,亟待解决。
技术实现要素:
4.本实用新型的目的在于解决现有技术中,当前盖、标志板或止动片等工件约束于上料工装后,在上料工位处,机械手在取工件的过程中,每次都需要重新识别和定位最上层工件的位置,导致取工件的抓取过程存在耗时长、效率低,且抓取精度不高等问题,提供了一种便于高效、快捷、高精度抓取工件的上料设备,主要构思为:
5.一种上料设备,包括工装台和顶升机构,所述工装台构造有用于支撑上料工装的支撑部及用于适配上料工装中各定位柱的定位部,
6.所述顶升机构包括顶升动力和顶升件,所述顶升动力与顶升件传动连接,
7.所述支撑部构造有用于穿过所述顶升件的顶升孔,顶升件用于在顶升动力的驱动下顶升上料工装中的工件,并使上料工装中最上层的工件移动到所设定的高度处。使得机械手每次都可以在相同的位置处抓取最上层的工件,无需重新识别和定位最上层工件的位置,有利于高效、快捷、高精度的抓取工件,尤其适用于抓取前盖、标志板或止动片等。
8.优选的,各定位部处分别构造有至少一个所述顶升孔。
9.优选的,所述顶升件为柱状结构,且顶升件的数目与所述顶升孔的数目相适配。使得每个顶升孔中都有一个顶升件可以顶升上方的工件。
10.优选的,所述支撑部的上表面为平面,和/或,所述支撑部为工装台的顶板。
11.优选的,所述工装台还包括若干侧板和底板,所述顶板、侧板以及底板共同围成箱状结构,所述顶升机构安装于所述工装台的内部。
12.优选的,所述工装台的底部还安装有若干轮子。以便转移工装台。
13.为适配上料工装中的各定位柱,优选的,所述定位部为构造于工装台的若干定位孔或定位槽。
14.优选的,所述定位部包括至少三个定位孔,且至少三个所述定位孔分别沿圆周方向均匀分布。以便适配构造有至少三个定位柱的上料工装。
15.为解决防止在顶升过程中出现偏载的问题,优选的,定位部处构造有一个所述顶升孔,所述顶升孔位于所述定位部的中心位置处,或,定位部处构造有至少两个所述顶升孔,各所述顶升孔分别沿圆周方向均匀分布。
16.为解决沿竖直方向升降的问题,方案一中,所述顶升动力为气缸、电动缸或液压缸,所述顶升件竖直连接于所述顶升动力。
17.方案二中,还包括传动部件,所述顶升件设置于所述传动部件,所述传动部件连接于顶升动力,顶升动力用于驱动传动部件竖直升/降。
18.优选的,所述顶升动力为沿竖直方向布置的直线滑台、直线导轨、直线运动模组或滚珠丝杆直线传动机构。
19.为解决精确控制顶升机构的问题,进一步的,还包括控制器,所述控制器与所述顶升动力相连。以便利用控制器控制顶升动力启/停。
20.优选的,所述控制器为单片机、pc机、plc、微处理器等。
21.为解决运行过程中复检的问题,进一步的,还包括相机,所述相机与所述控制器相连,用于采集所述高度处的图像。一方面,可以通过图像识别技术精确判断最上层工件是否被推送到所设定的高度处,以便实现推送过程的闭环控制,实现推送复检,另一方面,可以通过图像识别技术精确判断最上层工件是/否被机械手抓走,以便实现抓取过程的闭环控制,实现抓取复检,从而有利于精确控制该工序的进行。
22.优选的,所述相机为视觉相机。
23.进一步的,还包括支架,所述支架固定安装于所述工装台,所述相机安装于所述支架。
24.一种打码工装,包括上料设备,还包括激光打码器,所述支撑部构造有用于定位标志板的定位结构,所述激光打码器安装于所述定位结构的正上方,用于在标志板上打码。在本方案中,通过构造定位结构,以解决标志板的约束和定位问题,通过在定位结构的上方安装激光打码器,可以利用激光打码器在标志板上打码,不仅效率高,而且所打的码整齐、美观,可以解决在标志板上打码的问题。
25.优选的,所述激光打码器采用的是激光打标机或激光雕刻机。
