一种基于真空吸盘的多自由度机械手教学平台系统
【技术领域】
1.本实用新型涉及一种基于真空吸盘的多自由度机械手教学平台系统。
背景技术:
2.在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
3.随着现代电气控制技术的发展,生产加工技术领域对自动化的要求不断提高,需要结合不同机械和电气的连贯性和实用性,借助典型的生产加工设备进行相关专业的教学和实训训练。而目前各中职学校和高等院校自动化实验教学实训设备多为结构单一,用途单一的指示灯加仪表类和演示模型类来展现控制过程,缺乏与企业一线真实相关联的高度仿真设备,不能充分满足现有的教学实训,如采用进口或国产机械手成本很高,不利于学校的教学工作的展开。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足之处,提供一种动作可靠、结构精巧、工作效率高,反应速度快,动作协调匹配,达到控制要求,具备实用的能力,极具有推广价值的基于真空吸盘的多自由度机械手教学平台系统。
5.本实用新型的目的是这样实现的:
6.一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于其包括平台,所述的平台上设有操作控制组件、开关电源组件和控制阀组件,所述的平台还设有:
7.一工件放置台;
8.及将工件放置台上的工作夹起旋转一定角度的夹料旋转机构;
9.及将夹料旋转机构送来的工件输送到下一工位的夹料移动组件;
10.及将夹料移动组件送来的工件进行翻转的翻转机构;
11.及将翻转机构翻转后的工件输出并与翻转机构垂直设置的输出工件组件。
12.如上所述的一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于夹料旋转机构包括摆动气缸,摆动气缸设有可由摆动气缸带动其摆动的摆动座,摆动座上设有前后伸缩气缸,前后伸缩气缸的前端设有上下伸缩气缸,上下伸缩气缸的输出端设有真空吸盘组件。
13.如上所述的一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于夹料
移动组件包括磁耦合气缸,磁耦合气缸的输出端设有托盘。
14.如上所述的一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于翻转机构包括翻转架,翻转架上设有夹料组件,平台上设有翻转座,翻转架一侧设有带动翻转架翻转并穿过翻转座的转轴,平台上还设有带动转轴旋转的驱动装置。
15.如上所述的一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于夹料组件包括一对夹料杆,该对夹料杆相对的一侧均设有夹料槽,翻转架上设有带动该对夹料杆收缩和松开的夹料杆驱动装置。
16.如上所述的一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于输出工件组件包括滑动座,滑动座上设有一对限位杆,滑动座一侧设有丝杆电机,丝杆电机的丝杆插入到滑动座的另一侧,丝杆连接有可由丝杆带动其滑动的滑动座托盘,滑动座托盘套装在限位杆上。
17.如上所述的一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于平台边缘设有线槽。
18.如上所述的一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于平台上还设有导轨。
19.如上所述的一种基于真空吸盘的多自由度机械手教学平台系统,其特征在于操作控制组件包括触摸屏,按钮总成和plc控制系统。
20.本实用新型的有益效果是:
21.本实用新型采用plc控制系统和触摸屏智能控制,是典型的机-电-气一体化的自动控制系统。具有动作可靠、结构精巧、工作效率高的特点。机械手能按要求准确的抓取放置物体,系统具有反应速度快,动作协调匹配,达到控制要求,具备实用的能力。同时作为一种典型的实验实训教学平台,极具有推广价值。
【附图说明】
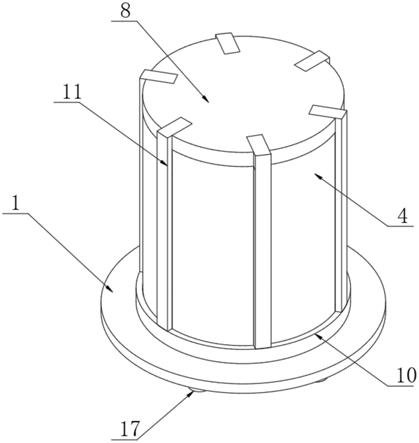
22.图1是本实用新型的立体图;
23.图2是本实用新型的另一方向的立体图。
【具体实施方式】
24.下面结合附图对本实用新型作进一步说明:
25.一种基于真空吸盘的多自由度机械手教学平台系统,其包括平台1,所述的平台1上设有操作控制组件2、开关电源组件3和控制阀组件4,所述的平台1还设有:
26.一工件放置台5;
27.及将工件10放置台上的工作夹起旋转一定角度的夹料旋转机构6;
28.及将夹料旋转机构送来的工件输送到下一工位的夹料移动组件7;
29.及将夹料移动组件送来的工件进行翻转的翻转机构8;
30.及将翻转机构翻转后的工件输出并与翻转机构垂直设置的输出工件组件9。
31.其中本实用新型的操作控制组件2包括触摸屏21,按钮总成22和plc控制系统23。
32.本实用新型的夹料旋转机构6包括摆动气缸61,摆动气缸61设有可由摆动气缸61带动其摆动的摆动座62,摆动座62上设有前后伸缩气缸63,前后伸缩气缸63的前端设有上
下伸缩气缸64,上下伸缩气缸64的输出端设有真空吸盘组件65。
33.本实用新型的夹料移动组件7包括磁耦合气缸71,磁耦合气缸的输出端设有托盘72。
34.本实用新型的翻转机构8包括翻转架81,翻转架81上设有夹料组件82,平台1上设有翻转座83,翻转架81一侧设有带动翻转架81翻转并穿过翻转座的转轴,平台1上还设有带动转轴旋转的驱动装置85。
35.其中夹料组件82包括一对夹料杆821,该对夹料杆821相对的一侧均设有夹料槽822,翻转架81上设有带动该对夹料杆收缩和松开的夹料杆驱动装置823。
36.本实用新型的输出工件组件9包括滑动座91,滑动座91上设有一对限位杆92,滑动座91一侧设有丝杆电机93,丝杆电机93的丝杆94插入到滑动座91的另一侧,丝杆94连接有可由丝杆带动其滑动的滑动座托盘95,滑动座托盘95套装在限位杆92上。
37.本实用新型的平台1边缘设有线槽11,线槽可由平台的边缘直接翻起折弯形成,在线槽内外两侧各设有多个孔,方便布线。
38.本实用新型的平台1上还设有导轨12,导轨12用于安装各种电子元器件和空气开关等。
39.本实用新型的平台1上还设有多个传感件和感应开关,用于检测工作10,以及工件10的移动和定位。
40.本实用新型的工作原理是:先将工件10放置在工件放置台5上,夹料旋转机构6的前后伸缩气缸63向前伸出,上下伸缩气缸64向下伸出,由真空吸盘组件65吸住工件10,摆动气缸61带动摆动座62旋转90度,并将工件10放置在夹料移动组件7的托盘72,夹料移动组件7的磁耦合气缸71伸出,将工件10送到翻转机构8附近,翻转机构8的夹料组件82夹住工件10,驱动装置85带动转轴旋转,也就带动翻转架81翻转,使夹料组件82也翻转180度,并将工件10送到滑动座托盘95上,丝杆电机93工作,带动滑动座托盘95滑动,完成运送工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。