一种基于陀螺仪的车辆前轮转向角测量装置
【技术领域】
1.本发明涉及车辆前轮转向角测量技术领域,尤其涉及一种基于陀螺仪的车辆前轮转向角测量装置。
背景技术:
2.前轮转向角的测量对于农机自动驾驶至关重要,现有的方案主要有两种。第一种是使用机械角度传感器,但机械角度传感器安装困难,且由于农机作业环境恶劣,其故障率较高;第二种是使用安装于车体的陀螺仪,结合车身速度,根据车体的运动学模型来计算前轮转向角,但由于农机作业时普遍速度较低,导致直接计算得到的转向角存在较大的噪声,给后续自动控制系统设计带来了挑战。
3.因此,有必要提出一种技术方案来克服上述问题。
技术实现要素:
4.本发明的目的之一在于提供一种基于陀螺仪的车辆前轮转向角测量装置,其安装方便、故障率低、测量噪声低。
5.根据本发明的一个方面,本发明提供一种基于陀螺仪的车辆前轮转向角测量装置,其包括:从陀螺,其安装于车辆的前轮转向机构处,其用于测量前轮转向角速度ωs;车身速度测量模块,其安装于所述车辆上,其用于测量车身速度vb;主陀螺,其安装于所述车辆的车身处,所述主陀螺用于测量车身角速度ωm,所述主陀螺与所述从陀螺和车身速度测量模块通信连接,所述主陀螺还用于接收所述从陀螺测量的前轮转向角速度ωs以及所述车身速度测量模块测量的车身速度vb,并利用卡尔曼滤波器,融合所述车身角速度ωm、前轮转向角速度ωs和车身速度vb计算得到校准后的车辆前轮转向角。
6.进一步的,所述主陀螺计算前轮相对于车身的角速度:
7.ω=ω
s-ωm#(1)
8.其中,ωs为所述前轮转向角速度ωs,ωm为所述车身角速度ωm。
9.进一步的,所述主陀螺将前轮相对于车身的角速度进行积分:
10.θ(k)=θ(k-1) ω(k)
·
dt#(2)
11.其中,k表示第k次陀螺测量,dt为相邻两次陀螺测量的时间间隔。
12.进一步的,根据车体运动学,所述主陀螺计算出初测的车身前轮转向角:
[0013][0014]
其中,l为所述车辆同侧前后轮的距离,ωm为所述车身角速度ωm,vb为所述车身速度vb。
[0015]
进一步的,所述主陀螺通过卡尔曼滤波器,结合公式(2)和公式(3),得到校准后的车辆前轮转向角,其中,公式(2)属于所述卡尔曼滤波器的时间更新部分,公式(3)属于所述卡尔曼滤波器的测量更新部分。
[0016]
进一步的,所述车身速度测量模块为车载里程计或全球导航卫星系统接收机。
[0017]
进一步的,所述主陀螺通过can总线或者第一uart接口与所述从陀螺通信连接;所述主陀螺通过can总线或者第二uart接口与所述车身速度测量模块通信连接。
[0018]
进一步的,所述主陀螺、从陀螺和车身速度测量模块与上位机通信连接;所述从陀螺与所述主陀螺通信连接。
[0019]
进一步的,所述主陀螺、从陀螺和车身速度测量模块通过can总线与所述上位机通信连接;所述从陀螺通过第一uart接口与所述主陀螺通信连接;所述主陀螺通过第二uart接口与所述上位机通信连接,所述上位机通过所述第二uart接口转发所述车身速度测量模块测量的车身速度vb给所述主陀螺。
[0020]
与现有技术相比,本发明在车体安装主陀螺仪,在前轮转向机构处安装从陀螺仪,主陀螺仪接收车身速度以及从陀螺仪测量的前轮转向角速度,利用卡尔曼滤波器,融合主陀螺仪测量的车身角速度、从陀螺仪测量的前轮角速度以及车身速度,解决机械角度传感器安装困难且故障率高以及根据车身运动学计算的前轮转向角噪声大的问题。
【附图说明】
[0021]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
[0022]
图1为本发明在一个实施例中的基于陀螺仪的车辆前轮转向角测量装置的安装示意图;
[0023]
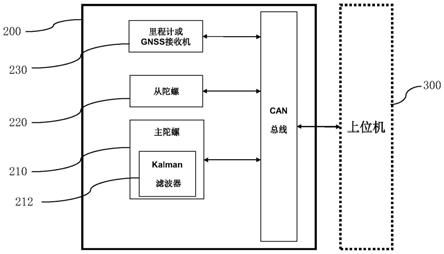
图2为本发明在一个实施例中的基于陀螺仪的车辆前轮转向角测量装置的can接口连接示意图;
[0024]
图3为本发明在一个实施例中的基于陀螺仪的车辆前轮转向角测量装置的uart接口连接示意图;
[0025]
图4为在一个实施例中本发明所示的基于陀螺仪的车辆前轮转向角测量装置的测量结果与真值和运动学计算结果的波形对比图。
【具体实施方式】
[0026]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0027]
此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。除非特别说明,本文中的连接、相连、相接的表示电性连接的词均表示直接或间接电性相连。
[0028]
请参阅图1所示,其为本发明在一个实施例中的基于陀螺仪的车辆前轮转向角测量装置的安装示意图。请参阅图2所示,其为本发明在一个实施例中的基于陀螺仪的车辆前轮转向角测量装置的can接口连接示意图;请参阅图3所示,其为本发明在一个实施例中的基于陀螺仪的车辆前轮转向角测量装置的uart接口连接示意图。图1-图3所示的基于陀螺
仪的车辆前轮转向角测量装置200包括:主陀螺210、从陀螺220和车身速度测量模块230。
[0029]
