1.本公开涉及货物配送和打包技术领域,具体地,涉及一种取货柜和配货系统。
背景技术:
2.随着o2o(online to offline)订单的持续增长,商品货物的交易量越来越大。在线下取货之前,通常由人工对货物进行打包,然后交付给取货人员,此种方式已经不能满足大额交易量的需求,而且人工成本高,交接货效率低。
技术实现要素:
3.本公开的目的是提供一种取货柜和配货系统,该取货柜能够解决相关技术中交接货效率低及人工成本高的问题。
4.为了实现上述目的,本公开提供一种取货柜,所述取货柜包括:柜体,所述柜体上设置有用于投放货物的供货口和用于放置已打包货物的第一取货窗口;和打包装置,设置在所述柜体中并用于将所述货物装入打包袋中打包,所述打包装置包括用于接收来自所述供货口的所述货物的货物进口和用于将打包后的所述已打包货物输送至所述第一取货窗口的输送机构。
5.可选地,所述第一取货窗口设置在所述柜体的第一侧面上,所述供货口设置在所述柜体的与所述第一侧面相对的第二侧面上。
6.可选地,所述第一取货窗口的数量为多个且呈阵列排列,且每个所述第一取货窗口的进口处均设置有位于所述柜体内部的引导通道,所述引导通道用于引导所述已打包货物倾斜滑落至所述第一取货窗口内。
7.可选地,所述柜体内设置有存储工位、开袋工位、封口工位,所述打包装置包括:存储机构,设置在所述存储工位处且用于存储并排布置的多个所述打包袋,多个所述打包袋的袋口朝向一致;取袋机构,用于将所述存储工位处的所述打包袋传送至所述开袋工位处;开袋机构,设置在所述开袋工位处且用于打开所述打包袋的袋口;装货机构,位于所述开袋工位的上方且具有所述货物进口,用于将通过所述货物进口进入的所述货物输送至所述打包袋的袋口中;以及封口机构,设置在所述封口工位处且用于对盛装有所述货物的打包袋进行封口,所述输送机构用于在所述开袋工位、封口工位和所述第一取货窗口之间传送所述打包袋。
8.可选地,所述存储机构包括开口向上的容纳仓、限位板和压板,所述限位板固连在所述容纳仓中,所述压板可移动地设置在所述容纳仓中,以靠近或远离所述限位板,多个所述打包袋的袋口朝上夹设在所述限位板和所述压板之间。
9.可选地,所述容纳仓内设置有用于检测所述压板相对于所述限位板的距离的传感器,以通过所述压板与所述限位板之间的距离检测所述容纳仓中剩余的所述打包袋的数量。
10.可选地,所述取袋机构包括驱动组件和第一抓取件,所述第一抓取件用于可释放
地抓取所述打包袋,所述驱动组件用于在所述存储工位和所述开袋工位之间移动所述第一抓取件。
11.可选地,所述开袋机构包括能够相互靠近或远离的两组第二抓取件,两组所述第二抓取件分别用于可释放地抓取所述打包袋的所述袋口的相对两侧,以打开所述打包袋。
12.可选地,所述装货机构包括接货斗,所述接货斗的顶端具有所述货物进口、底端具有货物出口,所述货物进口的相对两侧分别设置有挡板和打包通道,所述打包通道用于引导所述货物倾斜滑落至所述货物进口中。
13.可选地,所述货物进口的上方设置有理货机构,所述理货机构包括支架和第一推板,所述第一推板可移动地设置在支架上,以能够将倚靠在所述挡板上的货物推入所述货物进口中。
14.可选地,所述柜体内还设有袋满检测工位,所述打包装置包括设置在所述袋满检测工位处的能够相互靠近或远离的两个检测夹板,两个所述检测夹板用于夹持在所述打包袋的封装线上方的袋体的两侧,所述输送机构将盛装有所述货物的打包袋自所述开袋工位传送至所述袋满检测工位,并在通过所述两个检测夹板检测到所述打包袋内的货物未超过封装线时,所述输送机构将盛装有货物的打包袋输送至所述封口工位,在检测到所述打包袋内的货物超过所述封装线时,所述输送机构将盛装有货物的打包袋输送至第一取货窗口中。
15.可选地,所述封口机构的上方设置有打印装置,所述打印装置包括固定架、打印机和第四抓取件,所述打印机固连在所述固定架上,所述第四抓取件可移动地设置在所述固定架上,以用于可释放地抓取所述打印机打印的物品标签并能够将所述物品标签移动至位于所述封口工位处的或位于所述袋满检测工位处的打包袋的袋口处。
16.可选地,所述输送机构包括第二轨道机构和用于支撑所述打包袋的支撑座,所述支撑座可移动地设置在所述第二轨道机构上且设置有用于可释放地抓取所述打包袋的底面的第三抓取件,所述支撑座上设置有推货机构,所述推货机构用于将盛装有货物的打包袋推入所述第一取货窗口中。
17.可选地,所述支撑座和所述第三抓取件之间设置有震动机构,所述震动机构用于在所述货物落至所述打包袋内后带动所述打包袋震动,以对所述打包袋中的物品进行梳理。
18.本公开的另一方面还提供一种配货系统,包括上述的取货柜和货物输送装置,该货物输送装置用于将货物投放至所述取货柜的供货口。
