雷达系统及组件
1.相关申请的交叉引用
2.本pct国际专利申请要求2019年7月2日提交的美国临时申请no.62/869,775的权益和2020年3月5日提交的美国临时申请no.62/985,584的权益。以上申请的全部公开内容被视为本技术的公开内容的一部分并通过参引并入本文中。
技术领域
3.本公开总体上涉及用于机动车辆的雷达传感器,并且更具体地涉及配置成围绕车辆周界突出的雷达壳体和天线。
背景技术:
4.该部分提供了涉及本公开的背景信息,该背景信息不一定是现有技术。
5.在诸如小型货车、运动型多用途车辆等的机动车辆中,提供带有较大后开口的车身已变为普遍做法。提升门(也称为尾门或闭合面板)通常用铰链安装至车身或底盘以围绕横向延伸的轴线在打开位置与关闭位置之间进行枢转运动。通常,提升门可以被手动地操作或使用包括可逆电动马达的动力驱动机构操作。
6.存在用于在打开车辆的提升门时提供协助或为自动地打开车辆的提升门提供协助的系统。这些系统利用手动致动的遥控器,并且通常需要用户或操作者的至少一只手可用。这在用户正承担着将要经由提升门被安置于车辆中的负载的情况下可能有问题。另外,存在使用安装在车辆的后缓冲器之下的传感器的系统,通过用户在缓冲器之下挥动其脚可以激活传感器来打开提升门。然而,这些系统可能是复杂的,特别是在试图避免无意操作时。
7.鉴于上述情况,仍然需要开发一种传感器,该传感器能够准确地检测围绕车辆周界的预定区域内的对象,同时防止由存在预定区域之外的对象造成的误触发。
技术实现要素:
8.本部分提供了本公开的总体概述,并不是对其全部范围或其所有特征、方面和目标的全面公开。
9.本公开的一方面在于提供一种用于机动车辆的传感器,该传感器包括雷达壳体和设置在雷达壳体内的天线,并且该天线配置成通过视场(fov)投射射频(rf)能量以检测机动车辆的占用区域内的对象或姿势。天线被配置成防止fov延伸到机动车辆的占用区域之外也是一方面。
10.本公开的一方面还在于提供一种传感器,其中,fov由天线的设计控制。具体地,本公开的一方面在于提供转向天线以控制fov。
11.在本公开的另一方面中,传感器可以包括支架,该支架配置成对雷达壳体进行保持和定位以用于控制视场。
12.在本公开的另一方面中,支架可调节。
13.在本公开的另一方面中,支架不可调节。
14.在本公开的另一方面中,天线以倾斜角度设置在壳体内以控制视场。
15.在本公开的另一方面中,天线包括配置成控制视场的天线元件阵列。
16.在本公开的另一方面中,天线元件布置为线性阵列以提供基本上沿着主轴线延伸的视场。
17.在本公开的另一方面中,天线元件由大体平坦的平面中的矩形传导性区域形成,并且由规则的间距彼此间隔开。
18.在本公开的另一方面中,天线元件的线性阵列限定了4
×
1模式。
19.在本公开的另一方面中,天线配置成使产生的辐射样式转向以控制视场。
20.在本公开的另一方面中,天线是发射天线,并且其中,传感器还包括配置成接收射频辐射的接收天线。
21.在本公开的另一方面中,发射天线和接收天线各自具有相同的配置。
22.在本公开的另一方面中,视场配置成沿着机动车辆的缓冲器的长度延伸。
23.在本公开的另一方面中,雷达壳体设置成邻近机动车辆的缓冲器的内表面。
24.在本公开的另一方面中,传感器还包括位于雷达壳体与缓冲器的内表面之间的密封件,其中,该密封件构造成防止碎屑进入天线与缓冲器之间。
25.在本公开的另一方面中,雷达壳体包括液体不可渗透且可透气的通风过滤器。
26.在本公开的另一方面中,通风过滤器包括戈尔特斯(gore-tex)材料。
27.在本公开的另一方面中,天线元件基本上沿着垂直于车辆的外周界设置的主轴线延伸。
28.在本公开的另一方面中,雷达壳体设置成邻近机动车辆的车辆部件的内表面并齐平地抵靠该内表面。
29.在本公开的另一方面中,雷达壳体设置成邻近机动车辆的车辆部件的内表面并齐平地抵靠该内表面,使壳体与该内表面之间没有间隙。
30.本公开的一方面还在于提供一种传感器,该传感器配置成防止碎屑或湿气侵入传感器的壳体与机动车辆的缓冲器的内表面之间。具体地,一方面在于抵靠缓冲器的内表面对壳体进行密封以防止碎屑的侵入。
31.本公开的一方面还在于:提供一种操作用于机动车辆的雷达传感器以感测机动车辆旁边的姿势和对象中的至少一者的方法。该方法包括将雷达壳体安装在机动车辆上的步骤。雷达壳体具有设置在雷达壳体内的天线。该方法的下一步骤是将天线配置成通过视场投射射频能量,从而检测机动车辆的占用区域内的对象或姿势。天线配置成防止视场延伸到机动车辆的占用区域之外。
32.本公开的另一目的在于提供一种用于机动车辆的闭合面板的传感器,该传感器用于对闭合面板附近的对象和运动中的至少一者进行感测以促进闭合面板的操作。该传感器包括雷达壳体和设置在壳体中的雷达天线。天线配置成对闭合面板附近的对象和运动中的至少一者进行感测,并且配置成输出与对象和运动中的至少一者相对应的数据。雷达吸收器以可操作的方式附接至雷达壳体。雷达吸收器配置成使从雷达发射传感器发出的雷达波束成形。
附图说明
33.本公开的这些方面、特征和优点和其他方面、特征和优点将是容易理解的,因为通过在结合附图考虑时参照以下详细描述可以更好地理解本公开的这些方面、特征和优点和其他方面、特征和优点,在附图中:
34.图1a是配备有用于打开车辆的后提升门的用户激活的非接触式动力闭合构件系统的示例机动车辆的立体图,其示出了根据本公开的一些方面的至少一个传感器的位置;
35.图1b是图1a的示例机动车辆的缓冲器的立体分解图;
36.图2a是根据本公开的各方面的缓冲器内的第一示例传感器的立体前视图;
37.图2b是根据本公开的各方面的图2a的缓冲器内的第一示例传感器的立体侧视图;
38.图3是根据本公开的各方面的第一示例传感器和安装支架的分解图;
39.图4是根据本公开的各方面的第二示例传感器的立体图;
40.图5是根据本公开的各方面的第三示例传感器的分解图;
41.图6是根据本公开的各方面的第四示例传感器的分解图;
42.图7是根据本公开的各方面的图6的第四示例传感器的立体图;
43.图8是根据本公开的各方面的图6的第四示例传感器的横截面图;
44.图9是根据本公开的各方面的图6的第四示例传感器的壳体的立体图;
45.图10是根据本公开的各方面的图6的第四示例传感器的覆盖件的立体图;
46.图11是根据本公开的各方面的图6的第四示例传感器的隔离器的立体图;
47.图12是根据本公开的各方面的图6的第四示例传感器的通风过滤器的立体图;
48.图13是根据本公开的各方面的图6的第四示例传感器的印刷电路板的立体图;