从陀螺220安装于车辆100的前轮转向机构处,其用于测量前轮转向角速度ωs。车身速度测量模块230安装于车辆100上,其用于测量车身速度vb。在一个实施例中,车身速度测量模块230为里程计或者gnss(global navigation satellite system,即全球导航卫星系统)接收机。
[0030]
主陀螺210安装于车辆100的车身处,其用于测量车身角速度ωm;所述主陀螺210与从陀螺220通信连接,且所述主陀螺210与车身速度测量模块230通信连接,所述主陀螺210还用于接收所述从陀螺220测量的前轮转向角速度ωs以及所述车身速度测量模块230测量的车身速度vb,并利用kalman(卡尔曼)滤波器212,融合所述车身角速度ωm、前轮转向角速度ωs和车身速度vb计算得到校准后的车辆前轮转向角θ。
[0031]
在图2和图3实施例中,所述主陀螺210通过can总线(controller area network)或者uart(universal asynchronous receiver/transmitter,即通用异步收发传输器)接口1与从陀螺220通信连接;所述主陀螺210通过can总线(controller area network)或者uart(universal asynchronous receiver/transmitter,即通用异步收发传输器)接口2与车身速度测量模块230通信连接。
[0032]
在图2和图3所示的具体实施例中,所述主陀螺210、从陀螺220、车身速度测量模块230与上位机300通信连接;所述从陀螺200与所述主陀螺210通信连接。其中,所述主陀螺210、从陀螺220、车身速度测量模块230通过can总线与上位机300通信连接;所述从陀螺220通过第一uart接口1与所述主陀螺210通信连接;所述主陀螺210通过第二uart接口2与所述上位机300通信连接,所述上位机300通过所述第二uart接口2转发所述车身速度测量模块230测量的车身速度vb给所述主陀螺210。
[0033]
以下具体介绍图1-图3所示的主陀螺210的工作过程。
[0034]
1、计算前轮相对于车身的角速度:
[0035]
ω=ω
s-ωm#(1)
[0036]
其中,ωs为从陀螺220测量的前轮转向角速度ωs,ωm为所述主陀螺210测量的车身角速度ωm。
[0037]
2、将前轮相对于车身的角速度进行积分:
[0038]
θ(k)=θ(k-1) ω(k)
·
dt#(2)
[0039]
其中,k表示第k次陀螺测量,dt为相邻两次陀螺测量的时间间隔。
[0040]
由于陀螺仪的测量存在零偏和噪声等误差,公式(2)中积分得到的车身角速度误差会随时间逐渐累积。需要有相应的测量对其进行修正。
[0041]
3、根据车体运动学,初测的车身前轮转向角可以通过如下公式进行计算:
[0042][0043]
其中,l为所述车辆100同侧前后轮的距离,ωm为所述主陀螺210测量的车身角速度ωm,vb为车身速度测量模块230测量的车身速度vb。
[0044]
通过公式(3)可以看出,当车辆100低速行驶(即vb很小)时,陀螺的噪声会被放大,计算得到的初测的车身前轮转向角θm噪声会很大。但该方法的优点在于计算得到的初测的车身前轮转向角的误差不会随时间增加。
[0045]
4、通过kalman滤波器212,结合公式(2)和公式(3),可以得到高带宽、低噪声和误差不随时间增加的校准后的车辆前轮转向角。其中公式(2)属于kalman滤波器212的时间更新部分,公式(3)属于kalman滤波器212的测量更新部分。
[0046]
请参考图4所示,其为在一个实施例中本发明所示的基于陀螺仪的车辆前轮转向角测量装置的测量结果与真值和运动学计算结果的波形对比图。由图4可知,本发明所示的基于陀螺仪的车辆前轮转向角测量装置的测量结果与真值相吻合,克服了运动学计算结果噪声过大的问题。
[0047]
综上所述,本发明所述的基于陀螺仪的车辆前轮转向角测量装置,其包括:从陀螺220,其安装于车辆100的前轮转向机构处,其用于测量前轮转向角速度ωs;车身速度测量模块230,其安装于所述车辆100上,其用于测量车身速度vb;主陀螺210,其安装于所述车辆100的车身处,所述主陀螺210用于测量车身角速度ωm,所述主陀螺210与所述从陀螺220和车身速度测量模块230通信连接,所述主陀螺210还用于接收所述从陀螺220测量的前轮转向角速度ωs以及所述车身速度测量模块230测量的车身速度vb,并利用卡尔曼滤波器212,融合所述车身角速度ωm、前轮转向角速度ωs和车身速度vb计算得到校准后的车辆前轮转向角。这样,本发明所述的基于陀螺仪的车辆前轮转向角测量装置可以实现:1、前轮转向角装置易于安装,且故障率低。2、前轮转向角测量带宽高、噪声低,且误差不随时间增加。
[0048]
在本发明中,“通信连接”如无特别说明,则表示直接或间接的通信连接。
[0049]
以上所述仅为本发明的较佳实施方式,本发明的保护范围并不以上述实施方式为限,但凡本领域普通技术人员根据本发明揭示内容所作的等效修饰或变化,皆应纳入权利要求书中记载的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