19.通过上述技术方案,即本公开提供的取货柜,在柜体中设置用于对货物自动打包的打包装置以及在柜体上设置供取货人员取货的窗口,能够实现货物打包过程及货物传递的自动化,显著地提高了交接货效率和降低了人工成本。具体的工作中,货物通过柜体上的供货口投入,并经由打包装置对货物进行自动打包,随后将货物传送到第一取货窗口,取货人员到达取货柜所在地点后,能够直接取货,避免了中间的等待过程,交接货效率显著提高,并且打包过程不依赖人工,可以实现24小时不间断营业。因此,本公开提供的取货柜能够解决相关技术中交接货效率低及人工成本高的问题,且具有自动化程度高的优点。
20.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
21.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
22.图1是本公开示例性实施方式中提供的取货柜的立体图;
23.图2是本公开示例性实施方式中提供的取货柜的另一角度的立体图;
24.图3是本公开示例性实施方式中提供的取货柜的去掉部分壳体后的立体图;
25.图4是本公开示例性实施方式中提供的取货柜的配货装置的立体图;
26.图5是本公开示例性实施方式中提供的取货柜的送货器的主视图;
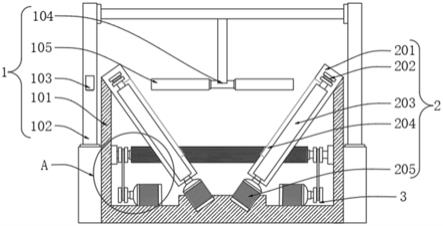
27.图6是本公开示例性实施方式中提供的取货柜的去掉部分壳体后的另一角度的立体图;
28.图7是本公开示例性实施方式中提供的取货柜的打包装置的主视简图;
29.图8是本公开示例性实施方式中提供的取货柜的打包装置的另一状态的主视简图;
30.图9是本公开示例性实施方式中提供的取货柜的打包装置的另一状态的主视简图;
31.图10是本公开示例性实施方式中提供的取货柜的打包装置的侧视简图;
32.图11是本公开示例性实施方式中提供的取货柜的打包装置的另一状态的侧视简图;
33.图12是本公开示例性实施方式中提供的取货柜的打包装置的封口机构和检测夹板的位置关系示意图;
34.图13是本公开示例性实施方式中提供的打包袋的结构示意图。
35.附图标记说明
36.1-柜体;101-供货口;102-第一取货窗口;103-第二取货窗口;104-引导通道;105-人机交互窗口;110-第一侧面;120-第二侧面;2-输送机构;210-第二轨道机构;220-支撑座;211-第三导轨;212-第四导轨;230-第三抓取件;240-推货机构;241-支撑架;242-第二推板;250-震动机构;3-配货装置;310-第一轨道机构;311-第一轨道;320-送货器;321-传送带;322-侧挡板;323-后挡板;330-定位传感器;4-打包通道;5-非打包通道;6-存储工位;7-开袋工位;8-封口工位;9-存储机构;910-容纳仓;920-限位板;930-压板;10-打包袋;1001-袋口;1002-封装线;11-取袋机构;111-驱动组件;1111-第一导轨;1112-安装座;1113-驱动单元;112-第一抓取件;12-开袋机构;121-第二抓取件;122-第二导轨;13-装货机构;131-货物进口;132-接货斗;133-货物出口;134-挡板;14-封口机构;15-理货机构;151-第一推板;16-袋满检测工位;17-检测夹板;18-打印机;19-第四抓取件;20-固定架。
具体实施方式
37.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
38.在本公开中,在未作相反说明的情况下,使用的方位词如“内、外”是指相对于部件或结构本身轮廓的内、外。此外,需要说明的是,所使用的术语如“第一、第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。另外,在参考附图的描述中,不同附图中
的同一标记表示相同的要素。
39.根据本公开的第一方面,提供一种取货柜。参考图1至图13所示,取货柜包括柜体1和打包装置。柜体1上设置有用于投放货物的供货口101和用于放置已打包货物的第一取货窗口102,打包装置设置在柜体1中并用于将货物装入打包袋10中打包,打包装置包括用于接收来自供货口101的货物的货物进口131和用于将打包后的已打包货物输送至第一取货窗口102的输送机构2。