26.进一步的,还包括机架,所述机架安装于所述工装台,所述激光打码器安装于所述机架。
27.为解决标志板的定位问题,优选的,所述定位结构包括至少三个定位凸起,所述定
位凸起沿圆周方向均匀分布,各定位凸起分别用于对应标志板中的各通孔。使得标志板可以通过通孔与定位凸起的配合套设于工装台的表面,一方面,定位凸起对标志板的起到约束的作用,防止标志板移动,另一方面,定位凸起可以定位标志板的方位,使得标志板可以在预定的方位被打码。
28.为适配标志板中的通孔,优选的,所述定位凸起为圆柱形结构,且各定位凸起的外径小于标志板中通孔的直径。
29.进一步的,所述定位结构还包括用于支撑标志板的座体,座体的上表面为平面,且所述定位凸起分别构造于座体的上表面,所述座体固定于所述支撑部。
30.与现有技术相比,使用本实用新型提供的一种上料设备及打码工装,结构紧凑、设计合理,使得机械手每次都可以在相同的位置处抓取最上层的工件,无需重新识别和定位最上层工件的位置,有利于高效、快捷、高精度的抓取工件,尤其适用于抓取前盖、标志板或止动片等,从而可以有效解决解决现有技术存在的问题。
附图说明
31.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
32.图1为一种前盖的结构示意图。
33.图2为一种标志板的结构示意图。
34.图3为一种止动片的结构示意图。
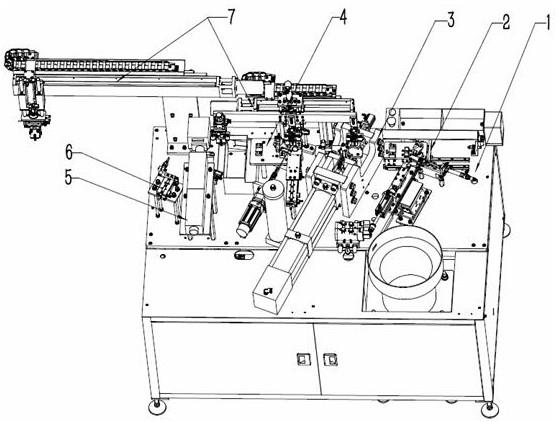
35.图4为本实用新型实施例1中提供的一种上料设备的结构示意图。
36.图5为图4的局部剖视图。
37.图6为图5的主视图。
38.图7为一种上料工装的结构示意图。
39.图8为一种顶升板的结构示意图。
40.图9为一种顶升板与上料工装配合在一起后的结构示意图。
41.图10为在图9所提供的上料工装中堆叠标志板后的结构示意图。
42.图11为将图10中的上料工装放置于图4所提供的上料设备后的局部结构示意图。
43.图12为本实用新型实施例1中提供的另一种上料设备的局部俯视图。
44.图13为本实用新型实施例2中提供的一种打码工装的结构示意图。
45.图14为图13的局部示意图。
46.图中标记说明
47.前盖101、标志板102、止动片103、通孔104
48.工装台200、支撑部201、顶升孔202、定位部203、定位孔204、轮子205
49.顶升机构300、顶升动力301、传动部件302、顶升件303
50.相机400、支架401
51.上料工装500、底座501、连通孔502、定位柱503、导向柱504、卡槽505
52.顶升板600、导向孔601
53.定位结构700、座体701、定位凸起702
54.激光打码器800、机架801。
具体实施方式
55.下面将结合本实用新型实施例中附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
56.实施例1
57.本实施例中提供了一种上料设备,包括工装台200和顶升机构300,所述工装台200构造有用于支撑上料工装500的支撑部201及用于适配上料工装500中各定位柱503的定位部203,其中,
58.所述工装台200可以是现有的工装台200,例如,所述工装台200可以是柜子、桌子、架子等,工装台200的上表面可以优先构造为平面,工装台200的底部构造有若干轮子205,如图4所示,以便移动整个工装台200;
59.支撑部201的上表面优先采用平面,以便平稳的支撑上料工装500及工件;支撑部201可以为工装台200的顶板,作为一种优选的实施方式,工装台200还包括若干侧板和底板,如图4所示,所述顶板、侧板以及底板可以共同围成箱状结构的工装台200,而所述顶升机构300可以优先安装于工装台200的内部。
