1.本发明涉及一种人工肌肉纤维,特别涉及一种人工肌肉纤维及其制法、应用和驱动测试装置,属于材料科学技术领域。
背景技术:
2.人工肌肉纤维是最近新发展的一类新型智能驱动材料,当受到外界刺激时,它会产生可逆的伸缩、转动、弯曲等形式的运动,在日常生活、医疗、军事等方面都有重要的应用前景。人工肌肉以驱动方式的不同可分为电热驱动、溶剂/气体的吸附与脱附驱动以及电化学驱动等。其中电热驱动因其形式简便、容易实现,受环境影响小等优势,在应用方面具有更大的优势。对于工作温度范围在室温之上的电热驱动人工肌肉的报道屡见不鲜,目前也广泛地应用在软体机器人、假肢、外骨骼等领域。但在低温环境下工作的仿生肌肉纤维却未见报道,随着对可穿戴设备的研究开发,以及生物医学领域的快速发展,对于低温驱动器的需求也逐日提升。而经典的热响应型人工肌肉纤维往往因为材料耐寒性能差,在零度温度以下出现断裂、性能下降或失效等问题而不能满足某些特定应用场景的需求,因此,在低温环境下工作的电热人工肌肉纤维亟待研究开发。
3.目前,电热驱动的人工肌肉纤维的驱动测试方法主要是将测试样品以及测试装置都置于室温环境下,通过对碳纳米管通电加热从而使人工肌肉纤维升温进而发生体积膨胀。但这样的热刺激形式导致纤维的温度只能从室温开始升高,也就是说我们研究的驱动现象始终都发生在室温之上。严格来讲热驱动为温差驱动,电热驱动即属于温差驱动这一类,即材料的温度发生变化,引起的温差就会导致材料产生热胀冷缩的现象,温差驱动利用了“热胀”,即温度升高体积膨胀,但这样的现象发生在低温环境下也同样会导致材料因温差而产生体积膨胀。
4.为了研究人工肌肉纤维在低温环境下的电热驱动,需要设计制备可以为纤维提供低温工作环境的驱动测试装置。目前可实现在低温环境下对人工肌肉纤维进行驱动测试的方法为热机械分析法(thermomachanical analysis,简称tma);热机械分析法为使样品处于一定的温度程序(升/降/恒温及其组合)控制下,对样品施加一定的机械力,测量样品在一定方向上的尺寸或形变量随温度或时间的变化过程,利用热机械分析仪的拉伸模式,可以测量材料的线膨胀与收缩,即可用于人工肌肉纤维的驱动测试;tma方法通过设置对人工肌肉纤维施加一恒定的静态力,通过改变纤维所处的环境温度,即设置温度程序(升/降/恒温及其组合),来测试材料由于温度改变而产生的收缩或膨胀。
5.本案发明人研究发现,现有的电热驱动人工肌肉纤维均是在室温环境下工作的,工作温度均高于室温,甚至高达几百度,并未有低温环境下工作的人工肌肉纤维报道。在特殊应用场景下,由于温度较低,人工肌肉纤维会发生断裂、变硬/变脆、性能下降等现象,无法满足使用需求。并且,传统的电热驱动装置是在室温环境下进行测试的,缺点是无法改变纤维的环境温度,不能实现其在低温环境下的驱动测试。tma测试方法虽然可以提供低温环境,但缺点是无法实现在低温环境下瞬时升高纤维的温度,即所测试的样品的温度改变只
能通过炉体温度的改变来实现,而tma的温度程序无法达到瞬时的升降温;此外,tma测试方法也无法实现对驱动行为进行连续的测试,测试过程繁琐,耗时长。
技术实现要素:
6.本发明的主要目的在于提供一种可在低温环境进行电热响应的人工肌肉纤维及其制法、应用和驱动测试装置,以克服现有技术中的不足。
7.为实现前述发明目的,本发明采用的技术方案包括:
8.本发明实施例一方面提供了一种可在低温环境进行电热响应的人工肌肉纤维,包括碳纳米管纤维和聚己内酯纳米纤维,所述聚己内酯纳米纤维均匀包裹碳纳米管纤维并形成核鞘结构,所述人工肌肉纤维整体呈现螺旋结构。
9.本发明实施例一方面还提供了一种可在低温环境进行电热响应的人工肌肉纤维的制备方法,包括:
10.在碳纳米管纤维表面均匀包裹聚己内酯纳米纤维,从而形成复合纤维;
11.对所述复合纤维进行加捻,以使得所述复合纤维整体呈现螺旋结构,从而获得所述人工肌肉纤维。
12.本发明实施例一方面还提供了一种电热驱动仿生驱动器,包括所述的可在低温环境进行电热响应的人工肌肉纤维。
13.本发明实施例一方面还提供了一种可在低温环境进行电热响应的人工肌肉纤维的生产装置,包括:
14.纤维夹持器,用于夹持碳纳米管纤维;
15.注射器,用于向碳纳米管纤维喷射聚己内酯纺丝液,从而在碳纳米管纤维表面均匀包裹聚己内酯纳米纤维;
16.电压控制器,用于在注射器的喷射口与碳纳米管纤维施加静电纺丝所需电压。
17.本发明实施例一方面还提供了一种能够提供低温测试环境的驱动测试装置,包括:
18.测试环境单元,其至少用于容置人工肌肉纤维,并提供对人工肌肉纤维进行驱动测试所需的低温测试环境;
19.信号施加单元,其至少用于向所述人工肌肉纤维施加电信号;
20.测试单元,其至少用于对所述人工肌肉纤维施加负载应力以及监测所述人工肌肉纤维的长度变化、人工肌肉纤维所处测试环境的温度。
21.与现有技术相比,本发明的优点包括:
22.1)本发明实施例提供的一种可在低温环境进行电热响应的人工肌肉纤维,由聚己内酯纳米纤维和碳纳米管纤维制作形成,聚己内酯(pcl)在零度以下环境仍可保持其柔性和弹性,两者结合后可以使所述人工肌肉纤维可在-196℃~-45℃低温环境下工作;
23.2)本发明实施例提供的一种能够提供低温测试环境的驱动测试装置,可以通过加入液氮来降低容置待测人工肌肉纤维的腔室的温度,从而为人工肌肉纤维提供低温工作环境;
24.3)本发明实施例提供的一种能够提供低温测试环境的驱动测试装置,可以实时同步展示驱动与温度的变化,可实现驱动与温度的实时输出;
25.4)本发明实施例提供的一种能够提供低温测试环境的驱动测试装置,组装简易,可以通过改变注入液体种类、体积和温度来改变人工肌肉纤维所处环境的温度,可以进行在不同环境温度下的电热驱动研究。
附图说明
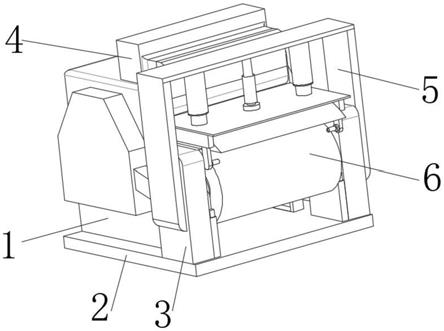
26.图1a是本发明一典型实施案例中提供的一种用于制备人工肌肉纤维的装置的结构示意图;
27.图1b是非晶聚合物的分子链热运动行为中的温度-形变曲线;
28.图1c是本发明一典型实施案例中提供的一种聚己内酯/碳纳米管复合螺旋纤维(即人工人肌肉纤维)的电镜图;
29.图1d是本发明一典型实施案例中提供的一种聚己内酯/碳纳米管复合纤维的截面图;
30.图1e是本发明一典型实施案例中提供的一种复合纤维表面的聚己内酯纳米纤维微观形貌图;
31.图1f是本发明一典型实施案例中提供的一种人工肌肉纤维在连续经历24h、48h、72h、96h、120h的高温-低温环境交替循环后的驱动量随温度变化的曲线;
32.图2是本发明一典型实施案例中提供的一种能够提供低温测试环境的驱动测试装置的结构示意图;
33.图3是本发明一典型实施案例中提供的一种人工肌肉纤维电热驱动能力的低温测试方法的流程示意图;
