1.本实用新型涉及水处理行业净水厂平流沉淀池相关技术领域,尤其涉及一种平流沉淀池刮泥机行车实时定位装置。
背景技术:
2.净水厂平流沉淀池,是指投加过凝聚剂的原水在矩形池内自进口至出口作水平流动的过程中,絮粒得以沉淀去除的水处理构筑物。在净水厂水处理工艺中,原水加药后的混合与絮凝沉淀做用都是在平流沉淀池进行的。行车式虹吸泥机一般用于给水工程平流沉淀池,也可用于其他类似工程的平流式沉淀池。一端进水,另一端集水槽出水,往复行走吸排池底污泥。
3.传统的吸泥机的行走控制,都是粗放型,即按运行人员经验,定时手动或按预设固定间隔时间定时,吸泥机进行一个往复的运行,只是在起点和终点通过限位开关反馈位置信息,其运行中间位置因无有效的定位措施将不会反馈回中控室。行车行走位置无有效的感知和定位手段,浪费时间和水电资源。
技术实现要素:
4.本实用新型提供了一种平流沉淀池刮泥机行车实时定位装置,将rtk多系统导航定位模块和泥水测厚装置安装在刮泥机行车上,通过控制器实时读取行车的实时位置信息,驱动行车行走路程,并通过无线通讯装置将行车的实时位置信息发送到中控室,减少除污泥的时间,提高效率,并大大减少用水量、用电量。
5.为了达到上述目的,本实用新型采用以下技术方案实现:
6.一种平流沉淀池刮泥机行车实时定位装置,包括平流式沉淀池、轨道式刮泥行车、平流池泥水测厚装置、行车控制装置和行车定位装置,所述轨道式刮泥行车在平流式沉淀池中往复行走;所述平流泥水测厚装置连接行车控制装置,测量平流式沉淀池污泥厚度;所述的行车控制装置和行车定位装置安装在轨道式刮泥行车上,控制轨道式刮泥行车的往复运动。
7.所述轨道式刮泥行车底部安装虹吸式吸泥机,车身左右两侧均安装立柱,立柱上分别安装行车控制装置和行车定位装置。
8.所述平流池泥水测厚装置采用泥水界面仪,安装在平流式沉淀池内的仪表挂架上,实时测量平流式沉淀池污泥入口处污泥厚度。
9.所述行车控制装置包括控制箱、电控箱和天线,所述电控箱安装在轨道式刮泥行车右侧立柱上方,电控箱内安装电池和驱动器,电池为其他元件提供电源,驱动器驱动轨道式刮泥行车行走;所述控制箱安装在轨道式刮泥行车左侧立柱的中部,控制箱内安装控制器、通讯单元和接线端子,控制器带有一个rs232接口和多个di/do接口,控制器连接接线端子,接线端子连接行车定位装置、平流池泥水测厚装置和电控箱内的驱动器,对驱动器发出控制命令,驱使轨道式刮泥行车的往复行走;所述通讯单元一端连接控制器,另一端连接天
线,将信息实时传送至中控室,所述的天线安装在轨道式刮泥行车左侧立柱上端。
10.所述行车定位装置包括rtk多系统导航定位模块和限位开关,所述的rtk多系统导航定位模块安装在轨道式刮泥行车左侧立柱控制箱的背面;所述的限位开关安装在平流式沉淀池的行车起始和结束极限位置,限位开关信号线连接控制箱内接线端子,再连接控制器;所述的rtk多系统导航定位模块连接控制器rs232接口,将接收到的导航定位信号传送至控制器内。
11.与现有技术相比,本实用新型的有益效果是:
12.1)利用rtk多系统导航定位模块,实时定位轨道式刮泥行车,大大减少了清除污泥的时间,提高了工作效率;
13.2)实时定位轨道式刮泥行车和泥水测厚装置的配合使用,也大大降低了用水量和用电量,减少了成本消耗。
附图说明
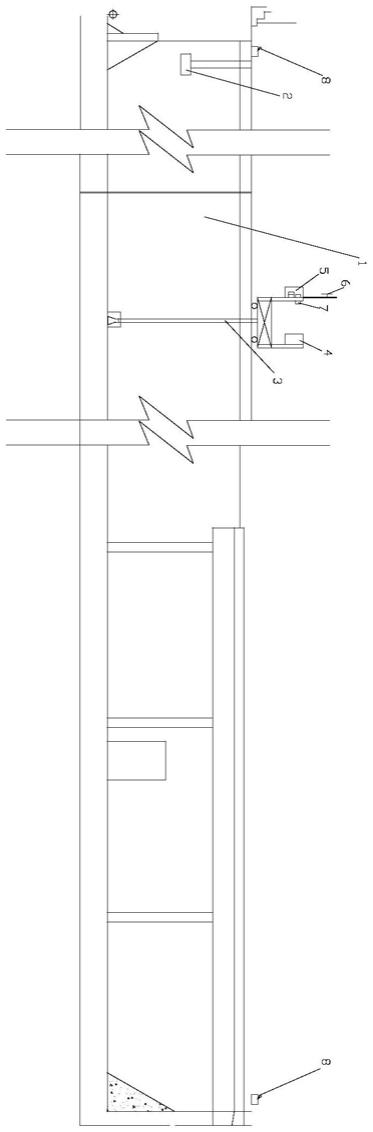
14.图1是本实用新型结构示意图。
15.图2是本实用新型结构框图。
16.图3是本实用新型控制结构图。
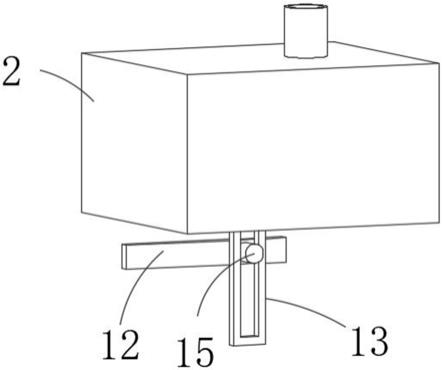