49.图14是机动车辆的缓冲器的示意性仰视图,其示出了根据本公开的各方面的两个传感器的视场;
50.图15是机动车辆的缓冲器的示意性侧视图,其示出了根据本公开的各方面的传感器的视场;
51.图16是机动车辆的缓冲器的示意性后视图,其示出了根据本公开的各方面的传感器的视场;
52.图17是机动车辆的缓冲器的立体剖视图,其示出了根据本公开的各方面的第五示例传感器的视场;
53.图18a是机动车辆的缓冲器的示意性侧视图,其示出了根据本公开的各方面的传感器的视场;
54.图18b是机动车辆的缓冲器的示意性侧视图,其示出了根据本公开的各方面的相对于图18a向内倾斜的传感器的视场;
55.图18c是机动车辆的缓冲器的示意性侧视图,其示出了根据本公开的各方面的相对于图18a向外倾斜的传感器的视场;
56.图19a是根据本公开的各方面的安装在内饰件内的第六示例传感器的传感器壳体的剖视立体图;
57.图19b是根据本公开的各方面的安装在图19a的内饰件内的传感器壳体的内部立体图;
58.图20是根据本公开的各方面的传感器控制器的框图;
59.图21是根据本公开的各方面的传感器控制器的视图;
60.图21a是根据说明性实施方式的图21的天线的放大图;
61.图21b是根据说明性实施方式的示出了以db为单位的幅度的s参数图;
62.图22是示出了根据本公开的各方面的位于雷达姿势系统内的部件与机动车辆中的其他装置之间的功能性连接的示意性框图;
63.图23是图示了根据本公开的各方面的用于机动车辆的闭合件的免手动操作系统内的主要部件的示意性框图;
64.图24a是根据本公开的各方面的传感器控制器的仰视图;
65.图24b是根据本公开的各方面的图24a的传感器控制器的俯视图;
66.图25a是图25a的印刷电路板的立体图及由此生成的辐射样式的图形表示;
67.图25b是由图25a的发射天线生成的辐射样式的图形视图;
68.图25c是图25a的发射天线的示意性俯视图;
69.图25d和图25e是根据本公开的各方面的4
×
1发射天线设计的远场增益图;
70.图25f和图25g是根据本公开的各方面的5
×
1发射天线设计的远场增益图;
71.图26a是根据本公开的各方面的转向贴片天线的示意性俯视图;
72.图26b是由图26a的转向贴片天线生成的辐射样式的图形视图;
73.图27a是根据本公开的各方面的包括发射天线和接收天线的印刷电路板的立体图;
74.图27b是由图26a的发射天线生成的辐射样式的图形视图;
75.图28是机动车辆的缓冲器的示意性俯视图,其示出了根据本公开的各方面的传感器的视场;
76.图29a是机动车辆的缓冲器的示意性侧视图,其示出了根据本公开的各方面的具有转向天线的传感器的视场;
77.图29b是机动车辆的缓冲器的示意性侧视图,其示出了从本公开的位置偏移的图29a的传感器的视场;
78.图30是根据本公开的各方面的机动车辆的缓冲器内的传感器的剖视侧视图;
79.图30a是根据本公开的各方面的在机动车辆的缓冲器之间具有不规则空气间隙的传感器的剖视侧视图;
80.图31是根据本公开的各方面的机动车辆的缓冲器内的传感器的剖视侧视图;
81.图32图示了根据本公开的各方面操作用于机动车辆的雷达传感器以感测机动车辆旁边的姿势和对象中的至少一者的方法的步骤;
82.图33a是根据本公开的各方面的具有用于使用碳化硅吸收进行波束形成的第一示例性雷达吸收器的雷达传感器的横截面图;
83.图33b是根据本公开的各方面的具有第一示例性雷达吸收器的雷达传感器的仰视图;
84.图34a是根据本公开的各方面的具有用于使用碳化硅吸收进行波束形成的第二示例性雷达吸收器的雷达传感器的横截面图;
85.图34b是具有根据本公开的各方面的第二示例性雷达吸收器的雷达传感器的仰视图;
86.图35是示出根据本公开的各方面的雷达吸收器的测试计划的表格;
87.图36a至图36d图示了根据本公开的各方面的测试计划中使用的模具;
88.图37图示了根据本公开的各方面的雷达吸收器的厚度;
89.图38a至图38c图示了根据本公开的各方面的雷达吸收器的孔口形状可选方案和孔口尺寸可选方案;
90.图39示出了根据本公开的各方面评估的使用限制;
91.图40a至图40d示出了根据本公开的各方面的壳体、模具和雷达的布置;以及
92.图41a至图41b、图42a至图42e、图43、图44、图45以及图46a至图46b示出了根据本公开的各方面的评估结果。
具体实施方式
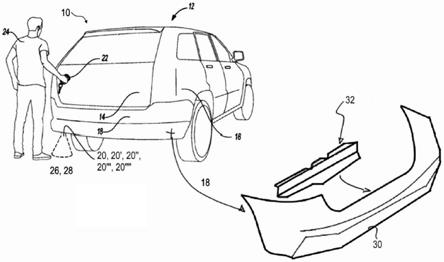
93.总体上,现在将公开根据本公开的教导构建的传感器和使用此类传感器的系统的若干示例实施方式。提供示例实施方式中的每个示例实施方式以使得本公开将是透彻的,并且将向本领域技术人员充分地传达范围。阐述了许多特定细节,例如特定部件、装置和方法的示例,以提供对本公开的实施方式的透彻理解。对于本领域技术人员而言将明显的是,不需要采用特定细节,示例实施方式可以以许多不同的形式来实施并且不应当被解释为限制本公开的范围。在一些示例实施方式中,详细描述了公知的过程、公知的装置结构以及公知的技术。
94.首先参照图1a,示例机动车辆12被示出为包括闭合构件或者闭合件,该闭合构件或者闭合件是安装至车身16的后提升门14。根据本公开中描述的示例实施方式,非接触式对象和/或姿势检测系统10集成到车身16的后缓冲器18中,并且用于控制后提升门14的运动。然而,非接触式对象和/或姿势检测系统10例如可以被安置于另一位置处,并且用于后提升门14或用于不同的闭合构件。
95.非接触式对象和/或姿势检测系统10包括至少一个传感器20、20'、20”、20”'、20
””
、20
””
',当与特定车辆12相关联的遥控钥匙(key fob)22位于车辆12的预定距离内时,例如当接近车辆12的用户24持有遥控钥匙22时,该至少一个传感器感测对象或运动。尽管在示例实施方式中使用了遥控钥匙22,但也可以使用与特定车辆12相关联并且可以由车辆12检测到的其他部件,或者可以在不使用遥控钥匙22的情况下以其他方式初始化系统10。由至少一个传感器20、20'、20”、20”'、20
””
、20
””
'检测到的对象的示例是用户24的脚150(图18a至图18c),而由至少一个传感器20、20'、20”、20”'、20
””
、20
””
'检测到的运动的示例是用户24的踢腿或挥动运动。应当理解的是,可以替代性地利用其他对象和/或运动。
96.传感器20、20'、20”、20”'、20
””
、20
””
'配置成对缓冲器18下面的视场(fov)28内的对象或运动进行检测。在一些实施方式中,传感器20、20'、20”、20”'、20