60.在本实施例中,顶升机构300包括顶升动力301和顶升件303,所述顶升动力301与顶升件303传动连接,以便利用顶升动力301驱动顶升件303竖直升/降;而为使得顶升件303的上端可以穿出支撑部201(如工装台200的顶板),在更完善的方案中,所述支撑部201还构造有用于穿过顶升件303的顶升孔202,如图4-图6所示,顶升件303用于在顶升动力301的驱动下顶升上料工装500中的工件,并使上料工装500中最上层的工件移动到所设定的高度处(即所设定的抓取工位处),使得机械手(本实施例所述的机械手通常是指前端带有吸盘的机械手,以便利用吸盘吸起工件)每次都可以在相同的位置处抓取最上层的工件,无需重新识别和定位最上层工件的位置,有利于高效、快捷、高精度的抓取工件,尤其适用于抓取前盖101、标志板102或止动片103等。
61.在本上料设备中,定位部203的数目可以是一个、两个或多个,当设置有多个定位部203时,各定位部203既可以用于约束和定位一种工件的上料工装500,也可以分别用于约束和定位不同工件的上料工装500,例如,如图4及图5所示,工装台200构造有两个定位部203,一个定位部203可以约束和定位用于放置止动片103的上料工装500,另一个定位部203可以约束和定位用于放置标志板102的上料工装500。
62.在各定位部203处,分别构造有至少一个顶升孔202,以便与顶升机构300相配配合,且各定位部203既可以分别单独设置一个顶升机构300,也可以各定位部203共同使用一个顶升机构300。
63.顶升件303具有多种实施方式,作为优选,顶升件303可以优先采用柱状结构,如图5及图6所示,顶升件303采用的是圆柱状结构,以便与顶升孔202相配合,且顶升件303的数目与所述顶升孔202的数目相适配,使得每个顶升孔202中都有一个顶升件303可以顶升上方的工件。
64.为适配上料工装500中的各定位柱503,在优选的实施方式中,所述定位部203可以为构造于工装台200的若干定位孔204或定位槽,作为举例,在本实施例中,所述定位部203为构造于所述支撑部201的若干定位孔204,且各定位孔204尺寸与上料工装500中各定位柱503的尺寸相适配,使得上料工装500中各定位柱503可以分别插入所对应的定位孔204中。
65.各定位部203中定位孔204或定位槽的数目与上料工装500中定位柱503的数目相适配,在优选的实施方式中,所述定位部203包括至少三个定位孔204,且至少三个所述定位孔204分别沿圆周方向均匀分布;以便适配构造有至少三个定位柱503的上料工装500;相应地,在定位部203处,可以仅构造有一个顶升孔202,此时,所述顶升孔202应该位于所述定位部203的中心位置处,如图4及图5所示,即,顶升孔202的中心轴线与各定位孔204所在圆的中心轴线重合,防止顶升过程中出现偏载的问题;另外,在定位部203处,也可以构造至少两个顶升孔202,如图12所示,此时,各顶升孔202可以分别沿圆周方向均匀分布,使得顶升过程中,工件的受力更平衡,也能防止顶升过程出现偏载、卡死等问题。
66.顶升动力301具有多种实施方式,在一种实施方式中,所述顶升动力301可以为气缸、电动缸或液压缸等,此时,所述顶升件303竖直连接于所述顶升动力301,以便利用顶升动力301竖直方向的伸/缩驱动顶升件303沿竖直方向升/降。