34.图4是本发明实施例2中用于容置待测人工肌肉纤维的第一腔室内的环境温度随时间变化的曲线图;
35.图5是本发明实施例3中用于容置待测人工肌肉纤维的第一腔室内的环境温度随时间变化的曲线图;
36.图6a是本发明实施例4中用于容置待测人工肌肉纤维的第一腔室内的环境温度随时间变化的曲线图;
37.图6b是本发明实施例4中待测人工肌肉纤维的驱动量、施加的电压随时间变化的曲线图;
38.图7a是本发明实施例5中用于容置待测人工肌肉纤维的第一腔室内的环境温度随时间变化的曲线图;
39.图7b是本发明实施例5中待测人工肌肉纤维的驱动量、施加的电压随时间变化的曲线图。
具体实施方式
40.鉴于现有技术中的不足,本案发明人经长期研究和大量实践,得以提出本发明的技术方案。如下将对该技术方案、其实施过程及原理等作进一步的解释说明。
41.本发明实施例提供了一种可在零度以下的低温环境进行电热响应的人工肌肉纤维以及可改变纤维所处环境温度的电热驱动测试装置,该电热驱动测试装置可实时展示驱动及温度的变化,实现在低温环境下进行电热驱动测试,并且可以瞬时改变纤维的温度,同
时还可以进行快速连续的测试,测试简便快速。
42.为了解决材料的耐寒性能差的问题,本发明采用玻璃化转变温度在零度以下的非晶聚合物材料来制备人工肌肉纤维,由于其玻璃化转变温度低,材料在低温下仍然可以保持柔性,从而可以实现人工肌肉纤维在低温环境下工作。
43.为了满足在特定应用场景下的需求,本发明实施例提供了一种制备低温电热响应人工肌肉纤维的方法,本发明实施例采用具有较低玻璃化转变温度(-60℃)的非晶聚合物材料—聚己内酯(pcl)来制备人工肌肉纤维,因其玻璃化转变温度低于0℃,其在低温环境下仍然可以保持柔性;同时,本发明使用碳纳米管纤维作为传递焦耳热的载体,实现电热驱动,并为复合纤维提供一定的力学性能。
44.本发明实施例一方面提供了一种可在低温环境进行电热响应的人工肌肉纤维,包括碳纳米管纤维和聚己内酯纳米纤维,所述聚己内酯纳米纤维均匀包裹碳纳米管纤维并形成核鞘结构,所述人工肌肉纤维整体呈现螺旋结构。
45.在一些较为具体的实施方案中,所述碳纳米管纤维是通过对碳纳米管窄带进行加捻后获得。
46.在一些较为具体的实施方案中,所述聚己内酯纳米纤维在碳纳米管纤维表面有序或无序交织并均匀包裹碳纳米管纤维。
47.在一些较为具体的实施方案中,所述碳纳米管纤维的捻度为10-30turn/cm。
48.本发明实施例一方面还提供了一种可在低温环境进行电热响应的人工肌肉纤维的制备方法,包括:
49.在碳纳米管纤维表面均匀包裹聚己内酯纳米纤维,从而形成复合纤维;
50.对所述复合纤维进行加捻,以使得所述复合纤维整体呈现螺旋结构,从而获得所述人工肌肉纤维。
51.在一些较为具体的实施方案中,所述的制备方法包括:对碳纳米管窄带进行加捻,从而形成所述碳纳米管纤维。
52.在一些较为具体的实施方案中,对所述碳纳米管窄带进行加捻的捻度为10-30turn/cm。
53.在一些较为具体的实施方案中,所述的制备方法包括:利用聚己内酯纺丝液,通过静电纺丝方式在碳纳米管纤维表面均匀包裹聚己内酯纳米纤维。
54.在一些较为具体的实施方案中,所述的制备方法包括:在进行静电纺丝时,纺丝喷头与碳纳米管纤维沿碳纳米管纤维轴向相对运动,同时碳纳米管纤维还绕自身轴线旋转。