40.通过上述技术方案,在柜体1中设置用于对货物自动打包的打包装置以及在柜体1上设置供取货人员取货的窗口,能够实现货物打包过程及货物传递的自动化,显著地提高了交接货效率和降低了人工成本。具体的工作中,货物通过柜体1上的供货口101投入,并经由打包装置对货物进行自动打包,随后将货物传送到第一取货窗口102,取货人员到达取货柜所在地点后,能够直接取货,避免了中间的等待过程,交接货效率显著提高,并且打包过程不依赖人工,可以实现24小时不间断营业。因此,本公开提供的取货柜能够解决相关技术中交接货效率低及人工成本高的问题,且具有自动化程度高的优点。此处需要说明的是,自供货口101进入的货物,指的是未装入打包袋10中的货物,例如未装袋的药品、衣物、水果或书籍等;已打包货物指的是已经装入到打包袋10中的货物,包括货物本身和打包袋10,也可以理解为盛装有货物的打包袋10,包括盛装有货物且已封口的打包袋或盛装有货物且未封口的打包袋。
41.该取货柜可以用于自动化的货物交接流程,即可以用于无人仓储,例如可以应用在快递、物流行业。例如,在一种应用场景中,该取货柜可以用于线下药店的药物配送,以通过自动化设备和智能化系统,赋能传统线下药店,帮助商家降本增效,并且订单全流程自动化不依赖人工,可以实现药店24小时不间断营业。在另一些应用场景中,该取货柜同样适用于例如服装、超市商品等线下门店,适用范围广。
42.在一些实施方式中,参考图1和图2所示,第一取货窗口102设置在柜体1的第一侧面110上,供货口101设置在柜体1的与第一侧面110相对的第二侧面120上。这样,将第一取货窗口102和供货口101设置在柜体1的相对两侧,便于将取货侧和供货侧分开,互不干扰。
43.在一些实施方式中,第一取货窗口102的数量为多个且呈阵列排列,以增加柜体1的存储容量,例如,图1示例性地示出了多个第一取货窗口102沿柜体1的高度方向依次布置的实施方式。另外,参考图1所示,柜体1上还可以设置人机交互窗口105,用于系统与用户之间的信息交互。其中,第一取货窗口102的外侧还设置有柜门,用于打开或关闭第一取货窗口102;第一取货窗口102中设置有传感器,用于检测第一取货窗口102是否有货物。
44.在一些具体的实施方式中,如图6所示,每个第一取货窗口102的进口处均设置有位于柜体1内部的引导通道104,引导通道104用于引导已打包货物倾斜滑落至第一取货窗口102内。其中,引导通道104可以构造为与第一取货窗口102的底面对接的且向上倾斜延伸的引导斜板,在便于已打包货物滑落的同时,能够防止第一取货窗口中的已打包货物掉落至柜体1内。
45.打包装置可以根据实际应用需求以任意合适的方式构造,例如,在一些实施方式中,参考图7至图13所示,柜体1内设置有存储工位6、开袋工位7、封口工位8,打包装置包括存储机构9、取袋机构11、开袋机构12、装货机构13以及封口机构14。其中,存储机构9设置在存储工位6处且用于存储并排布置的多个打包袋10,多个打包袋10的袋口1001朝向一致;取
袋机构11用于将存储工位6处的打包袋10传送至开袋工位7处;开袋机构12设置在开袋工位7处且用于打开打包袋10的袋口1001;装货机构13位于开袋工位7的上方且具有货物进口131,用于将通过货物进口131进入的货物输送至打包袋10的袋口1001中;封口机构14设置在封口工位8处且用于对盛装有货物的打包袋10进行封口,输送机构2用于在开袋工位7、封口工位8和第一取货窗口102之间传送打包袋10。
46.在进行打包时,参考图7至图12所示,取袋机构11从存储工位6拿取打包袋10,并将打包袋10输送至开袋工位7,由位于开袋工位7的开袋机构12打开打包袋10的袋口1001,袋口1001打开后,由装货机构13将货物装入打包袋10中,然后由输送机构2将盛装有货物的打包袋10移动至封口机构14进行封口,并在封口后由输送机构2输送至第一取货窗口102处,完成货物打包和传递过程,取货人员达到指定位置后可直接从相应的第一取货窗口102处取货。在此过程中,开袋机构12将打包袋运输至开袋机构12后,可返回存储工位6处继续拿取打包袋,以进行下一轮货物的打包过程,能够提高货物打包的效率。
47.存储机构9可以根据实际应用需求以任意合适的方式构造,例如,参考图11所示,存储机构9可以包括开口向上的容纳仓910、限位板920和压板930,限位板920固连在容纳仓910中,压板930可移动地设置在容纳仓910中,以靠近或远离限位板920,多个打包袋10的袋口1001朝上夹设在限位板920和压板930之间。通过此种方式,随着取袋机构11不断地拿取打包袋10,容纳仓910中的打包袋10的数量减少,通过压板930朝向限位板920移动,可以始终保持打包袋10的袋口1001朝上设置,避免打包袋10倾倒。其中,取袋机构11可以从限位板920所在的一侧拿取打包袋10。