””
、20
””
'发射射频(rf)辐射26以用于感测视场fov28内的对象或运动。可以通过控制由传感器生成的辐射波束的形状或样式来限定视场28,其方式将在下文中更详细地描述。作为示例而非限制,辐射26的频率可以在23.5ghz与24ghz之间的带宽范围内,或者可以在76ghz至77ghz的频率范围内。
97.应当理解的是,后缓冲器18仅仅是本公开中提供的可以应用于包括车辆应用和非车辆应用的各种应用的传感器20、20'、20”、20”'、20
””
、20
””
'和/或系统10的示例应用。在
车辆应用中,主题传感器20、20'、20”、20”'、20
””
、20
””
'和/或系统10可以用于包括乘客门或者货物门和/或窗户的各种不同的闭合构件。替代性地或另外地,主题传感器20、20'、20”、20”'、20
””
、20
””
'和系统10可以用于与闭合构件不相关的应用,例如,用于喷泉式饮水机或洗手池的非接触式控制。
98.图1b示出了包括外饰板30的缓冲器18的细节,该外饰板在正常使用中对用户24可见,包括外饰板30的缓冲器18可以被简称为“缓冲器”。图1b还示出了设置在外饰板30内的内饰32。内饰32可以包括缓冲器18的面向地面的下表面。
99.图2a和图2b示出了根据本公开的各方面的缓冲器18内的第一示例传感器20的示例传感器壳体36。具体地,图2a和图2b示出了安装支架38,安装支架38将传感器壳体36安装至缓冲器18的内饰32,并且安装支架38提供了传感器壳体36在如箭头fa所示的前/后(即,纵向)方向上的调节。这种调节可以允许精确控制fov 28。传感器壳体36也可以称为雷达罩,特别是在传感器20、20'、20”、20”'、20
””
、20
””
'使用rf或雷达感测的实施方式中。
100.图3是根据本公开的各方面的第一示例传感器20和安装支架38的分解图。具体地,安装支架38包括大体水平延伸的顶板39,其中两个加强肋40沿着该顶板39彼此间隔开且平行地延伸。一对腿部41从顶板39向外且向下延伸。腿部41中的每个腿部限定脚部42,脚部42从其与顶板39相对的端部向外延伸。脚部42可以各自限定用于接纳紧固件以将安装支架38固定至缓冲器18的安装孔。安装支架38还包括由多个三角形角撑44支承的直立板43。直立板43也限定了用于接纳紧固件以将安装支架38固定至缓冲器18的安装孔。
101.从顶部看,第一示例传感器20包括(例如,作为传感器壳体36的一部分):一组安装螺母44(例如,两个m6螺母),其可以由金属或塑料或尼龙制成;安装支架38,一组四个盖用螺钉45(例如,四个m3螺钉);覆盖件46,该覆盖件可以包括用于防止湿气或其他污染物进入第一示例传感器20的密封件或垫圈。第一示例传感器20还包括印刷电路板(pcb)47,该印刷电路板也可以被称为电子控制单元(ecu);布线密封件48、49(例如,用于四根导线的密封件48和用于三根导线的密封件49),用于密封布线连接,防止湿气或其他污染物进入第一示例传感器20;一组两个安装螺钉50(例如,两个m6螺钉),安装螺钉50可以由金属、塑料或尼龙制成,用于旋拧入到安装螺母44中并且因此将第一示例传感器20保持至安装支架38。第一示例传感器20还包括壳体51,该壳体具有带敞开顶部的矩形箱形状;以及一组盖用螺母52(例如,四个m3螺母),这些螺母构造成以螺纹方式接纳盖用螺钉45中的相应盖用螺钉以用于将覆盖件46固定在壳体51上。还包括七根22号(即,awg 22)导线,但在图3中未示出。
102.在一些实施方式中,例如图3中所示出的,支架38能够被调节以用于控制传感器壳体36的位置和/或角度,并且因此控制fov 28的位置和/或方向。替代性地,在一些实施方式中,支架38可能是不可调节的。
103.图4是根据本公开的各方面的第二示例传感器20'的立体图。具体地,第二示例传感器20'在结构上与以上讨论的第一示例传感器20类似。然而,第二示例传感器20'包括覆盖件72,该覆盖件构造成封围并密封壳体70,其中与覆盖件72一体地形成的多个闭合片73用于接合壳体70中的相应突出部。电连接器74,例如插入式连接器,从壳体70的侧部延伸。
104.图5是根据本公开的各方面的第三示例传感器20”的分解图。第三示例传感器20”包括具有带敞开顶部的矩形箱形状的壳体70。覆盖件72构造成封围并密封壳体70的敞开顶部。壳体70限定了三个不同的安装凸缘76,安装凸缘76从壳体70向外延伸以用于接纳诸如
安装螺栓78的紧固件,从而将第三示例传感器20”安装至缓冲器18。第三示例传感器20”还包括延伸穿过壳体70的电连接器74。印刷电路板84布置在壳体70内。
105.图6至图13示出了根据本公开的各方面的第四示例传感器20”'的各个方面和部件。具体地,第四示例传感器20”'包括限定电连接器74的覆盖件72,并且覆盖件72封围了箱形壳体70的敞开边缘。在一些实施方式中,覆盖件72焊接至壳体70。覆盖件72焊接至壳体70,并且可以使用其他方式——包括一个或更多个垫圈、粘合剂、紧固件、带等——密封地封闭壳体。壳体70包括用于将第四示例传感器20”'安装至缓冲器18的两个安装凸缘76。印刷电路板84布置在壳体70内。通风过滤器92设置在壳体70内,该通风过滤器与覆盖件72中的一组通风孔94相邻并且抵靠该组通风孔94进行密封。通风过滤器92可以由液体、例如水不可渗透的材料制成,但该材料是透气的,允许空气通过。因此,通风过滤器92可以允许气流冷却内部部件、例如壳体70内的pcb 84和/或电气部件。通风过滤器92可以由编织或非编织织物、例如戈尔特斯(gore-tex)或特卫强(tyvek)制成。第四示例传感器20”'还包括四个隔离器96,隔离器96可以由弹性材料、例如橡胶或泡沫形成。隔离器96可以设置在pcb 84与壳体70之间和/或pcb 84与覆盖件72之间,以缓冲pcb 84并提供隔振和/或减震。
106.图14是机动车辆的缓冲器18的示意性仰视图,其示出了根据本公开的各方面的两个传感器20、20'、20”、20”'、20
””
、20
””
'的视场(fov)28。具体地,图14示出了传感器20、20'、20”、20”'、20
””
、20
””
'安装至缓冲器18的外饰板30内的内饰32。图14还示出了fov 28中的每个fov能够调节以限定移位的fov 28'。例如,通过调节传感器20、20'、20”、20”'、20
””
、20
””
'的位置和/或倾斜度,例如,通过调节相应传感器壳体36在如图2a至图2b中所示的其支架38上的位置,可以产生这些移位的fov 28'。