55.在一些较为具体的实施方案中,在进行静电纺丝时,使所述聚己内酯纳米纤维饶设在碳纳米管纤维表面且有序或无序交织并均匀包裹碳纳米管纤维。
56.本发明实施例一方面还提供了一种电热驱动仿生驱动器,包括所述的可在低温环境进行电热响应的人工肌肉纤维。
57.在一些较为具体的实施方案中,所述的电热驱动仿生驱动器还包括:连接于所述人工肌肉纤维两端的电极。
58.本发明实施例一方面还提供了一种可在低温环境进行电热响应的人工肌肉纤维的生产装置,包括:
59.纤维夹持器,用于夹持碳纳米管纤维;
60.注射器,用于向碳纳米管纤维喷射聚己内酯纺丝液,从而在碳纳米管纤维表面均匀包裹聚己内酯纳米纤维;
61.电压控制器,用于在注射器的喷射口与碳纳米管纤维施加静电纺丝所需电压。
62.在一些较为具体的实施方案中,所述的生产装置还包括:第一驱动机构,用于驱使注射器沿与碳纳米管纤维轴线平行的方向移动;
63.在一些较为具体的实施方案中,所述的生产装置还包括:第二驱动机构,与纤维夹持器传动连接,并用于驱使碳纳米管纤维还绕自身轴线旋转。
64.本发明实施例一方面还提供了一种能够提供低温测试环境的驱动测试装置,包括:
65.测试环境单元,其至少用于容置人工肌肉纤维,并提供对人工肌肉纤维进行驱动测试所需的低温测试环境;
66.信号施加单元,其至少用于向所述人工肌肉纤维施加电信号;
67.测试单元,其至少用于对所述人工肌肉纤维施加负载应力以及监测所述人工肌肉纤维的长度变化、人工肌肉纤维所处测试环境的温度。
68.在一些较为具体的实施方案中,所述测试环境单元包括:
69.第一腔室,其至少用于容置低温介质;
70.第二腔室,其至少用于容置人工肌肉纤维,至少所述第二腔室的部分设置在所述第一腔室内且与能够与所述低温介质导热配合。
71.在一些较为具体的实施方案中,所述测试环境单元还包括:第三腔室,所述第一腔室和第二腔室设置在所述第三腔室内,且所述第三腔室内还设置有保温介质,至少所述第一腔室被所述保温介质覆盖或包裹。
72.在一些较为具体的实施方案中,所述信号施加单元包括信号输入记录仪,所述信号输入记录仪分别与所述人工肌肉纤维的两端电连接;优选的,所述信号输入记录仪包括直流电源表。
73.在一些较为具体的实施方案中,所述测试单元包括:
74.施力机构,其与所述人工肌肉纤维连接,并用于对所述人工肌肉纤维施加负载应力;
75.温度传感器,其设置在所述第二腔室内,并用于监测所述第二腔室内的环境温度;
76.位移传感器,其用于监测所述施力机构的运动部分的位移。
77.在一些较为具体的实施方案中,所述施力机构可以是载荷等。
78.如下将结合附图以及具体实施案例对该技术方案、其实施过程及原理等作进一步的解释说明,除非特别说明的之外,本发明实施例中所采用的静电纺丝设备、温度传感器、位置传感器、数据采集卡等均可以采用本领域技术人员已知的,其均可以通过市购获得,因此不对其具体的结构和型号作具体的限定。
79.本发明实施例提供的一种可在低温环境进行电热响应的人工肌肉纤维是基于热膨胀的微观分子运动机理实现的,其中,热刺激响应的人工肌肉纤维的工作原理为热胀冷缩,其本质是由于物质内部的粒子(原子)运动会随温度的改变而改变,当温度上升时,粒子的振动幅度加大,使物质产生膨胀;但当温度下降时,粒子的振动幅度便会减少,使物质收缩;非晶聚合物的分子链热运动行为可以总结为如图1b所示的温度-形变曲线,当温度很低