67.在另一种实施方式中,还包括传动部件302,所述顶升件303设置于所述传动部件302,所述传动部件302连接于顶升动力301,顶升动力301可以驱动传动部件302竖直升/降,从而带动顶升件303沿竖直方向升/降;此时,所述顶升动力301可以为沿竖直方向布置的直线滑台、直线导轨、直线运动模组或滚珠丝杆直线传动机构等,作为举例,如图5及图6所示,在本实施例中,顶升动力301采用的是直线滑台,直线滑台固定安装于工装台200的内部,且顶升件303固定连接于传动部件302,传动部件302固定连接于直线滑台的滑台。
68.为精确控制顶升机构300,在更完善的方案中,本上料设备还包括控制器,所述控制器与所述顶升动力301相连,以便利用控制器精确控制顶升动力301启/停,从而精确控制最上层工件的高度;控制器具有多种实施方式,作为举例,所述控制器可以采用单片机、pc机、plc、微处理器(如arm芯片)等。
69.而为使得自动运行过程更可靠,在更完善的方案中,本上料设备还包括相机400,如图4所示,所述相机400与所述控制器相连,相机400用于采集所述所设定高度处的图像,即相机400用于采集抓取工位处的图像;一方面,可以通过图像识别技术精确判断最上层工件是否被推送到所设定的高度处,以便实现推送过程的闭环控制,实现推送复检,另一方面,可以通过图像识别技术精确判断最上层工件是/否被机械手抓走,以便实现抓取过程的闭环控制,实现抓取复检,从而有利于精确控制该工序的进行。
70.在具体实施时,所述相机400可以优先采用视觉相机400,相应的,为便于将相机400安装于所设定的高度处,还包括支架401,如图4所示,所述支架401固定安装于所述工装台200,所述相机400安装于所述支架401,使得相机400可以正对所述抓取工位,更有利于采集图像。
71.为便于说明,作为一种举例,如图7-图10所示,上料工装500包括底座501和三根竖直设置于底座501的导向柱504,且各导向柱504的外径小于工件(如前盖101、铭牌或止动片103)中通孔104的内径,使得各工件可以通过通孔104堆叠于上料工装500,如图10所示,底座501的底部构造有三个用于定位的定位柱503,如图7所示,且各定位柱503分别沿圆周方向均匀分布,同时,底座501还构造有适配所述顶升孔202的连通孔502,以便穿过顶升件303,如图7所示;导向柱504顶部的侧面还构造有卡槽505,如图7-图10所示,以适配抓钩,为使得顶升过程中受力更均匀,在实际使用时,上料工装500还包括一顶升板600,所述顶升板600构造有三个导向孔601,三个所述导向孔601分别适配三根所述导向柱504,使得顶升板600可以通过导向孔601套设于导向柱504,并使得各工件可以堆叠于顶升板600的上方,如图10所示。
72.相应地,作为举例,如图4所示,本上料设备中的定位部203包括三个定位孔204,且三个所述定位孔204分别沿圆周方向均匀分布,以便适配该上料工装500。
73.在实际使用时,利用吊具上的抓钩卡住各卡槽505,从而可以将该上料工装500吊运到本上料设备的工装台200上,并使得各定位柱503分别插入定位部203的定位孔204内,达到约束和定位上料工装500(包括工件)的目的,如图11所示;
74.当机械手取走最上层的工件后,顶升动力301在控制器的控制下开启并驱动顶升件303顶升顶升板600,顶升板600带动所有的工件竖直上升,在这个过程中,导向柱504起到导向的作用,当最上层工件移动到所设定的高度时,控制器控制顶升动力301停机,使得最上层工件正好停留在所设定的高度,使得机械手每次都可以在相同的位置处抓取最上层的工件,无需重新识别和定位最上层工件的位置,非常的高效和快捷。
75.实施例2
76.根据实施例1所提供的上料设备,本实施例提供一种打码工装,包括实施例1中所述的上料设备,上料设备中至少有一个定位部203用于配合约束有标志板102的上料工装500;
