1.本发明涉及导弹制导与控制技术领域,尤其是一种导弹非奇异固定时间滑模制导律 的设计方法。
背景技术:
2.随着现代战争的发展,导弹的命中精度越来越高,业界逐渐对于导弹的制导控制系 统提出了新的要求。如在反舰导弹、反坦克导弹的设计中,希望导弹能够以一定的角度 击中目标,从而最大化地发挥战斗部的性能,增强对目标的破坏杀伤能力,且希望制导 系统能够快速响应,保证固定时间收敛。为了提高落角约束下导弹末端对目标的击中概 率,充分发挥导弹战斗部的作战效能,如何设计具有强鲁棒性且快速收敛的制导律成为 了导弹制导控制系统设计的关键问题。
3.滑模变结构控制理论由于其具有快速反应、无需系统辨识、高鲁棒性等优点,被广 泛应用于导弹制导系统的设计过程中。近些年来,滑模变结构控制在制导控制律设计领 域得到了即为广泛的应用。为了实现全局滑模,保证制导系统在整个响应过程的鲁棒性, 终端滑模也被应用于导弹制导律的设计当中。考虑到实际的末制导过程十分有限且短暂, 能够实现固定时间内收敛的终端滑模是未来制导系统研究的一个热点。固定时间控制的 概念最早由polykov于2012年提出,相比于有限时间控制,固定时间控制无论系统初 始状态如何,系统收敛时间都具有一致有界性,即系统收敛时间上界只与控制律参数相 关。双幂次趋近律的应用一方面可以加快滑模面的收敛速度,同时还可以克服抖振问题。 固定时间一致收敛扰动观测器由于其对实时扰动信息的高精度估计,且具有强鲁棒性, 在制导系统中可以实现对目标运动信息的高精度快速估计。
技术实现要素:
4.本发明所要解决的技术问题在于,提供一种导弹非奇异固定时间滑模制导律的设计 方法,可以保证导弹在固定时间内满足落角、导引头视场角约束,以期望的落角精确命 中目标。
5.为解决上述技术问题,本发明提供一种导弹非奇异固定时间滑模制导律的设计方法, 包括如下步骤:
6.(1)建立导弹再入末端制导段纵向平面内弹目之间相对运动学方程;
7.(2)对于步骤(1)所得到的纵向平面内弹目之间相对运动学方程,要求状态变量x1、x2在固定时间内趋近于零;
8.(3)根据步骤(2)设计的固定时间非奇异终端滑模面以及其趋近律形式,设计控 制律;
9.(4)针对步骤(3)的未知扰动项,设计固定时间干扰观测器;
10.(5)针对步骤(3)和步骤(4)中所设计的控制器以及干扰观测器,利用lyapunov 稳定性理论证明其稳定性及固定时间收敛特性,并计算收敛时间上界。
11.优选的,步骤(1)中,建立导弹再入末端制导段纵向平面内弹目之间相对运动学 方程具体为:
[0012][0013]
式中,vm和v
t
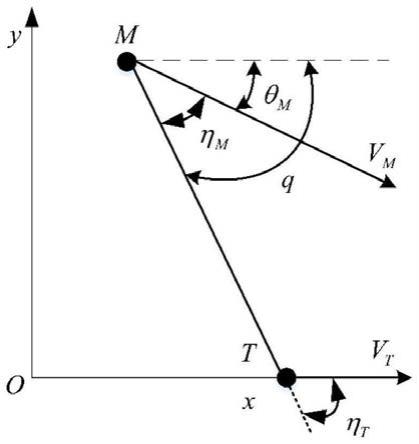
分别为导弹和目标飞行速度,ηm=q-θm,η
t
=q-θ
t
,r为弹目距离, 为接近速度,q和分别为视线角和视线角速率,水平基线沿逆时针方向旋转到弹目 视线上时q值为正;
[0014]
选取状态变量x1=q-qd,其中qd为导弹末端期望落角,记为导 弹法向过载,对x1和x2求导并将(1)式代入可以得到
[0015][0016]
式中,为未知扰动项。
[0017]
优选的,步骤(2)中,对于步骤(1)所得到的不确定纵向平面制导系统方程,要 求状态变量x1、x2在固定时间内趋近于零具体为:
[0018]
设计新型快速收敛固定时间非奇异终端滑模面如下
[0019]
s=x2 k0x1 k1sig
α
(x1) k2φ(x1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0020][0021]
式中,k0,k1,k2>0为正常数,sig
α
(x1)=|x1|
α
sign(x1),α>1>β>0,ω1=ι
β-γ
,γ>0, ι>0为很小的正常数;
[0022]
对于式(3)中的滑模面,设计其趋近律形式为
[0023][0024]
式中,λ0,λ1,λ2>0为正常数,m>1>n>0,从式(5)中看出,当r较大时,趋近 速度较慢,当r