107.图15是机动车辆12的缓冲器18的示意性侧视图,其示出了根据本公开的各方面的传感器20、20'、20”、20”'、20
””
、20
””
'的视场28。投射的射频能量26被说明性地投射为波束,在所示出的波束投射在车辆缓冲器周围的配置中,并且当从车辆12的后部观察时,该波束具有在车辆横向(cc)方向(参见图16)上宽而在前/后(f/a)方向(参见图14)上窄的样式,或者通常波束将具有平行于车辆12的侧部延伸的较宽样式(作为示例参见图17和图28)。具体地,图15示出了被包含在车辆12的占用区域142内并且没有向外突出超过车辆12的占用区域142的视场28。术语“车辆的占用区域”在本文中用来指由向下投射到车辆下方的地面上的车辆外部范围的四个拐角限定的区域,这可以是车辆正下方的区域,并且在不限制出于本文讨论的目的的占用区域的情况下可以包括超出该区域的一些变型。在一种可能的配置中,视场28可以生成为不延伸超出这样的区域或稍微延伸超出这样的区域,这考虑到了任何无意的姿势或对象——例如走过车辆12旁的行人的脚,这可能是在人于狭窄的停车场中试图在车辆之间穿行的情况下,或者购物车被推动经过车辆的情况下——可能通常不会如此足够紧密地靠近车辆以至于进入车辆的占用区域中,也不会接近车辆12以使得这种姿势或对象位于车辆12下方,在传感器20、20'、20”、20”'、20
””
、20
””
'的一种可能的配置中,视场28可能被限制于车辆12下方。在另一可能的配置中,视场28可以稍微延伸超出占用区域。视场28也可以配置成不完全在车辆12下方延伸。与作为示例的已知的障碍物检测传感器(非姿势感测检测器)和adas传感器相比,视场28可以大体向下指向地面,并且完全地或部分地位于车辆12下方。因此,这样的布置可以限定车辆12下方的感测区域144和车辆12的占用区域142之外的非感测区域146。换言之,fov 28可以调节成使得其不突出超过缓冲器
18的外周边缘147。因此,可以使可能由传感器20、20'、20”、20”'、20
””
、20
””
'检测车辆12附近的对象或运动而导致的误触发或假触发最小化或被防止。
108.图16是机动车辆12的缓冲器18的示意性后视图,其示出了根据本公开的各方面的传感器20、20'、20”、20”'、20
””
、20
””
'的视场28。具体地,图16图示了延伸了宽度w1的视场28,该宽度是后轮140之间的距离的大部分。图16图示出很宽的视场28可能是有利的,因为这些视场可以使总覆盖区域最小化。在一些实施方式中,如图16中所示,单个传感器20、20'、20”、20”'、20
””
、20
””
'可能足以提供足够宽以供使用的视场28。由于围绕车辆周界形成图案的宽视场,可以设置单个传感器20、20'、20”、20”'、20
””
、20
””
',而无需位于车辆12的外部的任何识别标记或指示器以用信号通知用户为了使传感器能够检测到由脚(或身体部分)所做的姿势要将他们的脚(身体部分)放在哪里。例如,可以设置如图16中所示的宽视场28a,使得对象或障碍物、例如脚在放置在关于缓冲器18的左手侧或右手侧时都可以由如图16中所示定位的单个传感器20、20'、20”、20”'、20
””
、20
””
'检测到。在其他实施方式中,可以使用两个或更多个传感器20、20'、20”、20”'、20
””
、20
””
'以提供较宽的视场28和/或提供冗余的覆盖。
109.图17是机动车辆12的缓冲器18的立体剖视图,其示出了根据本公开的各方面的第五示例传感器20
””
的视场28。具体地,图17示出了安装支架38可以调节以控制视场28相对于缓冲器18的位置和方向。这种调节可以用于防止视场28向外延伸超出缓冲器18的占用区域142或者使视场28向外延伸超出缓冲器18的占用区域142的量最小化。
110.图18a至图18c各自示出了机动车辆12的缓冲器18的示意性侧视图,其示出了根据本公开的各方面的传感器20、20'、20”、20”'、20
””
、20
””
'的视场28。具体地,图18a示出了直接向下指向的传感器20、20'、20”、20”'、20
””
、20
””
';图18b示出了远离缓冲器18的占用区域142的边缘向内倾斜的传感器20、20'、20”、20”'、20
””
、20
””
';而图18c示出了朝向缓冲器18的占用区域142的边缘向外倾斜的传感器20、20'、20”、20”'、20
””
、20
””
'。换言之,图18a至图18c示出了传感器20、20'、20”、20”'、20
””
、20
””
'可以被物理地倾斜以改变fov 28的位置。fov 28从车辆向下指向,例如朝向地面。图18a至图18c还示出了用户24的脚150位于fov 28内部和外部的不同位置,以说明脚150可以由传感器20、20'、20”、20”'、20
””
、20
””
'检测到的地方。替代性地或另外地,fov 28可以通过其他手段进行调节,例如通过对rf辐射进行电子转向和/或通过使用不同的天线布局。这种调节fov 28的其他手段可以允许传感器20、20'、20”、20”'、20
””
、20
””
'使用固定的支架38安装至缓冲器18。
111.图19a至图19b示出了根据本公开的各方面并根据说明性示例安装在内饰件32内的第六示例传感器20
””
'的传感器壳体36。具体地,图19a示出了传感器壳体36延伸通过内饰32中的孔口154。传感器壳体36可以安装在缓冲器18或其他车辆部件内。因此,雷达传感器20
””
'可以获得指向位于缓冲器18下方的任何对象的直接视线,而不必穿透内饰32和/或任何介于中间的表面,和/或可能积聚在其上的任何碎屑和/或污物。
112.图19a至图19b还示出了传感器壳体36包括保持图标投影仪162的投影仪安装件160,该图标投影仪162生成投影图像164,例如在地面上或在由传感器20、20'、20”、20”'、20
””
、20
””
'感测到的对象上的图标。因此,图标投影仪162可以用于向用户24提供反馈。例如,特定的图标和/或颜色可以表示他们的运动或姿势已经被成功登记。不同的图标和/或颜色可以表示运动或姿势被感测到,但是存在其他问题,例如未检测到遥控钥匙22阻止了
所要求的动作。
