1.本实用新型涉及仓储设备技术领域,尤其涉及一种双模式智能搬运车。
背景技术:
2.货物搬运是各个行业不可或缺的过程,随着经济的快速发展,人工搬运已不能完全满足市场的需求。智能搬运机器人从无到有,数量不断增多,其可应用与码垛搬运、集装箱等货物的自动搬运,大大减轻了人类繁重的体力劳动,具有广阔的市场前景。
3.rgv(有轨制导车辆)和agv(自动导引运输车)是目前应用较多的移动搬运机器人,在自动化物流系中均发挥着巨大的作用。rgv常用于各类高密度储存方式的立体仓库,主要用于在立体货架的各个巷道之间移动货物;而agv装备有电磁、光学或其它自动导引装置,能够沿规定的导引路径行驶,其一般用于对地面上的货物进行移动。现有的智能仓库为了将存放在地面上的货物存储至货架上,一般是在仓库内同时设置用于在轨道上行驶的agv搬运车及在地面上行驶的rgv搬运车,这无疑使得仓库内需布置较多数量的搬运设备;因而为了减少仓库内的搬运设备的数量,可寻求一种将地面上的货物直接搬运至货架上的搬运车,但该搬运车当从地面行驶至立体货架上时,会由于地面的平整度以及搬运车的行驶精度偏差等因素,导致搬运车在货架上行驶方向出现偏移,严重时甚至会出现搬运车卡死不动的现象。因此,当搬运车从地面行驶转变为轨道行驶的模式时,如何降低搬运车在轨道上行驶的角度偏差是亟待解决的技术问题。
技术实现要素:
4.有鉴于此,本实用新型提供了一种双模式智能搬运车,以解决现有技术中存在的一个或多个技术问题。
5.根据本实用新型的一方面,提供了一种双模式智能搬运车,所述搬运车包括车架、驱动系统以及行驶轮组,所述行驶轮组包括:
6.轨道行驶轮,所述轨道行驶轮的支撑轴固定在所述车架上,所述轨道行驶轮至少为四组,四组所述轨道行驶轮对称设置在所述车架的左侧和右侧;
7.轨道导向轮,固定在所述车架上,所述轨道导向轮的支撑轴竖直设置,且所述轨道导向轮位于所述轨道行驶轮的内侧;
8.地面行驶轮,固定在所述车架上,且位于所述车架的底部。
9.在本实用新型的一些实施例中,所述车架为方形车架,所述方形车架的左侧具有左侧板,所述方形车架的右侧具有右侧板,所述轨道行驶轮位于所述左侧板或右侧板的外侧。
10.在本实用新型的一些实施例中,所述轨道导向轮的数量为四个,其中两个靠近于所述左侧板设置,另外两个靠近于所述右侧板设置,四个所述轨道导向轮均位于所述左侧板和右侧板的内侧。
11.在本实用新型的一些实施例中,所述行驶轮组还包括辅助支撑轮,所述辅助支撑
轮固定在所述车架上,且位于所述车架的底部。
12.在本实用新型的一些实施例中,所述地面行驶轮包括第一主动轮和第二主动轮,所述第一主动轮和第二主动轮相对于所述车架的对称中心面呈左右对称设置。
13.在本实用新型的一些实施例中,所述驱动系统包括第一驱动部件和第二驱动部件,所述第一驱动部件驱动所述第一主动轮,所述第二驱动部件驱动所述第二主动轮。
14.在本实用新型的一些实施例中,所述第一主动轮和第二主动轮的两侧均分别设有减震机构。
15.在本实用新型的一些实施例中,位于车架左侧的轨道行驶轮通过第一驱动部件驱动,且位于左侧的轨道行驶轮与第一驱动部件之间设有链传动机构;位于车架右侧的轨道行驶轮通过第二驱动部件驱动,且位于右侧的轨道行驶轮与第二驱动部件之间设有链传动机构。
16.在本实用新型一些实施例中,所述第一驱动部件和第二驱动部件均为电机。