→
0时,趋近速度迅速增加,保证制导系统快速进入滑动模态。
[0025]
优选的,步骤(3)中,根据步骤(2)设计的固定时间非奇异终端滑模面以及其趋 近律形式,设计控制律具体为:
[0026][0027]
式中,为式(2)中未知扰动项δ的估计值。
[0028]
由于导弹打击的目标为地面固定或低速运动的目标,因此假设未知扰动项δ有界, 即存在未知有界正常数δ,满足||δ||<δ。
[0029]
优选的,步骤(4)中,针对步骤(3)的未知扰动项,设计固定时间干扰观测器具 体
为:
[0030][0031]
式中,和分别为滑模变量s和未知扰动项δ的估计值,l为待设计参数需满足 l≥δ,参数κ1,κ2需满足s2 κ1s κ2=0为hurwitz,当观测器观测目标加速度在固定 时间收敛后,可完全补偿未知扰动项,即满足
[0032]
优选的,步骤(5)中,针对步骤(3)和步骤(4)中所设计的控制器以及干扰观 测器,利用lyapunov稳定性理论证明其稳定性及固定时间收敛特性,并计算收敛时间 上界具体为:
[0033]
选取lyapunov函数
[0034][0035]
对v1求导有
[0036][0037]
式中,系统满足固定时间收敛,其中收敛时间上界为
[0038][0039]
系统收敛时间与系统初始状态无关,只与控制器参数相关;
[0040]
当系统到达滑模面后,将沿滑模面运动直到收敛到原点,此时滑模面满足
[0041]
s=x2 k0x1 k1sig
α
(x1) k2φ(x1)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0042]
考虑到则下式成立
[0043][0044]
考虑以下lyapunov函数
[0045][0046]
当x1≥ι时,对v2求导,并将式(12)代入得到
[0047][0048]
式中,可知系统满足固定时间收敛,收敛时间上界为
[0049][0050]
由式(14)及(15)得,系统状态变量x1在固定时间内进入区间|x1<ι内,对于x2满足
[0051]
|x2|≤k0ι k1ι
α
k2ι
β
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0052]
当|x1|<ι时,根据滑模面式(3)及式(14)可得
[0053][0054]
将ω1表达式代入上式并化简,同样对于不等式|x2|≤k0ι k1ι
α
k2ι
β
亦成立;
[0055]
根据式(9)和式(14)可知,制导系统在控制律(6)以及扰动观测器(7)的作 用下是稳定的,且满足固定时间收敛特性,系统状态将在固定时间内收敛至滑动模态, 然后沿着滑模面运动;对于视线角可在固定时间收敛到其期望值,视线角速率也可收敛 稳定在任意小区域内,系统收敛上界为t
max
=t
1max
t
2max
。
[0056]
本发明的有益效果为:本发明基于固定时间控理论以及滑模变结构控制方法,针对 落角约束下的纵向平面内导弹精确制导问题,设计了固定时间非奇异终端滑模控制器, 能够保证闭环制导系统状态的固定时间快速收敛特性,且收敛时间上界与系统初始状态 无关,并且具有应对不确定干扰的强鲁棒性,以及满足落角约束和脱靶量要求的制导精 确性,实现对目标的精确打击。
附图说明
[0057]
图1为本发明导弹再入末端制导段纵向平面内弹目之间相对运动关系图。
[0058]
图2为本发明三维空间内弹目相对运动轨迹图。
[0059]
图3为本发明x-y平面内弹目相对运动轨迹图。
具体实施方式
[0060]
一种导弹非奇异固定时间滑模制导律的设计方法,包括如下步骤:
[0061]
(1)建立导弹再入末端制导段纵向平面内弹目之间相对运动学方程;
[0062]
(2)对于步骤(1)所得到的纵向平面内弹目之间相对运动学方程,要求状态变量 x1、x2在固定时间内趋近于零;
[0063]
