1.本发明涉及一种电力机车转向架构架装配设备,特别是一种多振源系统的故障诊断系统及方法。
背景技术:
2.高速列车是我国提升运输能力和带从产业发展的重要工具,其转向架旋转部件的振动信号监测和故障诊断对保障安全性与可持续性具有重要工程价值。转向架结构复杂、振源数多、空间密集,使其传感器布置数量有限,传统针对单部件的监控策略难以得到全面的监测信息。同时由于庞大的列车保有量和保守的维修策略,监测数据具有正常运行数据量巨大、故障运行数据稀少的特点,使基于分类方法的人工智能的诊断模型难以适用。传感器数量少、故障数据少成为了目前高速列车旋转部件状态监测和故障诊断的难点。因此,对有限数目传感器信号进行分离和识别,充分利用运行数据,对转向架旋转部件进行状态监测和故障预警,可以有效提升高速列车的安全性和可持续性,具有重要的工程应用价值。
3.现有的转向架旋转部件的振动监测系统,其传感器布置方式主要针对单个部件,使用变换域方法对信号进行处理,通过设置频谱或能量谱的阈值进行识别和预警。而高速列车转向架结构紧凑,传感器接收到的往往是多个振源的复合信号,其信号成分复杂。因此导致现有系统诊断精度低、易误诊,只能对单一部件严重故障进行有效的预警。
4.盲源分离技术可在信号源及其复合方式不确定的条件下,利用信源统计独立性,从复合信号中自适应分离信源信息,有效提升检测目标信噪比。同时,基于深度学习的人工智能模型在特征识别和分类任务上展现了卓越的效果,因此在故障诊断领域有着巨大的发展潜力。然而大部分模型在训练时需要大量的、模式类别丰富的样本数据。如卷积神经网络(cnn),循环神经网络(rnn)、自动编码器(ae)等模型在有充足样本进行训练后,达到了较高的诊断精度。但在转向架旋转部件的诊断问题中大量数据模式单一,且故障样本稀少、模式不全,给模型的训练带来了巨大的挑战。目前针对少样本的故障诊断问题,提出了生成样本补充、模型精简、元学习等解决措施,但仍旧存在泛化能力弱、诊断精度不高等问题。
技术实现要素:
5.本发明所要解决的技术问题是,针对现有技术不足,提供一种多振源系统的故障诊断系统及方法,从多振源系统中分离出独立振源的振动信号,并判断该振动信是否为故障信号。
6.为解决上述技术问题,本发明所采用的技术方案是:一种多振源系统的故障诊断方法,所述多振源系统包括多个独立振源,其特征在于,所述多振源系统还包括n个数据采集装置,所述数据采集装置的采样信号长度为m,包括以下步骤:
7.a,获取分离信号数据集;搭建生成对抗神经网络模型;
8.分离信号数据集的具体实现方式包括:
9.s1,获取多振源系统的复合振动信号;
10.s2,基于所述复合振动信号获取复合信号矩阵,对所述复合信号矩阵依次进行零均值化与白化处理,获取白化处理后的复合信号矩阵;
11.s3,基于白化处理后的复合信号矩阵获取分离信号矩阵;
12.s4,将所述分离信号矩阵切分为个一维数组,输出单通道的波形.wav文件,对于每一个独立振源,制作分离信号数据集;l为含振动特征的样本长度,根据所述独立振源的转速和所述信号采集装置的采样率确定;
13.所述生成对抗神经网络模型包括生成网络g和判别网络d;
14.所述生成网络g的网络结构包括:
15.第一层为全连接dense层;
16.第二层为reshape层,且其后接有一个批标准化单元,一个leakyrelu激活单元和一个tanh激活单元;
17.第三层至第六层均为1-d转置卷积层,卷积核大小为25,步长为4,且每层后接有一个批标准化单元,一个leakyrelu激活单元和一个tanh激活单元;
18.第七层为为1-d转置卷积层,卷积核大小为25,步长为4,且接有一个批标准化单元和leakyrelu激活单元;
19.所述判别网络d的网络结构包括:
20.第一层为至第五层均为1-d卷积层,卷积核大小为25,步长为4,且每层后接一个leakyrelu激活单元和一个phaseshuffle相位重置单元;
21.第六层为reshape层;