48.为了便于及时向容纳仓910中补充打包袋10,在柜体1的第一侧面110和/或第二侧面120上可以设置可启闭的检修门,以通过该检修门向容纳仓910中补充打包袋10。另外,该检修门也可用于对柜体1内各机构的维护保养。此外,为了便于放置打包袋10,容纳仓910可移动地设置在柜体1上,以便在打开检修门时,能够将容纳仓910拉出,并在放置打包袋10后,将容纳仓910推回原位。
49.为了及时检测容纳仓910中打包袋10的数量,以便及时补充打包袋10,在一些实施方式中,容纳仓910内可以设置有用于检测压板930相对于限位板920的距离的传感器,以通过压板930与限位板920之间的距离检测容纳仓910中剩余的打包袋10的数量。通过检测压板930和限位板920之间的距离,结合打包袋10折叠后的厚度,能够计算出打包袋10的数量或大概数量,以便及时补充打包袋10。其中,传感器可以为位置传感器、磁栅式传感器或其它任意合适的传感器,本公开对此不作具体限定。传感器可以沿压板930的移动方向设置多个,例如分别用于打包袋10的袋满检测、余袋检测以及无袋检测等,这样可以在例如余袋10%检测时,发出提醒,本公开对此不作具体限定。
50.压板930可以以任意合适的方式可移动地设置在容纳仓910中,例如,存储机构9还可以包括第一电机和第一传动机构,第一电机通过第一传动机构驱动压板930移动,第一传动机构可以为丝杠传动机构,也可以为同步带传动机构,本公开对此不作具体限定。
51.取袋机构11可以根据实际应用需求以任意合适的方式构造,例如,参考图7和图11所示,取袋机构11包括驱动组件111和第一抓取件112,第一抓取件112用于可释放地抓取打包袋10,驱动组件111用于在存储工位6和开袋工位7之间移动第一抓取件112。其中,第一抓取件112可以为例如第一真空吸盘,该第一真空吸盘可以通过管路连接真空泵,以通过吸持
的方式抓取打包袋10。在使用时,驱动组件111驱动第一抓取件112移动到存储工位6,第一真空吸盘吸附在打包袋10的袋口1001一侧,然后驱动组件111驱动吸附有打包袋10的第一真空吸盘朝向开袋工位7移动,并在开袋工位7将该打包袋10交接给开袋机构12。在另一些实施方式中,第一抓取件112也可以为能够可释放地抓取打包袋10的夹子,以通过夹持的方式抓取打包袋,本公开对此不作具体限定。
52.在一些具体的实施方式中,参考图10所示,驱动组件111可以包括第一导轨1111、可移动地设置在第一导轨1111上的安装座1112,通过安装座1112在第一导轨1111上的移动实现第一抓取件112在存储工位6和开袋工位7之间的移动。其中,第一导轨1111上可以设置第二电机和第二传动机构,第二电机通过第二传动机构驱动安装座1112移动,第二传动机构可以为丝杠传动机构,或同步带传动机构,或齿轮齿条传动机构,本公开对此不作具体限定。另外,开袋工位7可以设置在存储工位6的上方,这样,第一导轨1111可以沿竖直方向延伸,安装座1112在竖直方向上往复运动,能够简化驱动组件111的构造,减少占用空间和安装座1112的移动行程。
53.为了便于第一抓取件112更方便的抓取打包袋10,安装座1112上设置用于驱动第一抓取件112相对于安装座移动的驱动单元1113,该驱动单元1113可以包括安装架、安装板、第三电机和第三传动机构,安装架固连于安装座,第三电机和第三传动机构设置在安装架上,且第三电机通过第三传动机构驱动安装板移动,第一抓取件112设置在安装板上。其中,第一抓取件112的数量可以为多个,以便更稳定地抓取打包袋10。
54.开袋机构12可以根据实际应用需求以任意合适的方式构造,例如,参考图10和图11所示,开袋机构12包括能够相互靠近或远离的两组第二抓取件121,两组第二抓取件121分别用于可释放地抓取打包袋10的袋口1001的相对两侧,以打开打包袋10。在这种情况下,取袋机构11将打包袋10传送至开袋工位7后,将打包袋10朝向其中一组第二抓取件121移动,并在打包袋10贴靠上其中一组第二抓取件121后,例如贴上如图10所示的位于左侧的第二抓取件121后,位于左侧的第二抓取件121抓住打包袋10,第一抓取件112释放打包袋10并返回存储工位6重新拿取打包袋10,此时位于右侧的第二抓取件121向左移动以抓住打包袋10,并在抓住打包袋10后向右移动以打开打包袋10的袋口。其中,每组第二抓取件121可以包括多个第二抓取件121,以更稳定的抓取打包袋10。第二抓取件121可以采用第二真空吸盘,以通过吸持的方式抓取打包袋10,也可以采用夹子,以通过夹持的方式抓取打包袋,本公开对此不作具体限定。