(3)根据步骤(2)设计的固定时间非奇异终端滑模面以及其趋近律形式,设计控 制律;
[0064]
(4)针对步骤(3)的未知扰动项,设计固定时间干扰观测器;
[0065]
(5)针对步骤(3)和步骤(4)中所设计的控制器以及干扰观测器,利用lyapunov 稳定性理论证明其稳定性及固定时间收敛特性,并计算收敛时间上界。
[0066]
本发明实施例提供了纵向制导平面内基于固定时间非奇异终端滑模制导方法的
导 弹制导系统的设计,主要涉及到制导系统多个模块的设计,包括弹目相对运动状态空间 模型的设计,非奇异固定时间终端滑模面的设计,基于弹目距离的改进双幂次趋近律的 设计,以及对目标运动信息进行估计的固定时间一致收敛扰动观测器的设计。制导系统 的输入包括纵向平面内导弹和目标的位置信息,用以计算弹目视线距离,以及导弹运动 速度在纵向平面内的大小以及方向。输出信息为纵向平面内的导弹法向过载。
[0067]
以某型导弹末端制导为例,首先建立弹目相对运动状态空间模型,制导系统输入包 括:导弹飞行速度vm,初始弹道倾角θm,期望终端落角qd,导弹初始位置(xm,ym)以 及目标初始位置(x
t
,y
t
)以及相应的初始速度v
t
,对应的表达式为:
[0068][0069]
式中,ηm=q-θm为弹目视线与导弹弹道方向之间的夹角,η
t
=q-θ
t
为弹目视线与目 标运动速度方向之间的夹角。r为弹目距离,q为弹目视线角,其可以通过下述表达式 求得:
[0070][0071]
进一步,考虑到落角约束的条件时,选取弹目视线角与期望视线角的差值作为其中 一个状态变量x1=q-qd;考虑到对打击脱靶量的要求时,选取弹目视线角速率作为另 一个状态变量结合式(18),在此基础上建立制导系统状态空间模型,对应的表 达式为:
[0072][0073]
式中,目标运动信息,考虑为系统状态空间的未知扰动项,其值将在后面 步骤中由扰动观测器观测得到。
[0074]
进一步,基于固定时间控制理论以及积分滑模控制方法,对上述制导系统状态空间 模型设计固定时间非奇异终端滑模面,对应的表达式为:
[0075]
s=x2 k0x1 k1sig
α
(x1) k2φ(x1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0076][0077]
式中,k0,k1,k2>0为正常数,sig
α
(x1)=|x1|
α
sign(x1),α>1>β>0,ω1=ι
β-γ
,γ>0, ι>0为很小的正常数。φ(x1)采用分段函数形式的设计方法,通过选取合适的ι值,可以 避免制导系统由于状态量较小时出现的奇异现象。可以保证滑模制导系统在制导末段为 全域工作状态。
[0078]
进一步,为了保证上述设计的滑模面也在固定时间内收敛,且要求控制输入尽量减 弱抖振现象,需对滑模面的趋近律进行设计,这里采用双幂次趋近律的形式,并将弹目 距离引入到趋近律的设计当中,进一步加快滑模面的收敛速度,改进后的双幂次趋近律 表
输入不会产生奇异现象,降低了系统抖振;本发明考虑了导弹制导末段的落角约束问题, 能够更有效地约束终端落角,提高制导导弹对目标的毁伤能力。
[0091]
本发明基于固定时间控制理论,设计了固定时间滑模,并针对该滑模设计了双幂次 趋近律,加快了系统状态轨迹到达滑模面的速度。采用本发明所涉及的滑模面以及趋近 律形式可以保证导弹的视线角及视线角速率快速收敛,且收敛时间与系统初始状态无关, 只与制导律设计参数相关,能够大幅度地提升导弹的制导性能。
[0092]
本发明设计了固定时间一致收敛扰动观测器,无需精确知道目标运信息。且扰动观 测器的估计误差可以在固定时间内收敛。
[0093]
控制器设计为通用输入设计,可以应用在线性和非线性系统中,满足多种类型导弹 的控制输入要求,适用性较为广泛。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