17.通过利用本实用新型上述实施例的双模式智能搬运车,可以获得的有益效果至少在于:
18.该双模式智能搬运车不仅具有轨道行驶轮还具有地面行驶轮,从而使得该搬运车不仅可在地面上行驶,还可在货架的轨道上行驶,因而采用该搬运车的仓库有效减少了搬运车的数量。另外,该搬运车还具有轨道导向轮,该轨道导向轮位于轨道行驶轮的内侧,因而当该搬运车从地面上行驶至立体货架上后,轨道导向轮实现轨道导向作用,确保了搬运车在轨道上的稳定运行。
19.本实用新型的附加优点、目的,以及特征将在下面的描述中将部分地加以阐述,且将对于本领域普通技术人员在研究下文后部分地变得明显,或者可以根据本实用新型的实践而获知。本实用新型的目的和其它优点可以通过在书面说明及其权利要求书以及附图中具体指出的结构实现到并获得。
20.本领域技术人员将会理解的是,能够用本实用新型实现的目的和优点不限于以上具体所述,并且根据以下详细说明将更清楚地理解本实用新型能够实现的上述和其他目的。
附图说明
21.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,并不构成对本实用新型的限定。附图中的部件不是成比例绘制的,而只是为了示出本实用新型的原理。为了便于示出和描述本实用新型的一些部分,附图中对应部分可能被放大,即,相对于依据本实用新型实际制造的示例性装置中的其它部件可能变得更大。在附图中:
22.图1为本实用新型一实施例的双模式智能搬运车的主视图。
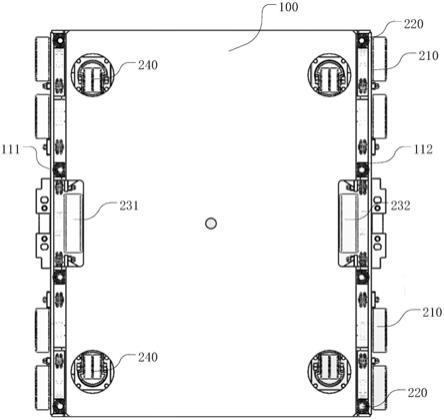
23.图2为本实用新型一实施例的双模式智能搬运车的仰视图。
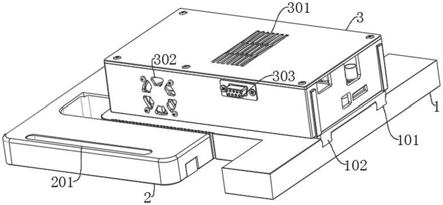
24.图3为本实用新型一实施例的双模式智能搬运车的侧视图。
25.图4为本实用新型一实施例的双模式智能搬运车在立体货架的轨道上行驶时的状态示意图。
具体实施方式
26.为使本实用新型实施例的目的、技术方案和优点更加清楚明白,下面结合附图对本实用新型实施例做进一步详细说明。在此,本实用新型的示意性实施例及其说明用于解释本实用新型,但并不作为对本实用新型的限定。
27.在此,需要说明的是,为了避免因不必要的细节而模糊了本实用新型,在附图中仅仅示出了与根据本实用新型的方案密切相关的结构和/或处理步骤,而省略了与本实用新型关系不大的其他细节。
28.应该强调,术语“包括/包含/具有”在本文使用时指特征、要素、步骤或组件的存在,但并不排除一个或更多个其它特征、要素、步骤或组件的存在或附加。
29.在此,还需要说明的是,本说明书内容中所出现的“上部”、“下部”等方位名词是相对于附图所示的位置方向;如果没有特殊说明,术语“连接”在本文不仅可以指直接连接,也可以表示存在中间物的间接连接。直接连接为两个零部件之间不借助中间部件进行连接,间接连接为两个零部件之间借助其他零部件进行连接。
30.在下文中,将参考附图描述本发明的实施例。在附图中,相同的附图标记代表相同或类似的部件。
31.图1和图2为本实用新型一实施例的双模式智能搬运车的主视图和仰视图。如图1和图2所示,该双模式智能搬运车包括车架、驱动系统以及行驶轮组。车架100整体具体的可为方形车架100,而驱动系统以及行驶轮组均被固定在车架100上。