55.此外,开袋机构12可以包括第二导轨122,位于左侧的第二抓取件121固连于第二导轨122,位于右侧的第二抓取件121可移动地设置在第二导轨122上,位于右侧的第二抓取件121可以通过例如皮带传动机构或齿轮齿条传动机构或丝杠传动机构驱动,本公开在此不作具体限制。
56.装货机构13可以根据实际应用需求以任意合适的方式构造,例如,参考图11所示,装货机构13包括接货斗132,接货斗132的顶端具有货物进口131、底端具有货物出口133,货物进口131的相对两侧分别设置有挡板134和打包通道4,打包通道4用于引导货物倾斜滑落至货物进口131中。来自供货口101的货物掉落至打包通道4或通过配货装置3(将在下文进行详细描述)运送至打包通道4后,沿着打包通道4倾斜滑落至接货斗132,并经由货物出口133掉落至打包袋10的袋口1001中。挡板134用于防止货物掉落至接货斗132之外。其中,货
物出口133的口径小于打包袋10在打开状态下的袋口1001的口径,以便于货物准确掉落至打包袋10中。
57.为了防止货物依靠在挡板134和打包通道4之间,在一些实施方式中,参考图11所示,货物进口131的上方设置有理货机构15,理货机构15包括支架和第一推板151,第一推板151可移动地设置在支架上,以能够将倚靠在挡板134上的货物推入货物进口131中。通过此种方式,可能有效防止货物堆积在货物进口131处。其中,第一推板151可以通过例如气缸或电动推杆推动,具体的,第一推板151可以沿竖直方向移动,以更准确地推动货物。
58.考虑到打包袋10在装满货物时不便于进行封口,因此在一些实施方式中,参考图7和图12所示,柜体1内还设有袋满检测工位16,打包装置包括设置在袋满检测工位16处的能够相互靠近或远离的两个检测夹板17,两个检测夹板17用于夹持在打包袋10的封装线1002上方的袋体的两侧,输送机构2将盛装有货物的打包袋10自开袋工位7传送至袋满检测工位16,并在通过两个检测夹板17检测到打包袋10内的货物未超过封装线1002时,输送机构2将盛装有货物的打包袋10输送至封口工位8,在检测到打包袋10内的货物超过封装线1002时,输送机构2将盛装有货物的打包袋10输送至第一取货窗口102中。因此,可以通过两个检测夹板17检测打包袋10中的货物是否超过封装线1002,并根据检测结果,选择性地将盛装有货物的打包袋10输送至封口工位8继续封口或将盛装有货物的打包袋10直接输送至第一取货窗口102。这样,可以防止在打包袋10在装满货物后封口时,损坏封口机构14。其中,可以根据两个检测夹板17之间的距离判断打包袋10内的货物是否超过封装线1002,例如,在打包袋10内的货物超出封装线1002时,两个检测夹板17会被超出部分的货物挡住,使得两个检测夹板17之间的距离大于某一设定值,而在大于该设定值时,即可判断打包袋10内的货物超出封装线;同时,当打包袋10内的货物未超出封装线1002时,两个检测夹板17基本上能够接近闭合,使得两个检测夹板17之间的距离小于某一设定值,而在小于该设定值时,即可判断打包袋10内的货物未超出封装线。上述的两个设定值可以相同或不同,本公开对此不作具体限定。另外,两个检测夹板17之间的距离可以通过设置传感器来检测,例如位置传感器或激光测距传感器等,本公开对此不作具体限定。另外,两个检测夹板17可以分别通过例如气缸或电动推杆驱动,本公开对此不作具体限定。
59.在一些实施方式中,封口机构14可以为自动多路订书机,参考图7和图12所示,该自动多路订书机具有多路钉针组,示例性的,可设置4~7列钉针组,实现对袋口1001的多位置固定。该自动多路订书机可暂存钉针达到1000个,钉操作时间小于2秒,从而可满足大销售量下的打包需求。
60.在一些实施方式中,参考图12所示,封口机构14的上方设置有打印装置,打印装置包括固定架20、打印机18和第四抓取件19,打印机18固连在固定架20上,第四抓取件19可移动地设置在固定架20上,以用于可释放地抓取打印机18打印的物品标签并能够将物品标签移动至位于封口工位8处的或位于袋满检测工位16处的打包袋10的袋口1001处。输送机构2将盛装有货物的打包袋10输送至袋满检测工位16后,在两个检测夹板17检测到打包袋10内的货物超过封装线1002时,第四抓取件19抓取打印机18打印的物品标签并将该物品标签移动至袋满检测工位16,然后释放物品标签,物品标签掉落至打包袋10中,随后输送机构2将盛装有货物的打包袋10运送至第一取货窗口102;在两个检测夹板17检测到打包袋10内的货物未超过封装线1002时,输送机构2将盛装有货物的打包袋10运送至封口工位8处,同时,