22.第七层为全连接dense层;
23.b,对于每一个独立振源,基于所述分离信号数据集和所述生成对抗神经网络模型进行迭代训练;
24.c,对于每一个独立振源,获取振动状态判别器。
25.具体地,所述步骤b的具体实现方式包括:
26.s601,获取损失函数:
[0027][0028]
为真实样本和生成样本的线性插值,其计算公式为:
[0029][0030]
xr为真实样本信号;k为线性插值的权重,取值范围为k∈[0,1];xf为生成样本信号;pr为真实样本的概率分布;pg为生成样本的概率分布;d(xr)为以xr为输入且满足一阶lipschitz约束的判别网络函数,d(xf)为以xf为输入且满足一阶lipschitz约束的判别网络函数;为以为输入且满足一阶lipschitz约束的判别网络函数;为判别网络函数d(xr)的期望;为判别网络函数d(xf)的期望;为函数的期望。
[0031]
s602,解码样本wav文件为张量数据,裁剪长度并归一化幅值,打乱顺序后进行采样打包;
[0032]
s603,对步骤s602获取的数据进行迭代训练。
[0033]
具体地,获取所述损失函数的方法包括:
[0034]
s6011,获取wasserstein距离项w(pr,pg),计算方法为:θ为生成网络参数;
[0035]
s6012,获取惩罚项gp的计算公式为:
[0036]
wasserstein又称为推土机距离(earth-move distance,em距离),其定义为:
[0037][0038]
其中,∏(p,q)为分布p,q组合起来的所有可能的联合分布的集合,γ为服从∏(p,q)分布的γ样本,(x,y)服从联合分布γ,为以(x,y)为输入的‖x-y‖的期望值,inf{}表示集合的下确界。
[0039]
由于在计算生成样本分布pg与真实数据分布pr的是不现实的,因此将w(pr,pg)的计算方法转换为:
[0040][0041]
梯度惩罚项是为了迫使判别网络函数满足一阶lipschitz约束.
[0042]
具体地,步骤s603中,迭代训练的具体实现方式包括:
[0043]
s6031,设定收敛条件为最大迭代次数n,随机化初始化生成器网络参数θ,判别网络参数φ;
[0044]
s6032,进行次数为m的判别训网络训练:为从所述分离信号数据集中采集一批真实样本xr,输入判别网络输出d(xr;φ),再从n(0,1)分布中采样一批随机向量h,输入生成器输出xf=g(h;θ),随后计算损失函数,使用adam优化器使,设置超参数α,β1,β2,进行参数φ优化并更新,使损失函数值最大化:
[0045][0046]
s6033,进行生成器训练:采样n(0,1)分布输入生成器,计算损失函数,使用adam优化器,设置超参数α1,β1,β2,进行参数θ的优化并更新,使损失函数的值最小化:
[0047][0048]
s6034,训练迭代直至达到最大迭代次数n。
[0049]
具体地,基于步骤s1至步骤s3,对于每一个独立振源,周期性获取分离信号矩阵,输入至所述振动状态判别器,输出判别结果,当所述判别结果为负时,判别为故障,并进行报警。
[0050]
具体地,步骤s1的具体实现方式包括:步骤s1的具体实现方式包括:每个所述信号采集装置采集一个复合振动信号,组成n
×
m尺寸的复合信号矩阵x,n与m均为自然数。
[0051]
具体地,步骤s2的具体实现方式包括:
[0052]
s201,对所述复合信号矩阵按行去中心化,基于公式获取去中心化处理后的复合信号矩阵xd;ej为除第j行元素为1,其余均为零的n行列向量;xj为复合信号矩阵x的第j行数据;为复合信号矩阵第j行第i列数值;
[0053]
s202,基于公式计算协方差矩阵c;
[0054]
s203,基于公式cv=vλ进行特征分解;v=[v1,v2,
…
,vn]是特征向量按列组成的矩阵;λ=diag(ζ1,ζ2,
…
,ζn)是特征值组成的对角矩阵;
[0055]