113.图20是根据本公开的各方面的传感器控制器200的框图。示例传感器控制器200包括印刷电路板84,印刷电路板84上设置有处理器202。处理器202也可以被称为微控制器单元(mcu)。处理器202可以包括:例如,一个或更多个微处理器、微控制器、片上系统(soc);专用集成电路(asic)和/或现场可编程门阵列(fpga)。传感器控制器200还包括:电源204,电源204用于提供经调节的电压和/或电流;以及通信单元206,通信单元206用于与外部装置或电路进行交互。通信单元206可以与处理器202分开,或者可以与处理器202成一体。通信单元206可以经由一个或更多个网络标准进行通信,例如,本地互连网络(lin)、控制器区域网络(can)、以太网、或其他有线或无线协议或标准。另外地或替代性地,通信单元206可以提供数字输入和/或输出(数字io),用于经由电力及通信线路207向外部装置用信号通知各种条件或消息。传感器控制器200还包括雷达收发器208,该雷达收发器配置成经由与其连接的发射天线210和接收天线212(在本文中也使用术语“天线”来提及)来发射和接收雷达。在一种可能的配置中,控制器200配置成用于操作天线210、212以投射/接收具有23.5ghz与24ghz之间的带宽范围的射频能量。本文中也设想了其他带宽,例如76ghz至77ghz的范围。在一种说明性配置中,雷达收发器208配置成用于仅发射连续波(cw)多普勒雷达信号,并且传感器控制器200配置成用于使用多普勒雷达技术确定运动,例如基于所发射和所接收的雷达信号提取速度和幅度信息以确定姿势,例如像题为“radar detection system for non-contact human activation of powered closure member(用于对动力闭合构件的非接触式人为激活的雷达检测系统)”的美国专利申请no.us20190162010中公开的那样,该美国专利申请的全部内容通过参引并入本文中。其他传感器配置——例如fmcw、飞行时间——也是可能的。
114.参照图20、图21和图21a,控制器200被示意性地示出为经由耦合器或电路201、203耦接至天线210、212。这样的耦合器201、203可以是调谐耦合器。此外,控制器200被示出为对于耦接至每个天线耦合器201、203的天线210、212中的每个天线仅包括单个端口209tx、209rx。此外,耦合器201tx被示出为包括具有两个发射臂207a、207b的延迟电路,其中,发射臂207a、207b中的一个发射臂使由控制器200生成、在单个输出端口209tx处被接收的信号延迟到达天线,以提供基于硬件的波束转向配置,相比之下,更复杂且昂贵的电子扫描阵列配置需要配备有多输出、多输入(mimo)配置和昂贵的控制器软件或编程的控制器以用于对雷达波束进行电子转向。针对50ω输入和输出端口进行调谐的siw(衬底集成波导)199滤波器被示出为耦接在耦合器201tx与天线210之间。如图25a和图25b中所示,天线电路可以使用调谐耦合器201、203而被调谐,例如用于使波束样式中的旁瓣344s和后瓣344b最小化,尽管主瓣344m检测视场驻留在车辆的占用区域142内,但旁瓣344s和后瓣344b可能延伸超出车辆的占用区域并导致错误激活。例如,天线调谐过程可以包括:创建匹配网络以将控制器端口209的阻抗匹配到50ω;调节谐波滤波器使得在48ghz(二次谐波)处实现衰减;验证功率组合器(发射侧);对两个发射臂207a、207b进行长度匹配使得一个臂由于控制器200的结构而在相位上延迟180
°
;以及验证天线在24ghz至24.25ghz被适当地调谐。这些部件可以被单独调谐,然后对所有部件进行整体调谐。发射/接收天线的结果s11在图21b中示出。3db波束宽度为~20
°
(phi=90
°
)和~75
°
(phi=0
°
)。为了使在感兴趣的频带(24ghz至24.25ghz)处返回的最大功率处于根据返回的iq(同相且正交的信号)信号计算出的~3.5db的功率。
通过在24ghz至24.25ghz的期望频带处进行天线调谐和匹配完成天线调谐。
115.图21是根据本公开的各方面的传感器控制器200的立体图;在一些实施方式中,并且如图21中所示,传感器控制器200形成在一个印刷电路板(pcb)84上,然而,传感器控制器200可以包括两个或更多个印刷电路板84或其他装置或控制器。例如,传感器控制器200的一些功能可以分布在两个或更多个不同的处理器或控制器之间。图21的pcb 84包括处理器202、雷达收发器208以及发射天线210和接收天线212。
116.图22是示出了根据本公开的各方面的位于非接触式对象和/或姿势检测系统10内的部件与机动车辆12中的其他装置之间的功能性连接的示意性框图,该非接触式对象和/或姿势检测系统也可以被称为“雷达姿势系统”或简单地简称为系统10。具体地,图22示出了非接触式对象和/或姿势检测系统10包括功能性地连接至发射天线210和接收天线212的传感器控制器200,以及向用户24提供关于系统10的状态和/或操作的反馈的发声器装置216。发声器装置216可以包括:一个或更多个音频装置,例如扬声器、蜂鸣器、钟;和/或视觉装置,例如发光二极管(led)、显示屏幕、警告灯和/或上面参照图19a至图19b讨论的图标投影仪162。系统10还包括系统主开关218,系统主开关218可以包括断路器或熔断器等,用于经由一个或更多个电力导体222控制来自车辆12的电力总线220的电力供应。
117.同样如图22中所示,传感器控制器200可以经由一个或更多个有线通信线路228通信地耦接至动力提升门(plg)系统224,该有线通信线路可以包括数字信号或模拟信号。在一些实施方式中,并且如图22中所示,传感器控制器200可以经由plg开关226通信地耦接至动力提升门系统224,该plg开关整合来自其他源——例如手动操作的开关——的信号,以控制提升门14的操作或移动。同样如图22中所示,plg系统224还经由一个或更多个有线通信线路228通信地耦接至被动免钥匙门禁(pke)控制器230。pke控制器230经由无线通信链路232对遥控钥匙22的检测做出响应。
118.在一个示例应用中,姿势系统10可以检测到用户24要求打开提升门14的姿势。作为响应,plg系统224可以致动提升门14打开,但是只是在提升门14处于解锁状态的情况下或者在pke控制器230验证了遥控钥匙22存在于预定区域、例如提升门14附近的情况下发生。
119.图23是图示了根据本公开的各方面的用于机动车辆12的闭合件的免手动操作系统300内的主要部件的示意性框图。具体地,免手动操作系统300包括被动免钥匙门禁(pke)控制器230,其可以是与前部天线310和后部天线314通信的组合式被动门禁/被动启动(peps)及遥控免钥匙门禁(rke)系统230,并且耦接至总体或车身控制模块(“bcm”)361。每个天线310、314可以具有相关联的认证范围312、315,在该范围内可以对遥控钥匙22进行认证。bcm 361耦接至提升门控制器316,该提升门控制器对提升门14的驱动机构320和闩锁322进行控制。传感器电子控制单元(“ecu”)或传感器控制器200对一个或更多个传感器20、20'、20”、20”'、20