时,体系处于玻璃态,分子链和链段都不能运动,只是构成分子的原子(或基团)在其平衡位置附近作振动;当温度高于玻璃化转变温度且低于粘流温度(熔融温度)时,体系处于高弹态,分子链虽不能移动,但是链段开始运动,表现出高弹性质;当温度继续升高超过熔融温度,体系处于粘流态,整个分子链可以运动而表现出粘流性质。在这三个状态之间的转变过程分别为玻璃化转变区以及粘弹转变区。热致动非晶聚合物的人工肌肉纤维的驱动过程并不仅发生在由高弹态至粘弹转变区这一温度段,而同样可以发生在玻璃化转变区至高弹态,甚至扩展至由玻璃态至粘弹转变区这一宽温度范围段。
80.本发明将热刺激响应驱动的过程扩展至由玻璃态至粘流转变区这一宽温度范围区间内,而人工肌肉纤维能否在低温环境下工作、人工肌肉纤维的工作能否调控至室温或室温以下、人工肌肉纤维的工作温度以及所适应的工作温度是否与其温度-形变曲线有关均非本领域技术人员已知的,本发明首次提出用非晶聚合物的温度-形变曲线来解释热致动非晶聚合物的人工肌肉纤维的驱动过程以及内在原理,并且由此提出一种可在低温环境下工作的人工肌肉纤维的设计制备方法。
81.本发明实施例提供的一种可在低温环境进行电热响应的人工肌肉纤维,是由“聚己内酯/碳纳米管复合纤维”加捻后获得的,而非简单的“碳纳米管纤维 聚己内酯纳米纤维”,本发明实施例提供的聚己内酯/碳纳米管复合纤维中碳纳米管纤维主要起到基体和导体的作用,用于承载聚己内酯纤维,同时在通电时产生焦耳热并提供热源,其中的聚己内酯纳米纤维在聚己内酯/碳纳米管复合纤维中起到刺激响应的作用,在受到热刺激时产生膨胀,从而带动整个聚己内酯/碳纳米管复合纤维发生宏观上的轴向的收缩运动。
82.本发明实施例提供的一种可在低温环境进行电热响应的人工肌肉纤维为螺旋状的复合纤维结构,所述复合纤维中作为内层的碳纳米管纤维用于承载聚己内酯纤维,同时在通电时产生焦耳热,提供热源,作为鞘层的聚己内酯纳米纤维在复合纤维中起到刺激响应的作用,在受到热刺激时产生膨胀,在宏观上纤维的径向发生膨胀,使得螺旋纤维产生解捻趋势,进而带动整个复合纤维发生宏观上的轴向的收缩运动。
83.本发明实施例提供的一种可在低温环境进行电热响应的人工肌肉纤维,具有良好的低温下的电热响应性,这主要得益于本发明构筑的刺激响应材料,且该刺激响应材料是材料和结构共同耦合产生的结果;在响应材料方面,本发明所采用的聚己内酯材料的玻璃化转变温度为-60℃,即该材料在零度以下环境仍可保持高弹态,这些都是其他材料所不具备的特性(其他高分子材料在低温下处于玻璃态);同时,在零度以下环境仍可保持高弹态的特性也是低温驱动所必不可少的条件;在结构构筑方面,本发明在碳纳米管纤维表面形成了3d聚己内酯纳米纤维层,该3d聚己内酯纳米纤维层为多孔三维结构,而多孔三维结构赋予了聚己内酯/碳纳米管复合纤维在低温下的柔韧性,这同样是形成人工肌肉纤维不可或缺的条件;其次,本发明还构筑了宏观上的螺旋结构,螺旋结构会对聚己内酯/碳纳米管复合纤维的体积变化起到放大的作用,使得聚己内酯/碳纳米管复合纤维在轴向上展示出更大的收缩量;基由以上优势共同产生了本发明实施例提供的人工肌肉纤维在低温下具有良好的驱动性能。
84.在一些较为具体的实施方案中,一种可在低温环境进行电热响应的人工肌肉纤维的制备方法,采用如图1a所示的静电纺丝设备制备形成,具体包括如下步骤:
85.1)将碳纳米管窄带进行预加捻,加捻的捻度为10-30turn/cm,直至形成螺旋结构,