s204,进行白化处理,基于公式获取复合信号矩阵xw。
[0056]
具体地,步骤s3的具体实现方式包括:
[0057]
s301,通过拟牛顿迭代运算,计算最优复合矩阵w;
[0058]
s302,基于公式s=w
t
·
x获取分离信号矩阵s。
[0059]
具体地,步骤s301的具体实现方式包括:
[0060]
s3011,初始化最优复合矩阵w的第i列,i的初始值为1,初始化为长度为m,向量元素和为1的随机列向量,得到迭代初始值设定迭代阈值为∈;
[0061]
s3012,进行第j次迭代运算,j的初始值为1,基于公式s3012,进行第j次迭代运算,j的初始值为1,基于公式获取第i个复合向量wi的第j次迭代值;a1=1;
[0062]
s3013,标准化迭代数值,令
[0063]
s3014,计算若认为迭代收敛,进入步骤s3015,否则返回步骤s3012;
[0064]
s3015,将向量wi保存至最优复合矩阵w的第i列,对于i 1,返回步骤s3012,当i=n时,迭代结束。
[0065]
基于同一个技术构思,本发明还提供了一种多振源系统的故障诊断系统,包括多个独立振源,振动信号采集装置和计算机设备;所述振动信号采集装置用于采集复合振动信号;所述计算机设备被配置或编程为用于执行所述多振源系统的故障诊断方法。
[0066]
与现有技术相比,本发明所具有的有益效果为:本发明针对多振源系统中的复合振动信号,使用盲源分离方法实现复合振动信号的分离,获取独立振源的振动信号,生成正常状态下分离信号数据集。使用该分离信号数据集训练对抗式生成网络,通过判别网络对的独立振源的振动信号进行辨识,判断该独立振源是否处于异常状态,从而实现无样本下故障源的定位和达到对故障的定位和异常预警功能。该方法适用性强,能够在缺少故障样本的情况下,充分利用不同独立振源的正常稳定状态工作振动信号训练模型,并在故障发生时进行及时的定位和异常预警。
附图说明
[0067]
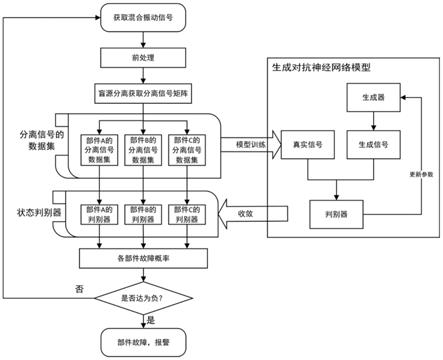
图1为本发明一实施例的一种多振源系统中无样本故障诊断方法的流程示意图。
[0068]
图2为本发明一实施例中网络模型训练流程示意图。
[0069]
图3为本发明一实施例中仿真正常运行状态下源信号的时域图。
[0070]
图4为本发明一实施例中仿真正常运行状态下源信号的频域图。
[0071]
图5为本发明一实施例中仿真正常运行状态下分离信号的时域图。
[0072]
图6为本发明一实施例中仿真正常运行状态下分离信号的频域图。
[0073]
图7为本发明一实施例中仿真故障运行状态下源信号的时域图。
[0074]
图8为本发明一实施例中仿真故障运行状态下源信号的频域图。
[0075]
图9为本发明一实施例中仿真故障运行状态下分离信号的时域图。
[0076]
图10为本发明一实施例中仿真故障运行状态下分离信号的频域图。
[0077]
图11为本发明一实施例中正常信号样本与故障信号样本的判别结果。
[0078]
其中,部件a,部件b与部件c均为多振源系统中的独立振源。
具体实施方式
[0079]
本发明一实施例的多振源系统,包括多个独立振源,所述多振源系统的故障诊断系统包括多个振动信号采集装置和计算机设备,所述振动信号采集装置为传感器,多个传感器用于采集所述多振源系统的复合振动信号,所述计算机设备被配置或编程为用于执行多振源系统的故障诊断方法,如图1所示,该方法包括以下步骤:
[0080]
s1,使用多个传感器获取多振源系统的复合振动信号;设定有n个传感器,每个所述传感器采集一个复合振动信号,一共n个复合信号,每个复合信号的长度为m,组成n
×
m尺寸的复合信号矩阵x,n与m均为自然数。
[0081]
s2,对所述复合振动信号进行前处理,以去除输入信号中的冗余信息。首先对所述复合信号矩阵x进行零均值化处理,然后使用pca算法进行白化处理,具体实现方法包括以下步骤:
[0082]