””
、20
””
'进行监测并且与提升门控制器316进行通信。
120.在操作中,传感器20、20'、20”、20”'、20
””
、20
””
'在其相关联的视场28内对预定对象或预定姿势进行检测。如果pke控制器230验证了遥控钥匙22处于相关联的认证范围312、315内,则提升门控制器316然后通过对驱动机构320和/或闩锁322进行激活而使提升门14被解锁和/或被致动以打开和/或关闭。
121.图24a至图24b示出了根据本公开的各方面的传感器控制器200。具体地,示例传感
器控制器200包括带有处理器202、雷达收发器208、发射天线210和接收天线212的印刷电路板84。更详细地说,发射天线210配置成发射rf辐射,并且接收天线212配置成接收rf辐射。
122.返回参照图21,示出了根据本公开的各方面的包括发射天线210和接收天线212的印刷电路板84的仰视图。在一些实施方式中,发射天线210和接收天线212各自具有相同或类似的配置和/或结构。替代性地,发射天线210和接收天线212可以在配置上彼此不同。在一些实施方式中,例如图21中所示的示例,天线210、212中的每个天线包括多个天线元件334,这些天线元件也可以被称为“贴片”,其形成为印刷电路板84上的传导性区域。天线元件334由大体平坦的平面内的矩形传导性区域形成,例如印刷电路板84的一个或更多个层。在一些实施方式中,天线元件334以直线布置为线性阵列。具体地,图21示出了示例实施方式,其中,天线210、212中的每个天线包括四个平坦且矩形的天线元件334,这些天线元件以4
×
1的模式布置,例如四(4)个天线元件的单个排(1),发射天线210的天线元件334沿第一直线对准,而接收天线212的天线元件334沿第二直线布置,第二直线与第一直线间隔开并平行于第一直线。天线元件210、212的这种布置是天线设计(例如,可以控制视场的天线物理布局设计)的示例。例如,天线的4
×
1天线设计可以提供具有椭圆样式的成形雷达波束,该成形雷达波束提供较宽的车辆横向(cc)信号检测和较少的前/后(f/a)信号检测。根据期望的雷达辐射样式的宽度,可以提供其他天线设计,例如5
×
1天线设计。
123.图25a是图21的印刷电路板84的立体图及由此生成的辐射样式340的图形表示。图25b是由图21的发射天线210生成的辐射样式340的图形视图,其示出了相对于3维空间中的位置的强度。辐射样式340包括具有最高强度的主瓣342和强度低于主瓣342的若干副瓣344。主瓣342的构型——例如尺寸、形状和取向——是确定传感器20、20'、20”、20”'、20
””
、20
””
'的视场28的一个因素。具体地,4
×
1天线配置有助于形成所示的相对宽且狭长的主瓣342,这对于本非接触式对象和/或姿势检测系统10可能特别有效,如上文参照图14至图17所讨论的那样。4
×
1天线配置产生了29度乘以80度的fov 28。主瓣342的最宽维度沿着主轴线am延伸,该主轴线am垂直于发射天线210内的天线元件334的线路。fov 28的宽度w2可以沿着相同的主轴线am延伸(例如,宽度可以与图16中的w1相同)。换言之,fov 28可以配置成沿着车辆12的缓冲器18的长度延伸。
124.图25c是图21的发射天线210的示意性俯视图,其示出了天线元件334的细节,每个天线元件具有相同的尺寸和形状并且以规则的间距彼此间隔开,在天线元件334中的相邻天线元件之间具有相对较细的传导迹线336。在一些实施方式中,发射天线210和/或接收天线212可以以倾斜的角度设置在壳体36内(例如,相对于壳体36的一个或更多个平面表面),以控制fov 28的位置和/或方向。图28示出了所生成的雷达波束视场的一个可能的示例,该雷达波束视场在一个方向(例如,垂直于主轴线am并垂直于作为缓冲器18的车辆12的侧部延伸)上具有窄的波束宽度,并且在横向方向(例如,平行于主轴线am并平行于作为缓冲器18的车辆12的侧部延伸)上具有宽的波束宽度。
125.图26a是根据本公开的各方面的呈转向贴片天线350的形式的发射天线210的示意性俯视图,并且图26b是由图26a的转向贴片天线350生成的辐射样式的图形视图。转向贴片天线350在结构上类似于图25c中所示的4
×
1天线配置,但是天线元件334的尺寸有所变化,和/或天线元件334中的各个天线元件之间的距离有所变化。具体地,与图21的发射天线210相比时,图26a中图示的4
×
1天线配置将主瓣342转向或移位20度,同时保持29度乘以80度
的类似视场28。在一种可能的配置中,转向贴片天线350是没有延伸到缓冲器18的占用区域之外的波瓣的中心转向天线,或者与主瓣相比只有最小化的波瓣延伸到缓冲器18的占用区域之外。这种延伸的波瓣可能有助于在期望的检测视场之外的不期望的姿势被检测到。如图25d和图25e中所示,4
×
1中心转向的接收天线212和发射天线210具有类似的参数,例如具有从主瓣降低-15db(主瓣功率的3%)的旁瓣。3db波束宽度是~21
°
(phi=90
°
)和~74
°
(phi=0
°
)。10db波束宽度是~37
°
(phi=90
°
)和~141
°
(phi=0
°
)。如图25f和图25g所示,5
×
1(在图25c中示出为具有以虚线轮廓示出的额外的贴片334)中心转向的接收天线和发射天线具有类似的参数,例如具有从主瓣降低-13db(主瓣功率的5%)的旁瓣。3db波束宽度是~16
°
(phi=90
°
)和~74
°
(phi=0
°
)。10db波束宽度是~29
°
(phi=90
°
)和~138
°
(phi=0
°
)。本文中的这种天线设计可以控制视场并提供传感器20、20'、20”、20”'、20
””
、20
””
'的远离车辆占用区域的外周界的各种移位式安装,同时允许视场被调节以补偿这种移位式安装,车辆占用区域的外周界例如由外部镶板或附件限定。与传感器直接安装至缓冲器18的内部表面——当缓冲器被损坏时传感器可能被损坏,例如直接安装在缓冲器内表面上的电容式传感器可能发生这种情况——相比,例如传感器20、20'、20”、20”'、20
””
、20
””