17.图4是本实用新型轨道式刮泥行车示意图。
18.图中:1.平流式沉淀池 2.平流池泥水测厚装置 3.轨道式刮泥行车 4.电控箱 5.控制箱 6.天线 7.rtk多系统导航定位模块 8.限位开关
具体实施方式
19.下面结合附图对本实用新型的具体实施方式作进一步说明:
20.见图2,是本实用新型的结构框图。本实用新型一种平流沉淀池刮泥机行车实时定位装置,包括平流式沉淀池1、轨道式刮泥行车3、平流池泥水测厚装置2、行车控制装置和行车定位装置,所述轨道式刮泥行车3在平流式沉淀池1中往复行走;所述平流泥水测厚装置2连接行车控制装置,测量平流式沉淀池1污泥厚度;所述的行车控制装置和行车定位装置安装在轨道式刮泥行车3上,根据污泥厚度和行车定位装置控制轨道式刮泥行车3的往复运动行程和次数。
21.见图1,所述轨道式刮泥行车3底部安装虹吸式吸泥机,车身左右两侧均安装立柱,立柱上分别安装行车控制装置和行车定位装置,车身和立柱均高于平流式沉淀池1水平面。
22.所述平流池泥水测厚装置2采用泥水界面仪,安装在平流式沉淀池1内的仪表挂架上,实时测量平流式沉淀池1污泥入口处污泥厚度。
23.见图3,所述行车控制装置包括控制箱5、电控箱4和天线6,所述电控箱4安装在轨道式刮泥行车右侧立柱上方,电控箱4内安装电池和驱动器,电池为其他元件提供电源,驱动器驱动轨道式刮泥行车3行走;所述控制箱5安装在轨道式刮泥行车左侧立柱的中部,控制箱5内安装控制器、通讯单元和接线端子,控制器带有一个rs232接口和多个di/do接口,控制器连接接线端子,接线端子连接行车定位装置、平流池泥水测厚装置2和电控箱内4的驱动器,对驱动器发出控制命令,驱使轨道式刮泥行车3的往复行走;所述通讯单元采用无线通讯模块,一端连接控制器,另一端连接天线6,将信息实时传送至中控室,所述的天线6
安装在轨道式刮泥行车3左侧立柱上端。
24.所述行车定位装置包括rtk多系统导航定位模块7和限位开关8,所述的rtk多系统导航定位模块7安装在轨道式刮泥行车3左侧立柱控制箱5的背面,rtk多系统导航定位模块7采用skg12ur芯片,同时支持北斗、gps和glonass的卫星接收,同时支持bds/gps或gps/glonanss双星系统,配合全国北斗增强网的高精度定位服务,可以实现分米级定位精度;所述的限位开关8安装在平流式沉淀池1的行车起始和结束极限位置,限位开关8信号线连接控制箱5内接线端子,再连接控制器;所述的rtk多系统导航定位模块7连接控制器rs232接口,将接收到的导航定位信号传送至控制器内。
25.以下实施例在以本实用新型技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。下述实施例中所用方法如无特别说明均为常规方法。
26.【实施例】
27.如图1所示,所述平流池泥水测厚装置2安装在平流式沉淀池1的仪表安装架上,测量平流式沉淀池1内污水入口处污泥厚度,平流池泥水测厚装置2的信号线连接至行车控制装置内控制箱5的接线端子上,再从接线端子连接控制器,行车控制装置安装在轨道式刮泥行车3上,电控箱4安装在轨道式刮泥行车3的右侧立柱上,控制箱5安装在左侧立柱上,左侧立柱控制箱5的背面安装rtk多系统导航定位模块7,rtk多系统导航定位模块7连接控制器rs232接口,将接收到的导航定位信号传送至控制器内,左侧立柱的上端安装天线6,天线6连接控制箱内的通讯单元,通讯单元通过天线6将行车定位信息实时传送至中控室,控制连接驱动器,驱动轨道式刮泥车3的往复行走。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。