第四抓取件19抓取打印机打印的物品标签并将该物品标签移动至封口工位8处,然后释放物品标签,物品标签掉落至打包袋10中,随后封口机构14对打包袋10的袋口1001进行封口。其中,物品标签上具有货物的对应信息,例如可以包括物品的名称、数量、配送货地址以及联系方式等。第四抓取件19可以为可以采用第三真空吸盘,以通过吸持的方式抓取物品标签,也可以采用夹子,以通过夹持的方式抓取物品标签,本公开对此不作具体限定。
61.输送机构2可以根据实际应用需求以任意合适的方式构造,例如,参考图7至图9所示,输送机构2包括第二轨道机构210和用于支撑打包袋10的支撑座220,支撑座220可移动地设置在第二轨道机构210上且设置有用于可释放地抓取打包袋10的底面的第三抓取件230。参考图8和图11所示,盛装有货物的打包袋10在开袋工位7处并经由开袋机构12开袋后,货物从接货斗132中掉落至打包袋10中,此时,输送机构2的支撑座220可以移动至打包袋10的下方,以承载打包袋10,防止因货物掉落造成打包袋10掉落或撕毁,并且支撑座220通过第三抓取件230抓取打包袋10的底面,便于运输过程中防止打包袋10掉落。第三抓取件230可以采用第四真空吸盘,以通过吸持的方式抓取并稳固打包袋10。其中第二轨道机构210可以包括沿水平方向延伸的第三导轨211和沿竖直方向延伸的第四导轨212,第四导轨212可移动地设置在第三导轨211上,支撑座220可移动地设置在第四导轨212上。通过第三导轨211和第四导轨212可以实现支撑座220在竖直方向以及在水平方向上的移动,以能够在各个工位之间移动。另外,支撑座220可以通过例如同步带传动机构、齿轮齿条传动机构或丝杠传动机构驱动以在第四导轨212上移动,同理,第四导轨212可以通过例如同步带传动机构、齿轮齿条传动机构或丝杠传动机构驱动以在第三导轨211上移动,本公开对此不作具体限定。
62.在一些实施方式中,参考图11所示,支撑座220和第三抓取件230之间设置有震动机构250,震动机构250用于在货物落至打包袋10内后带动打包袋10震动,以对打包袋10中的物品进行梳理。这样,在货物掉落至打包袋10的过程中,通过震动能够使得打包袋10中的货物放置更加紧凑,使货物尽可能地堆积在打包袋10的下方,使得盛装有货物的打包袋10通过输送机构2运输时,更稳定,不易倾倒。其中,震动机构250可以以任意合适的方式构造,例如,震动机构250可以包括气缸,通过气缸的活塞杆上下往复运动实现震动过程。
63.此外,为了便于输送机构2将盛装有货物的打包袋10输送至第一取货窗口102中,在一些实施方式中,参考图7和图12所示,支撑座220上设置有推货机构240,推货机构240用于将盛装有货物的打包袋10推入第一取货窗口102中。推货机构240可以以任意合适的方式构造,例如,推货机构240可以包括支撑架241和可移动地设置在支撑架241上的第二推板242,该第二推板242用于将盛装有货物的打包袋10推入第一取货窗口102中,其中,第二推板242可以通过例如气缸驱动或同步带传动机构或齿轮齿条传动机构可移动地设置在支撑架241上,本公开对此不作具体限定。在一些具体的实施方式中,第二推板242可以用于推动打包袋10的底部,以使得打包袋10的底部首先进入引导通道104,然后顺着引导通道104倾斜滑落,以防止未封口的打包袋10中的货物掉落。
64.基于上述实施方式,本公开示例性地描述该取货柜的工作过程,具体如下:
65.取袋机构11通过第一抓取件112在存储工位6拿取打包袋10(如图11所示),并将该打包袋10移动至开袋工位7;
66.在开袋工位7,打包袋10由第一抓取件112交接至位于左侧的第二抓取件121(如图
10所示),随后位于右侧的第二抓取件121向左移动以抓取打包袋10并在抓取后向右移动以打开打包袋10(如图11所示),此时,输送机构2的支撑座220移动至打包袋10的下方并通过第三抓取件230抓取打包袋10的底面,与此同时,货物经由供货口101、货物进口131进入接货斗132,并经由货物出口133掉落至打包袋10中,在货物掉落至打包袋10的过程中,震动机构250开始振动,以梳理打包袋10中的货物;
67.在装货完毕后,输送机构2将盛装有货物的打包袋10运送至袋满检测工位16(如图12所示),在该工位,通过两个检测夹板17检测打包袋10内的货物是否超过封装线1002,并根据检测结果,选择性地将盛装有货物的打包袋10输送至封口工位8继续封口或将盛装有货物的打包袋10直接输送至第一取货窗口102;