s201,按行去中心化,通过公式计算获取去中心化处理后的复合信号矩阵xd;
[0083]
其中,xj为信号矩阵x的第j行数据;
[0084]
为信号矩阵第j行第i列数值;
[0085]ej
为除第j行元素为1,其余均为零的n行列向量;
[0086]
s202,去相关:通过公式计算协方差矩阵c;其中,为矩阵xd的转置矩阵;
[0087]
s203,基于公式cv=vλ进行特征分解,得到矩阵v和矩阵λ;
[0088]
其中,v=[v1,v2,
…
,vn]是特征向量按列组成的矩阵;
[0089]
λ=diag(ζ1,ζ2,
…
,ζn)是特征值组成的对角矩阵;
[0090]
s204,根据公式得到白化处理后的复合信号矩阵xw;
[0091]
其中,v
t
为矩阵v的转置矩阵;
[0092]
s3,使用fastica算法进行信号分离:从白化处理后的复合信号矩阵xw分离出包含n个独立振源的振动信号的分离信号矩阵s,包括以下步骤:
[0093]
s301,通过拟牛顿迭代运算,计算最优复合矩阵w,计算方法为:
[0094]
s3011,初始化最优复合矩阵w第i列,i的初始值为1,初始化为长度为m,向量元素
和为1的随机列向量,得到迭代初始值设定迭代阈值为∈;
[0095]
s3012,进行第j次迭代运算,j的初始值为1,令s3012,进行第j次迭代运算,j的初始值为1,令其中a1=1;
[0096]
s3013,标准化迭代数值,令
[0097]
s3014,计算若则认为迭代收敛,进入步骤s3015,否则返回步骤s3012。
[0098]
s3015,将向量wi保存至最优复合矩阵w的第i列,对于i 1,返回步骤s3012,当i=n时,迭代结束。
[0099]
s302,基于公式s=w
t
·
x,计算得到分离信号矩阵s;
[0100]
s4,使用分离信号矩阵s制作分离信号数据集。具体实现方式包括:根据所述独立振源的转速和所述传感器的采样率,确定能够包含振动特征的样本长度l,然后将分离信号矩阵s切分为个一维数组,对于每一个独立振源,输出单通道的波形.wav文件,按照所代表的独立振源进行标记分组,以供模型训练使用。
[0101]
s5,搭建生成对抗神经网络模型:该网络模型包括生成网络g和判别网络d;
[0102]
生成网络g的输入为[batch_size,100]的随机张量,其网络结构包括:
[0103]
第一层为全连接dense层,连接单元数为16384,输出尺寸为[batch_size,16384];
[0104]
第二层为reshape层,输出尺寸为[batch_size,16,1024];且其后接有一个批标准化单元,一个leakyrelu激活单元和一个tanh激活单元;
[0105]
第三层为至第六层为1-d转置卷积层,卷积核大小为25,步长为4,输出尺寸分别为[batch_size,64,512]、[batch_size,256,256]、[batch_size,1024,128]、[batch_size,4096,64],且每层后接有一个批标准化单元,一个leakyrelu激活单元和一个tanh激活单元;
[0106]
第七层为为1-d转置卷积层,卷积核大小为25,步长为4,输出尺寸为[batch_size,16384];且其后接有一个批标准化单元和leakyrelu激活单元。
[0107]
所述判别网络d的输入为[batch_size,16384,channel_size],其网络结构包括:
[0108]
第一层为至第五层为1-d卷积层,卷积核大小为25,步长为4,输出尺寸分别为[batch_size,4096,64]、[batch_size,1024,128]、[batch_size,256,256]、[batch_size,64,512]、[batch_size,16,1024];且每层后接一个leakyrelu激活单元和一个phaseshuffle相位重置单元;
[0109]