'不必安置于或安装至缓冲器,而是可以从缓冲器移位,并且在一种可能的配置中,传感器可以向内(例如,朝向车辆的中心,车辆的中心位于缓冲器18的后方并具有内部车辆表面)并远离外部占用区域安装至车辆12的框架或一体式车身17(具有外部车辆表面的车辆部件的示例),以例如在轻微碰撞和事故期间对传感器20、20'、20”、20”'、20
””
、20
””
'提供保护。传感器20、20'、20”、20”'、20
””
、20
””
'在可能的配置中也可以安装至车辆附件,例如缓冲器18。此外,这样的天线设计可以控制视场并且提供传感器20、20'、20”、20
”’
、20
””
、20
””
'远离车辆占用区域的外周界的各种移位式安装,从而允许视场不受由诸如车辆配件或部件99之类的障碍物造成的对传感器的视线的任何干扰,车辆配件或部件99可能是金属的,包括但不限于消声器、排气管、拖车挂接装置和挂接装置支承结构/管、金属牌照、金属支承支架、缓冲器防护件、绞盘、车底存放的备胎、灯组件等。这样的天线设计不需要额外的反射(例如金属的)元件来使视场成形。
126.这对于将传感器20、20'、20”、20”'、20
””
、20
””
'封装在一个区域中并将fov 28投射到另一更期望的区域可能是有用的。例如,这种配置对于在存在诸如拖车挂接装置或其他硬件之类限制传感器20、20'、20”、20”'、20
””
、20
””
'的安置的干扰的区域中提供fov覆盖28可能是有用的。
127.在一些实施方式中,接收天线212可以具有高增益或接收rf辐射的能力的相关联区域。这样的高增益区域可以类似于发射天线的辐射样式340。类似于发射天线210,接收天线212可以配置为线性阵列,和/或配置为转向贴片天线350,以控制传感器20、20'、20”、20”'、20
””
、20
””
'的fov 28。
128.图27a是根据本公开的各方面的包括发射天线210和接收天线212的印刷电路板84的立体图。具体地,天线210、212中的每个天线配置为2
×
1配置,在天线210、212中的每个天线内具有两个天线元件334。图27b是由图26a的发射天线生成的辐射样式340的图形视图。如图27b中所示,2
×
1发射天线使大致球形的主瓣342从印刷电路板84的平面向外投射。大致球形的副瓣344从印刷电路板84的与主瓣342相反的背面延伸。
129.图28是机动车辆的缓冲器18的示意性俯视图,其示出了根据本公开的各方面的传
感器20、20'、20”、20”'、20
””
、20
””
'的fov 28。具体地,图28示出了相对宽且狭长的主瓣342及其相关联的fov 28,fov 28跨越缓冲器18的相对宽的区域延伸。图28图示了传感器20、20'、20”、20”'、20
””
、20
””
'的取向,由此,每排线性单排发射元件和接收元件基本上沿着与接近传感器的车辆外侧部占用区域垂直的方向延伸,在一个示例中,车辆外侧部占用区域在图28中被示出为缓冲器18。外侧部占用区域也可以包括前缓冲器,或者车辆的侧部、作为示例比如车门槛板。在一种可能的配置中,天线配置成使视场28仅沿着车辆占用区域的侧部的一部分延伸。在另一可能的配置中,天线配置成使视场28沿着车辆占用区域的侧部的整个部分延伸。在这样的配置中,用户可以在车辆侧部周围的任何位置处执行姿势,而不要求必须识别出传感器20、20'、20”、20”'、20
””
、20
””
'的位置并且在传感器20、20'、20”、20”'、20
””
、20
””
'正下方执行姿势。因此,提供了具有宽的激活区域的传感器20、20'、20”、20”'、20
””
、20
””
',而不要求姿势或对象安置成紧接在传感器20、20'、20”、20”'、20
””
、20
””
'下方以使传感器20、20'、20”、20”'、20
””
、20
””
'能够检测到该姿势或对象。
130.图29a是机动车辆12的缓冲器18的示意性侧视图,其示出了具有转向天线350的传感器20、20'、20”、20”'、20
””
、20
””
'的视场28,并且具有向外延伸超出车辆12的占用区域142的视场28。图29b类似于图29a,但是图29b具有移位的fov 28',该fov 28'未延伸超出车辆12的占用区域142。换言之,图29a和图29b图示了在不需要可调节支架或特征的情况下使用波束转向对fov 28进行移位。
131.图30是根据本公开的各方面的机动车辆12的缓冲器18内的传感器20、20'、20”、20”'、20
””
、20
””
'的剖视侧视图。具体地,图30示出了碎屑354,例如污物、灰尘、岩石和/或湿气,碎屑354可能积聚在传感器20、20'、20”、20”'、20
””
、20
””
'的壳体36与缓冲器18的内表面356之间,例如积聚在形成于壳体36与内表面之间的间隙g中。这样的碎屑354会干扰rf辐射26的传输,并且因此可能对传感器20、20'、20”、20”'、20
””
、20
””
'的操作产生不利影响。在一些实施方式中,传感器20、20'、20”、20”'、20
””
、20
””
'的壳体36可以抵靠缓冲器18的内表面356齐平地安装,以使供这种碎屑354侵入的空间最小化和/或防止产生供这种碎屑354侵入的空间。例如,传感器20、20'、20”、20”'、20
””
、20
””
'的壳体36可以抵靠缓冲器18的内表面356齐平地安装,使得在壳体36与内表面之间不提供间隙。在如图30a中所示的另一可能的配置中,视场28可以投射穿过的缓冲器18的饰件不平行于地面9,并且印刷电路板(pcb)84不定位成平行于缓冲器18的饰件,因此在传感器20、20'、20”、20”'、20
””
、20
””
'的壳体36与缓冲器18的饰件之间产生了不规则的空气间隙(被示出为雷达传感器壳体36下方的间隙g1、g2的差)。由具有调谐天线的传感器20、20'、20”、20”'、20
””
、20
””
'发射和接收的、穿过不规则的空气间隙和缓冲器18的饰件投射的辐射不会被不利地衰减以至于影响视场28。图31示出了缓冲器18内的传感器20、20'、20”、20”'、20
””
、20
””
'的剖视侧视图,其与图30类似,但是在雷达壳体36与缓冲器18的内表面365之间增加了密封件358。密封件358可以由弹性材料形成,例如橡胶、硅等,且密封件358起到防止碎屑354进入天线210、212与缓冲器18之间的作用。
132.如图32中最佳示出的,还提供了操作用于机动车辆12的传感器20、20'、20”、20”'、20
””
、20
””
'(例如,雷达)以感测机动车辆12旁边的姿势和对象中的至少一者的方法。该方法包括将雷达壳体36安装在机动车辆12上的步骤400。雷达壳体36具有设置在雷达壳体36内的天线210、212。该方法继续进行步骤402:将天线210、212配置成通过视场28投射射频能