32.行驶轮组进一步的包括轨道行驶轮210、轨道导向轮220以及地面行驶轮。轨道行驶轮210用于确保搬运车沿立体货架的轨道行驶,而地面行驶轮用于确保搬运车在地面上行驶。轨道行驶轮210的支撑轴固定在方形车架100上,轨道行驶轮210至少具有四组,且四组轨道行驶轮210对称设置在方形车架100的左侧和右侧。其中,方形车架100的左侧和右侧具体的为图2中所述的搬运车的车架100的左右两侧。轨道导向轮220也固定在方形车架100上,且轨道导向轮220的支撑轴竖直设置,另轨道导向轮220还位于轨道行驶轮210的内侧。地面行驶轮类似的也固定在方形车架100上,且其具体的位于方形车架100的底部。
33.进一步的,方形车架100的左侧具有左侧板111,而右侧具有右侧板112,轨道行驶轮210位于左侧板111或右侧板112的外侧。具体的,四组轨道行驶轮210中的其中两组位于左侧板111的左侧,而另外两组则位于右侧板112的右侧,且位于左侧板111左侧的两组轨道行驶轮210与位于右侧板112右侧的两组轨道行驶轮210相对于左侧板111和右侧板112的对称面呈左右对称结构。应当理解的是,轨道行驶轮210的数量设为四组仅是多种示例中的一种,除此之外,轨道行驶轮210的数量具体的也可为六组、八组或更多组。
34.进一步的,轨道导向轮220的数量也可设为四个,其中两个靠近于左侧板111设置,而另外两个靠近于右侧板112设置,四个轨道导向轮220均位于所述左侧板111和右侧板112的内侧。从图2中可以看出,四个轨道导向轮220相对于方形车架100的中面也呈前后左右对称结构。图4为本实用新型一实施例的双模式智能搬运车在立体货架的轨道上行驶时的状态示意图,从图4中可以看出,当搬运车在轨道上行驶时,位于右侧板112右侧的两组轨道行驶轮210沿第二轨道的顶面421行驶,而位于右侧面左侧的两个轨道导向轮220抵靠于与第二轨道的侧面422;类似的,位于左侧板111左侧的两组轨道行驶轮210则沿第一轨道的顶面411行驶,而位于左侧面右侧的两个轨道导向轮220抵靠于第一轨道的侧面412。通过上述内
容可知,当搬运车在立体货架的轨道上行驶时,轨道导向轮220起到导向作用,从而确保搬运车沿立体货架的轨道稳定运行。
35.在另一实施例中,轨道导向轮220的总体数量还可为六个或八个。当为六个时,具体的各侧可分别设置三个轨道导向轮220;而当轨道导向轮220的总体数量为八个时,各侧可分别设置四个轨道行驶轮210。应当理解的是,轨道导向轮220的具体数量可根据搬运车车架100的具体尺寸进行设置,只要确保当搬运车沿立体货架的轨道行驶时,轨道导向轮220起到导向作用即可。
36.在本实用新型另一实施例中,行驶轮组还包括辅助支撑轮240,辅助支撑轮240固定在方形车架100上,且位于方形车架100的底部。如图2和图3所示,辅助支撑轮240具体的可为万向轮,而万向轮的数量可为四个,四个万向轮呈前后左右对称的设置在车架100的底部。在该实施例中,万向轮作为辅助支撑轮240,以确保搬运车在地面上平稳行驶或转弯。应当理解的是,当搬运车在地面上行驶时,从动轮主要用于辅助支撑,因而其也可采用除万向轮之外的其他支撑轮。