从而形成碳纳米管纤维;
86.2)将预加捻之后形成的碳纳米管纤维夹在纤维夹持器21上并打开纤维夹持器21的电源,使其以100-400rpm的转速旋转;
87.3)以静电纺丝设备的注射器22吸取配制好的聚己内酯纺丝液,聚己内酯纺丝液的浓度为10-14wt%,调整注射器针头距碳纳米管纤维的距离为5-10cm,调整注射器的注射推进速度(即纺丝液的注射速度)为0.7-1.5ml/h,注射器的针头平移速度为100-200mm/s,优选为150mm/s;
88.4)通过控制器23设定正负电压为0~22kv,以在碳纳米管纤维表面静电纺丝形成聚己内酯纳米纤维,且使聚己内酯纳米纤维均匀的绕设在所述碳纳米管纤维表面并将碳纳米管纤维完全包裹,从而形成具有核鞘结构的复合纤维;
89.5)将纺丝完毕的复合纤维从纤维夹持器21上取下并进行加捻直至形成均匀的螺旋结构,从而形成所述的人工肌肉纤维。
90.需要说明的是,所述碳纳米管纤维可以是采用浮动催化法生长、湿法纺丝、干法纺丝工艺制备获得的,也可以直接通过市购获得。
91.请参阅图2,一种能够提供低温测试环境的人工肌肉纤维驱动测试装置,包括
92.第一部分为低温炉体部分(即测试环境单元),包括第三腔室2、第一腔室3、第二腔室4,这些用于为纤维的电热驱动测试提供低温工作环境;具体的,所述第二腔室4套设在第一腔室3内,所述第一腔室3、第二腔室4整体设置在第三腔室2内,且所述第三腔室2内还填充有保温棉5等保温介质,所述第二腔室4至少用于容置待测人工肌肉纤维6,所述第一腔室3上设置有注液口1,自注液口1可以向所述第一腔室3内注入液氮;
93.第二部分为施加信号部分(即信号施加单元),施加信号部分包括信号输入记录仪(直流电源表)13,用于施加各种电信号,比如方波信号,所述信号输入记录仪与待测纤维6电连接;
94.第三部分为测试部分(即测试单元),测试部分包括定滑轮8、载荷9、温度传感器7、位移传感器10、数据采集卡12以及电脑11等智能处理设备,测试部分用于将人工肌肉纤维产生的长度变化转换为电压信号的形式输出,以及实时监测纤维与所处的环境温度,其中,所述载荷9经一连接线绕设在滑轮8上并与待测人工肌肉纤维6固定连接,所述温度传感器7设置在所述第二腔室4内,所述温度传感器7还与电脑11连接,所述位移传感器10与数据采集卡12连接,所述数据采集卡12还与电脑11连接。
95.在本实施例中,所述温度传感器7可以是接触式或非接触式温度传感器,所述位移传感器也可以是接触式或非接触式的位置传感器;可以理解的,所述第一腔室、第二腔室以及第三腔室可以分别独立设置在不同的容器中,也可以形成在同一容器中。
96.请参阅图2和图3,一种人工肌肉纤维电热驱动能力的低温测试方法,包括:
97.1)提供如图2所示的一种能够提供低温测试环境的人工肌肉纤维驱动测试装置,将待测人工肌肉纤维放置于第二腔室4中,从人工肌肉纤维6的两端引出银线,并与直流电源表13相连;在人工肌肉纤维6的一端另外用细线从第二腔室4中引出,将其通过几个定滑轮8连接到载荷9上,在第三腔室2与第一腔室3、第二腔室4之间的夹层中放入保温棉5以保温隔热;
98.2)以测试部分进行驱动信号以及温度信号的采集与记录,将非接触位移传感器10