第六层为reshape层,输出尺寸为[batch_size,16384];
[0110]
第七层为全连接dense层,输出为判别概率,尺寸为[batch_size,1]。
[0111]
s6,训练网络模型。
[0112]
如图2所示,训练过程包括编写训练函数,所述训练函数包含损失函数,数据加载、优化迭代模块。
[0113]
s601,损失函数包含wasserstein距离项和梯度惩罚项,wasserstein又称为推土
机距离(earth-move distance,em距离),其定义为:
[0114][0115]
其中,∏(p,q)为分布p,q组合起来的所有可能的联合分布的集合,γ为服从∏(p,q)分布的γ样本,(x,y)服从联合分布γ,为以(x,y)为输入的‖x-y‖的期望值,inf{}表示集合的下确界。
[0116]
由于在计算生成样本分布pg与真实数据分布pr的是不现实的,因此将w(pr,pg)的计算方法转换为:
[0117][0118]
其中,xr为真实样本信号;
[0119]
xf为生成样本信号;
[0120]
pr为真实样本的概率分布;
[0121]
pg为生成样本的概率分布;
[0122]
为以xr为输入的d(xr)的期望;
[0123]
为以xf为输入的d(xf)的期望;
[0124]
d(xf)为满足一阶lipschitz约束的判别网络函数。
[0125]
梯度惩罚项是为了迫使判别网络函数满足一阶lipschitz约束,惩罚项gp定义为:
[0126][0127]
其中,为真实样本和生成样本的线性插值,其计算公式为;
[0128][0129]
其中k为线性插值参数,其取值范围为k∈[0,1]
[0130]
得到损失函数为:
[0131][0132]
s602,数据加载,具体包括:对于每一个独立振源数据集,添加分离信号数据集的文件路径,按路径提取样本文件。解码样本.wav文件为张量数据,裁剪长度并归一化幅值。将所有数据打乱顺序,然后按一定数量进行采样打包,供迭代器使用。
[0133]
s603,,迭代训练,如图2所示,训练过程具体包括:
[0134]
s6031,设定收敛条件为最对于每一个独立振源大迭代次数n,随机化初始化生成器网络参数θ,判别网络参数φ;
[0135]
s6032,进行次数为m的判别训网络训练:为从所述分离信号数据集中采集一批真实样本xr,输入判别网络输出d(xr;φ),再从n(0,1)分布中采样一批随机向量h,输入生成器输出xf=g(h;θ),随后计算损失函数,使用adam优化器使,设置超参数α,β1,β2,进行参数φ优化并更新,使损失函数值最大化:
[0136][0137]
s6033,进行生成器训练:采样n(0,1)分布输入生成器,计算损失函数,使用adam优
化器,设置超参数α1,β1,β2,进行参数θ的优化并更新,使损失函数的值最小化:
[0138][0139]
训练迭代直至达到最大迭代次数n。
[0140]
s7,提取收敛后判别网络的参数φ,构造输入已经搭好的网络模型中,对于每一个独立振源,形成振动状态判别器。
[0141]
s8,基于步骤s1至步骤s3,对于每一个独立振源,周期性获取分离信号矩阵,输入至所述振动状态判别器,输出判别结果,当所述判别结果为负时,判别为故障,并进行报警。
[0142]
以列车转向架列为多振源系统的案例,所述车转向架包括三个独立振源,分别为轴承、电机和齿轮箱,使用三个传感器采集所述转向架的复合振动信号,使用本发明的多振源系统的故障诊断方法进行仿真,具体包括:
[0143]
电机的振动信号的主要成分有转子转速的一倍频率、二倍频率与少量高频信号,当定子线圈松动时会产生高幅值的线圈通过频率振动;齿轮箱的振动信号主要包含转速的一倍频率、二倍频率和齿轮啮合频率,当发生故障是会发生一定程度的频率调制和幅度调制现象;所述轴承的振动信号主要是其内外圈的转速倍频还有少量的零件共振高频成分,当其发生故障时会产生一定频率范围内的高频冲激信号。