77.如图13及图14所示,还包括激光打码器800,所述支撑部201构造有用于定位标志板102的定位结构700,且所述激光打码器800安装于所述定位结构700的正上方,激光打码器800用于在标志板102上打码;在本实施例中,通过构造定位结构700,以解决标志板102的约束和定位问题,通过在定位结构700的上方安装激光打码器800,可以利用激光打码器800在标志板102上打码,不仅效率高,而且所打的码整齐、美观,可以解决在标志板102上打码的问题。
78.在本实施例中,所述定位结构700的结构与标志板102相适配,由于标志板102通常构造有至少三个通孔104,且至少三个通孔104分别沿圆周方向均布分别,如图13及图14所示,例如,标志板102包括三个通孔104,且三个通孔104中,任意两个通孔104之间的间距相等;相应的,在本实施例中,所述定位结构700包括至少三个定位凸起702,所述定位凸起702分别沿圆周方向均匀分布,各定位凸起702分别用于对应标志板102中的各通孔104,使得标志板102可以通过通孔104与定位凸起702的配合套设于工装台200的表面,一方面,定位凸起702对标志板102的起到约束的作用,防止标志板102移动,另一方面,定位凸起702可以定位标志板102的方位,使得标志板102可以在预定的方位被打码。
79.如图13及图14所示,在本实施例中,激光打码器800安装于定位结构700的正上方,
并与所述控制器相连,控制器用于控制激光打码器800在标志板102上打码;作为举例,还包括机架801,所述机架801安装于工装台200的支撑部201,且激光打码器800安装于机架801,使得激光打码器800的激光头可以正好位于定位结构700的正上方,并对应定位结构700,如图所示,以便在标志板102的中间位置处打码,在具体实施时,所述激光打码器800可以优先采用现有的激光打标机或激光雕刻机。
80.为适配标志板102中的通孔104,在具体实施时,所述定位凸起702可以优先采用圆柱形结构,如图13及图14所示,且各定位凸起702的外径小于标志板102中通孔104的直径。
81.在更进一步的方案中,所述定位结构700还包括用于支撑标志板102的座体701,座体701的上表面为平面,以便水平支撑标志板102,各定位凸起702分别构造于座体701的上表面,如图所示,座体701固定安装于所述工装台200的支撑部201,以便利用座体701支撑标志板102;在具体实施时,座体701的形状可以根据实际需求而定,作为举例,如图13及图14所示,所述座体701可以优先采用圆形结构,座体701的材质可以与工装台200相同,也可以与工装台200不同。
82.在实际使用过程中,首先利用吊具上的抓钩将约束有多个标志板102的上料工装500吊运到工装台200上,并使得上料工装500中的各定位柱503分别插入定位部203的各定位孔204内,达到约束和定位上料工装500(包括标志板102)的目的,如图13所示;
83.然后利用机械手取走最上层的标志板102,并将该标志板102转移到定位结构700处,如图13所示,而后,一方面,在定位部203处,顶升动力301可以在控制器的控制下开启并驱动顶升件303顶升顶升板600,顶升板600带动所有的标志板102竖直上升,当最上层的标志板102移动到所设定的高度时,控制器控制顶升动力301停机,以便机械手下次抓取最上层的标志板102;
84.另一方面,在定位结构700处,控制器可以控制激光打码器800在标志板102上打码;
85.最后,当打码完成后,机械手取走定位结构700处的标志板102,以便进行后续的组装工序。
86.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。