与数据采集卡12进行连接并调试,其距离信号将通过以电压信号的形式存储在电脑11上;将非接触式温度传感器7与电脑11进行连接并调试,温度数据将直接实时地显示并记录在电脑11上;同时打开非接触式温度传感器的测试软件和非接触式位移传感器的数据采集卡12,保证驱动信号与温度信号同步输出记录;
99.3)从第二腔室3的注液口1向第二腔室3中加入液氮,当从注液口1观察到沸腾的液氮时表明注液层内已经加满液氮,此时停止加入液氮,并等待第二腔室4内的温度变化稳定;
100.4)以施加信号部分的直流电源表13向待测人工肌肉纤维6施加不同形式的电信号;
101.5)将所得数据进行保存,通过改变加入液氮的温度以改变待测人工肌肉纤维所处环境的温度,从而可以研究人工肌肉纤维在不同低温环境下的电热驱动性能。
102.如下将结合具体实施案例对该技术方案、其实施过程及原理等作进一步的解释说明,应理解,如下实施例仅是示例性,其仅用于对本发明的技术方案进行解释,而非对本发明的保护范围进行限定。
103.实施例1
104.一种可在低温环境进行电热响应的人工肌肉纤维的制备方法,采用如图1a所示的静电纺丝设备制备形成,具体包括如下步骤:
105.1)将碳纳米管窄带进行预加捻,加捻的捻度为12turn/cm,直至形成螺旋结构,从而形成碳纳米管纤维;
106.2)将预加捻之后形成的碳纳米管纤维夹在纤维夹持器21上并打开纤维夹持器21的电源,使其以300rpm的转速旋转;
107.3)以静电纺丝设备的注射器22吸取配制好的聚己内酯纺丝液,聚己内酯纺丝液的浓度为14wt%,调整注射器针头距碳纳米管纤维的距离为7cm,调整注射器的注射推进速度(即纺丝液的注射速度)为1ml/h,注射器的针头平移速度为150mm/s,静电纺丝的环境温度为25℃、湿度为50%;
108.4)通过控制器23设定正负电压为0~22kv,以在碳纳米管纤维表面静电纺丝形成聚己内酯纳米纤维,且使聚己内酯纳米纤维均匀的绕设在所述碳纳米管纤维表面并将碳纳米管纤维完全包裹,从而形成具有核鞘结构的复合纤维;
109.5)将纺丝完毕的复合纤维从纤维夹持器21上取下并进行加捻直至形成均匀的螺旋结构,从而形成所述的人工肌肉纤维,本实施例所获的人工肌肉纤维的电镜图、截面电镜图和微观形貌图如分别如图1c、图1d、图1e所示。
110.对本实施例所获人工肌肉纤维的循环稳定性进行测试,同一根人工肌肉纤维在连续经历24h、48h、72h、96h、120h的高温-低温环境交替循环后的驱动量随温度变化的曲线如图1f所示,由图1f可以看出,该多条曲线都保持了良好的重合性,这表明在经历120h连续交替的高温-低温环境后,本发明实施例所制备获得的人工肌肉纤维仍能保持最初性能。
111.实施例2
112.提供如图2所示的一种能够提供低温测试环境的人工肌肉纤维驱动测试装置,将所述待测人工肌肉纤维所处的第二腔室4内的环境温度调节至25℃;
113.将非接触式温度传感器7提前调试好,打开电脑11上对应的数据采集软件,开始连
续采集第二腔室4内的温度,并实时显示并记录在电脑上;
114.从注液口1向第一腔室3中加入液氮,以改变第二腔室4内的温度,得到第二腔室4内温度随时间的实时变化曲线如图4所示。
115.实施例3
116.在实施例1中,加入液氮后等待足够长的时间,第二腔室4内的温度会因为液氮层消耗殆尽而缓慢的上升(保持装置整体处于室温25℃环境下),待液氮全部消耗完毕,从注液口1向第一腔室3内倒入50℃的蒸馏水,电脑上将会实时显示并记录第二腔室4内的温度,得到第二腔室4内温度随时间的实时变化曲线如图5所示。