[0144]
根据所述轴承、电机和齿轮箱的振动特性建立振动仿真信号,得到各部件正常状态下信号函数如下:
[0145]
x=10sin(152
×
2π
×
t) 5sin(304
×
2π
×
t) 2sin(700
×
2π
×
t) cos(800
×
2π
×
t)
[0146]
y=5sin(496
×
2π
×
t) 2sin(993
×
2π
×
t) 2cos(1440
×
2π
×
t)
[0147]
z=10sin(273
×
2π
×
t) 5sin(446
×
2π
×
t) 2sin(993
×
2π
×
t) cos(1986
×
2π
×
t)
[0148]
x为电机的正常信号函数,y为齿轮箱的正常信号函数,z为滚动轴承的正常信号函数;
[0149]
选取轴承、电机和齿轮箱的部分故障特征添加入正常信号函数中形成故障信号:
[0150]
x_fault=10sin(152
×
2π
×
t) 5sin(304
×
2π
×
t) 2sin(700
×
2π
×
t) cos(800
×
2π
×
t) 10sin(750
×
2π
×
t)
[0151]
y_fault=5sin(496
×
2π
×
t 5sin(50
×
2π
×
t)) 2sin(993
×
2π
×
t) 2cos(1440
×
2π
×
t)
[0152][0153]
x_fault为电机的故障信号函数,y_fault为齿轮箱的故障信号函数,z_fault为滚动轴承的故障信号函数;
[0154]
分别使用上述正常信号函数和故障信号函数生成六条具有8.192
×
106个采样点,采样率为16khz,共计100s的仿真数据。
[0155]
随后使用线性复合方式模拟信号的复合过程,将三个独立源信号复合成为三个复合信号,以模拟传感器的观测过程。其复合信号矩阵为:
[0156][0157]
本案例中独立振源的数量与传感器数量相同,即独立振源的数量与观测信号源数量相同,且数据本身是零均值化的,所以无需进行数据前处理,直接使用fastica算法对进行分离。
[0158]
如图3-图10所示,基于分离前后的正常信号的时域波形图与频谱图,对比源信号可以发现,特征频率在分离前后变化较小,分离效果较好。
[0159]
将分离后的三条正常信号进行归一化处理,并分别等距切分500份,得到1500条正常样本数据,分别为轴承的正常样本数据a,电机的正常样本数据b和齿轮箱的正常样本数据c。
[0160]
将分离后的三条故障信号进行归一化处理,并分别等距切分500份,得到1500条故障样本数据,分别为轴承的故障样本a_fault、电机的故障样本b_fault和齿轮箱的故障样本c_fault。
[0161]
将上述六个据按比特编码输出为.wav文件保存,采样率为16khz,比特位深为16。将正常样本数据输入搭建好的一维生成对抗神经网络模型中进行模型训练,在经过15010次循环后达到收敛。
[0162]
提取收敛模型中的判别网络对振动信号进行状态判别。输入500个轴承的正常样本数据a,其输出值的范围在[8.1,19.1];输入500个电机的正常样本数据b,其输出值的范围在[5.1,17.2];输入500个齿轮箱的正常样本数据c,其输出值的范围在[21.8,26.1];输入500个轴承的故障样本a_fault,其输出值的范围在[-34.4,-33.1];输入500个电机的故障样本b_fault,其输出值的范围在[-7.5,-2.2];输入500个齿轮箱的故障样本c_fault,其输出值的范围在[-17.3,-14.9]。
[0163]
如图11所示,将输出值归一化后的分布中,故障与正常信号有着明显的界限。因此判别网络对故障信号有着强大的分辨能力,当判别网络输出为负时,认为该部件故障,并进行预警。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。