37.进一步的,地面行驶轮包括第一主动轮231和第二主动轮232,第一主动轮231和第二主动轮232相对于方形车架100的中心对称面呈左右对称设置。示例性的,车架100的左侧可具有两个平行的左侧板111,且两个左侧板111之间间隔有预定距离,而第一主动轮231位于两个左侧板111之间;类似的,车架100的右侧具有两个平行的右侧板112,两个右侧板112之间也间隔有预定距离,而第二主动轮232位于两个右侧板112之间。
38.在该实施例中,第一主动轮231和第二主动轮232可通过同一个驱动部件驱动,也可通过不同的驱动部件进行驱动。例如,第一主动轮231通过第一驱动部件进行驱动,而第二主动轮232通过第二驱动部部件驱动,并且第一驱动部件与第二驱动部件为不同的驱动部件;其中,驱动部件具体的可为电机。在该实施例中,第一主动轮231和第二主动轮232分别通过不同的驱动部件进行驱动,该搬运车可通过调整各个驱动部件的输出轴的转速及转向以调整搬运车在地面上的行驶方向。例如,当第一驱动部件和第二驱动部件分别驱动第一主动轮231和第二主动轮232朝向同一个方向且同速旋转时,此时搬运车前进或后退;而当第一主动轮231与第二主动轮232转向相同,且转速不同时,搬运车即可进行转向。
39.当搬运车在地面上行走时,由于地面的不平整会导致顶升有货物的搬运车产生颠簸,从而会影响货物的稳定性。为了解决上述问题,在本实用新型另一实施例中,第一主动轮231和第二主动轮232的两侧可均分别设有减震机构,减震机构用于吸收主动车轮的颠簸力,从而确保托板上的货物的稳定性。
40.示例性的,减震机构包括轮轴支撑座310、导向轴321和弹簧,轮轴支撑座310上可具有轴孔,且轴孔套置在主动轮的固定轴外部,轮轴支撑座310上具有沿竖直方向贯通的第一导向孔,导向轴321的一端固定在车架100上,导向轴321的另一端穿过第一导向孔,弹簧的顶端与车架100抵接,弹簧的底端与轮轴支撑座310抵接。
41.进一步的,轨道行驶轮210和地面行驶轮可以通过同一驱动部件驱动。例如,位于方形车架100左侧的轨道行驶轮210通过第一驱动部件驱动,位于方形车架100右侧的轨道行驶轮210通过第二驱动部件驱动。其中,第一主动轮231与第一驱动部件之间、位于车架100左侧的两组轨道行驶轮210与第一驱动部件之间可均设置链传动机构,可以理解,通过上述设置使得搬运车在地面上行驶时,轨道行驶轮210处于空转状态;而搬运车在轨道上行
驶时,地面行驶轮处于空转状态。类似的,位于右侧的轨道行驶轮210与第二驱动部件之间也通过链传动机构传动。
42.通过上述实施例可以发现,该双模式智能搬运车不仅具有轨道行驶轮还具有地面行驶轮,从而使得该搬运车不仅可在地面上行驶,还可在货架的轨道上行驶,因而采用该搬运车的仓库有效减少了搬运车的数量。另外,该搬运车还具有轨道导向轮,该轨道导向轮位于轨道行驶轮的内侧,因而当该搬运车从地面上行驶至立体货架上后,轨道导向轮实现轨道导向作用,确保了搬运车在轨道上的稳定运行。
43.本实用新型中,针对一个实施方式描述和/或例示的特征,可以在一个或更多个其它实施方式中以相同方式或以类似方式使用,和/或与其他实施方式的特征相结合或代替其他实施方式的特征。
44.上述所列实施例,显示和描述了本实用新型的基本原理与主要特征,但本实用新型不受上述实施例的限制,本领域技术人员在没有做出创造性劳动的前提下对本实用新型做出的修改、等同变化及修饰,均应落在本实用新型技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。