68.在打包袋10中的货物未超过封装线1002时,输送机构2将该打包袋10输送至封口工位8,第四抓取件19抓取打印机18打印的物品标签,并将该物品标签移动至封口工位8处,然后释放物品标签,物品标签掉落至打包袋10中,随后封口机构14对打包袋10的袋口1001进行封口;随后输送机构2将封口后的打包袋10输送至对应的第一取货窗口102处,并通过推货机构240的第二推板242将封口后的打包袋10推入第一取货窗口102中;
69.在打包袋10中的货物超过封装线1002时,输送机构2将未封口的打包袋10输入至第一取货窗口102处,并通过推货机构240的第二推板将未封口的打包袋10推入第一取货窗口102中。
70.基于本公开第一方面提供的取货柜,本公开第二方面还提供一种配货系统,包括上述的取货柜和货物输送装置,该货物输送装置用于将货物投放至取货柜的供货口101。其中,该货物输送装置可以是能够在例如仓库或无人微仓与取货柜之间输送货物的agv小车或皮带输送机构,本公开在此不作具体限定。
71.在本公开第一方面提供的取货柜中,在柜体1中设置用于对货物自动打包的打包装置以及在柜体1上设置供取货人员取货的窗口,能够实现货物打包过程及货物传递的自动化,显著地提高了交接货效率和降低了人工成本。在此基础上,为了满足客户的不同需求,例如能够根据客户的打包需求和不打包需求进行选择性地对货物打包,鉴于此,本公开第二方面还提供一种取货柜。
72.在本公开第二方面提供的取货柜中,参考图1至图13所示,该取货柜包括柜体1、打包装置以及配货装置3。柜体1上设置有用于投放货物的供货口101、用于放置已打包货物的第一取货窗口102以及用于放置未打包货物的第二取货窗口103;打包装置设置在柜体1中并用于将货物装入打包袋10中打包,打包装置包括用于接收货物的货物进口131和用于将打包后的已打包货物输送至第一取货窗口102的输送机构2;配货装置3设置在柜体1中并用于在供货口101和第二取货窗口103之间以及在供货口101和货物进口131之间运送货物。
73.通过上述技术方案,在柜体1上设置用于放置已打包货物的第一取货窗口102和用于放置未打包货物的第二取货窗口103,并在柜体1中设置用于对货物自动打包的打包装置,以及向打包装置和第二取货窗口103分配货物的配货装置,能够根据用户的需求,对货物选择性地进行自动打包,不仅避免了资源浪费,且降低了人工成本,提高了交接货效率。具体的工作中,货物通过柜体1上的供货口101投入,配货装置根据客户的不同需求,将需要打包的货物传送给打包装置进行打包,并在打包后由打包装置将打包后的已打包货物传送到第一取货窗口102;而不需要打包的货物,由配货装置直接传送到第二取货窗口103,由
此,取货人员到达取货柜所在地点后,选择相应的取货窗口能够直接取货,避免了中间的等待过程,交接货效率显著提高,并且打包过程和配货过程不依赖人工,可以实现24小时不间断营业。因此,本公开提供的取货柜能够解决相关技术中交接货效率低及人工成本高的问题,且具有自动化程度高的优点。
74.在一些实施方式中,参考图1和图2所示,第一取货窗口102和第二取货窗口103设置在柜体1的第一侧面110上,供货口101设置在柜体1的与第一侧面110相对的第二侧面120上。这样,将两种取货窗口和供货口101设置在柜体1的相对两侧,便于将取货侧和供货侧分开,互不干扰。
75.在一些实施方式中,参考图1所示,柜体1的第一侧面110上设置有人机交互窗口105,用于系统与用户之间的信息交互。第一取货窗口102和第二取货窗口103分别设置在人机交互窗口105的两侧,并且第一取货窗口102的数量为多个且呈阵列布置。图1示例性地示出了,多个第一取货窗口102沿柜体1的高度方向依次布置,第二取货窗口103设有一个,此处应当理解的是,多个第一取货窗口102可以以任意合适的方式布置,第二取货窗口103也可以设置多个,以增加柜体1的存储容量,本公开对此不作具体限定。第一取货窗口102和第二取货窗口103的外侧均设置有柜门,以用于打开或关闭对应的取货窗口;第一取货窗口102和第二取货窗口103中均设置有传感器,以用于检测第一取货窗口102中是否有货物。
76.在一些实施方式中,参考图3所示,柜体1内设置有打包通道4和非打包通道5,打包通道4用于引导货物倾斜滑落至货物进口131内,有利于引导需要打包的货物掉落至货物进口131中;非打包通道5用于引导货物倾斜滑落至第二取货窗口103内,有利于引导不需要打包的货物直接掉落至第二取货窗口中;非打包通道5位于打包通道4的上方,能够将打包装置设置在柜体1内的下部空间,有利于打包装置的布置,同时有利于降低柜体1的中心,使其放置更加稳定。其中,打包通道4和非打包通道5均包括设置在两侧的挡板,以防止货物滑落过程中,掉落至柜体1中。