117.实施例4
118.一种人工肌肉纤维电热驱动能力的低温测试方法,包括:
119.取采用浮动催化法制备的碳纳米管纤维,通过静电纺丝的方式在其外部均匀包裹聚合物纳米纤维,然后过度加捻形成螺旋结构,从而得到复合纤维,即人工肌肉纤维,并将所述复合纤维作为测试样品置于第二腔室4中,从其两端引出的银线分别连接直流电源表13的正负极,复合纤维一端引出的细线连接载荷9;
120.将数据采集卡12提前调试好,将载荷9与非接触位移传感器10之间保持平衡,在电脑11上打开相应的非接触式位移传感器的软件;
121.将非接触式温度传感器7提前调试好,整体装置处于室温25℃的环境中,打开非接触式温度传感器7和电脑上对应的数据采集软件,开始连续采集第二腔室4内复合纤维附近的温度,并实时显示并记录在电脑上;
122.从注液口1向第一腔室3中加入液氮,电脑上将会实时显示第二腔室4内复合纤维附近温度,等待温度降低并趋于稳定;
123.在直流电源表13上设置输出电压为4v(即施加在复合纤维两端的电压),使用计时器手动控制复合纤维的通电时间5s,循环通电三次,得到在相同的方波电压下,复合纤维随时间的实时变化曲线如图6a、图6b所示。
124.实施例5
125.一种人工肌肉纤维电热驱动能力的低温测试方法,包括:
126.采用浮动催化法制备的碳纳米管纤维,通过静电纺丝的方式在其外部均匀包裹聚合物纳米纤维,然后过度加捻形成螺旋结构,得到复合纤维,将所述复合纤维作为测试样品放入第二腔室4中,从其两端引出的银线分别连接直流电源表的正负极,复合纤维一端引出的细线连接载荷9;
127.将数据采集卡12提前调试好,将载荷9与非接触位移传感器10之间保持平衡,在电脑上打开相应的非接触式位移传感器的软件;
128.将非接触式温度传感器7提前调试好,整体装置处于室温25℃的环境中,打开非接触式温度传感器和电脑上对应的数据采集软件,开始连续采集第二腔室4内复合纤维附近的温度,并实时显示并记录在电脑上;
129.从注液口1向第一腔室3中加入液氮,电脑上将会实时显示第一腔室内复合纤维附近温度,等待温度降低并趋于稳定;
130.在直流电源表上设置不同的输出电压(即施加在纤维两端的电压),使用计时器手动控制纤维的通电时间5s,得到在不同的方波电压下,人工肌肉纤维随时间的实时变化曲
线如图7a、图7b所示。
131.本发明实施例提供的一种可在低温环境进行电热响应的人工肌肉纤维,由聚己内酯纳米纤维和碳纳米管纤维制作形成,聚己内酯(pcl)在零度以下环境仍可保持其柔性和弹性,两者结合后可以使所述人工肌肉纤维可在-196℃~-45℃低温环境下工作。
132.本发明实施例提供的一种能够提供低温测试环境的驱动测试装置,可以通过加入液氮来降低容置待测人工肌肉纤维的腔室的温度,从而为人工肌肉纤维提供低温工作环境。
133.本发明实施例提供的一种能够提供低温测试环境的驱动测试装置,可以实时同步展示驱动与温度的变化,可实现驱动与温度的实时输出。
134.本发明实施例提供的一种能够提供低温测试环境的驱动测试装置,组装简易,可以通过改变注入液体种类、体积和温度来改变人工肌肉纤维所处环境的温度,可以进行在不同环境温度下的电热驱动研究。
135.应当理解,上述实施例仅为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。