77.配货装置3可以根据实际应用需求以任意合适的方式构造,例如,参考图4和图5所示,配货装置3包括第一轨道机构310和可移动地设置在第一轨道机构310上的送货器320,送货器320具有用于接收来自供货口101的货物的第一位置、用于将货物投放至货物进口131的第二位置以及用于将货物投放至第二取货窗口103的第三位置。
78.在一些具体的实施方式中,第一轨道机构310上设置有用于检测送货器320的位置的定位传感器330,定位传感器的数量为多个且至少包括位于所述第一位置的第一传感器、位于所述第二位置的第二传感器以及位于所述第三位置的第三传感器。通过该多个传感器能够准确定位送货器320的位置,以便于送货器320准确地与供货口101、打包通道4以及非打包通道5对接。
79.送货器320可以根据实际应用需求以任意合适的方式构造,例如,参考图4和图5所示,送货器320包括传送带321和挡板组件,传送带321用于由后向前地将货物输送给第二取货窗口103或货物进口131,挡板组件包括设置在传送带321两侧的两个侧挡板322和固定在传送带321上且跟随传送带321同步移动的后挡板323,后挡板323、两个侧挡板322和传送带321共同在后挡板323的前方限定用于放置货物的容纳空间。其中,由后向前指的是图5中箭头所指的方向,参考图5所示,在卸货时,传送带321将货物输送给第二取货窗口103或货物进口131,即,将货物由右向左传输,同时在传输过程中,后挡板323跟随传送带321同步移
动,能够将货物全部推入第二取货窗口103或货物进口131中;在卸货完成后,传送带321反向转动,同时带动后挡板323返回原位,并且,此种状态下,在送货器320移动到第一位置时,货物能够从供货口101直接掉落至传送带321上。
80.在一些具体的实施方式中,传送带321环绕在主动辊和从动辊上,主动辊与电机的输出端驱动连接,这样,传送带321能够跟随主动辊的转动而传动。
81.轨道机构310可以根据实际应用需求以任意合适的方式构造,例如,参考图3所示,第一轨道机构310包括第一轨道311和设置在第一轨道311上的驱动机构,送货器320可移动地设置在第一轨道311上,驱动机构用于驱动送货器320移动。其中,供货口101、打包通道4和非打包通道5可以沿竖直方向间隔地布置,使得第一轨道311沿竖直方向延伸,这样,仅需要一条轨道就可以实现送货器320在三者之间的移动,能够精简结构以减少成本,同时能够减少占用空间。驱动机构可以以任意合适的方式构造,例如,驱动机构可以采用电机驱动的皮带传动机构或齿轮齿条传动机构或丝杠传动机构,本公开对此不作具体限定。
82.打包装置可以根据实际应用需求以任意合适的方式构造,例如,柜体1内设置有存储工位6、开袋工位7、封口工位8,打包装置包括存储机构9、取袋机构11、开袋机构12、装货机构13以及封口机构14。其中,存储机构9设置在存储工位6处且用于存储并排布置的多个打包袋10,多个打包袋10的袋口1001朝向一致;取袋机构11用于将存储工位6处的打包袋10传送至开袋工位7处;开袋机构12设置在开袋工位7处且用于打开打包袋10的袋口1001;装货机构13位于开袋工位7的上方且具有货物进口131,用于将通过货物进口131进入的货物输送至打包袋10的袋口1001中;封口机构14设置在封口工位8处且用于对盛装有货物的打包袋10进行封口,输送机构2用于在开袋工位7、封口工位8和第一取货窗口102之间传送打包袋10。上述打包装置的具体实施方式均可以采用本公开第一方面提供的取货柜的打包装置的实施方式,本公开在此不再赘述。
83.基于本公开第三方面提供的取货柜,本公开第四方面还提供一种配货系统,包括本公开第三方面提供的取货柜和货物输送装置,该货物输送装置用于将货物投放至取货柜的供货口101。其中,该货物输送装置可以是能够在例如仓库或无人微仓与取货柜之间输送货物的agv小车或皮带输送机构,本公开在此不作具体限定。在此需要说明的是,这里根据本公开第四方面提供的配货系统可以以根据本公开第二方面提供的配货系统的方式构造,但本公开不限于此,其还可以以其它不同的方式构造,以满足实际应用的需求。
84.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
85.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
86.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。