量26,以检测机动车辆12的占用区域142内的对象(例如,脚150)或姿势。天线210、212配置成防止视场28延伸到机动车辆12的占用区域142之外。
133.该方法还可以包括使用天线210、212将射频能量26向下并远离机动车辆12朝向机动车辆12下方的地表面转向的步骤。此外,该方法还可以包括使用耦接至雷达壳体36的图标投影仪162在地表面上或由天线210、212检测到的对象上生成投影图像164的步骤。该方法还可以包括使用耦接至雷达壳体36的支架38对雷达壳体36进行保持和定位以控制视场28的步骤。另外,该方法可以包括将雷达壳体36抵靠机动车辆12的内表面356齐平地安装的步骤,以使碎屑354的侵入最少。
134.例如,如上所述,可以调节传感器20、20'、20”、20”'、20
””
、20
””
'定位,或者可以采用波束转向,以对fov 28进行移位。另外,首先参照图33a和图33b,作为对使用天线210、212的定位调节或波束转向的附加或代替,用于机动车辆12的传感器20、20'、20”、20”'、20
””
、20
””
'的雷达壳体500可以包括由雷达吸收材料制成的第一示例性雷达吸收器502以用于波束形成。具体地,壳体500例如可以由聚合物(例如聚碳酸酯(pc)和/或丙烯腈-丁二烯-苯乙烯(abs))形成,而雷达吸收器502可以由吸收离开或返回传感器20、20'、20”、20”'、20
””
、20
””
'的射频能量的碳化硅填充聚合物或橡胶形成。吸收器500设置在壳体500外侧;然而,吸收器500可以被认为是壳体500的一部分。图33a中还示出了与反射表面504一起示出且与印刷电路板(pcb)47、84有关的近似雷达视场28。图33b示出了吸收面板502中的示例孔口506,孔口506构造成允许从发射天线210发射并在从反射表面504反射之后由接收天线212接收的雷达穿过该孔口。类似地,图34a至图34b示出了与天线210、212有关并且设置在壳体500内的第二示例性雷达吸收器502'。例如,通过这两个雷达吸收器502、502',雷达波束检测区或视场28可以被控制28(例如,大约30度)从而紧接在传感器20、20'、20”、20”'、20
””
的位置下方或位于传感器20、20'、20”、20”'、20
””
的位置正下方。这样的雷达吸收器502、502'可以减少由不正确的脚42、150的位置(例如,位于机动车辆12的占用区域142之外)引起的无意激活。换言之,在没有本文描述的技术的情况下,传感器20、20'、20”、20”'、20
””
、20
””
'的视场28可能不必要地大(例如,大约160度),并且例如当脚42、150位于车辆12后方时可能发生错误激活。
135.图35是示出雷达吸收器502、502'的测试计划的表格。图6图示了测试计划中使用的模具508,该模具具有用于注入混合物以形成雷达吸收器502、502'的四个孔510(图36a至图36b示出了在计算机辅助设计应用中绘制的模具508,并且图36c和图36d示出了由铝制成的模具),以及位于中间供空气逸出的一个中心孔512。
136.实验如下进行。首先,确定了针对24ghz级传感器频率的晶粒尺寸。接下来,研究了针对不同频率(77ghz)的晶粒尺寸。具体地,测试了8微米、18微米、35微米、70微米,并且70微米表现最好。然后,通过试验确定了材料厚度——铝模具508设计成使得雷达吸收材料能够以不同的厚度被模制。因此,对目标厚度进行了研究(材料厚度与波长有关)。从天线210、212到吸收器502、502'(吸收材料)的最佳距离已确定并与缓冲器18距地面的高度相匹配。选择了聚合物/橡胶基质、platsil73-60硅橡胶。
137.比电阻(electrical specific resistance)对雷达的吸收性很重要,并且比电阻的目标理想地为0.01欧姆-厘米至100欧姆-厘米。碳化硅(sic)是微波能量(300mhz至300ghz)的强吸收剂,并且可回收、抗腐蚀且无毒。作为完美的非侵入性替代方案,sic可以
成为用于提高非极性反应混合物的加热速率的理想材料。它强烈吸收微波能量,并且随后经由传导现象将生成的热能迅速地传送至反应混合物。这使得微波可穿透或吸收性差的反应混合物能够被有效地加热到极高的温度和压力。此外,由于碳化硅的高熔点(约2700℃)和非常低的热膨胀系数,其可以在极高的温度下被采用。另外,由于材料内的快速热分布,可以排除热点,并且保证整个材料内的均匀温度分布和统一加热。实际上,sic是几乎不可破坏且完全可回收的固体材料,而且提供了不同形状的微波反应器附件,其可以被用于单模微波反应器和多模微波反应器两者。
138.例如,使用混合有纳米碳化硅(sic)的纳米碳黑(cb)制备吸收介质。该介质改善了单一cb吸收剂的吸波特性和波段。材料的微观结构、电导率、介电性能和微波吸收可以分别借助于场发射扫描电子显微镜、三电极法和矢量网络分析仪来研究。结果显示,sic可以降低cb/环氧树脂复合材料的渗流阈值。加入一定质量的sic可以改善复合材料的微波吸收。例如,当按重量计5%的碳黑混合有按重量计50%的sic以制造厚度为2mm的复合材料时,在9千兆赫(ghz)的最大反射损耗变为-41分贝(db),而-10db带宽达到6ghz。因此,这样制备的复合材料具有用于电磁吸收的潜能。
139.使用碳化硅晶粒,通过本文中讨论的实验,确定了最佳厚度、晶粒尺寸和组成、最高雷达衰减。碳化硅填充的橡胶件或吸收器可以在10db至20db下衰减雷达信号。还确定了用于实现衰减目标的最佳碳化硅颗粒尺寸、与橡胶的混合比率以及(例如,吸收器502、502'的)零件厚度。图37中示出了3.15毫米(mm)的示例厚度th。如所公开的,本文还确定了雷达天线210、212与吸收材料(即,吸收器502,502')之间的用于足够的衰减和波束控制的距离以及用于正确波束控制的孔口形状和尺寸。注意,可以使用任何雷达吸收材料,只要实现最小衰减即可。其他雷达吸收材料包括碳纳米管、碳黑。
140.图38a至图38c图示了根据本公开的各方面的雷达吸收器502、502'的孔口506的可选方案。图39示出了根据本公开的各方面评估的使用限制。更详细地,用列出的碳化硅颗粒尺寸、浓度和3层厚度测量1/4波长
±
10%制造硅聚合物层并进行测试。测量了各种sic屏幕在24ghz雷达前的信号衰减,以确定在雷达被包括sic的吸收器502、502'完全阻挡的情况下,哪种材料组合产生最大信号衰减。
141.图40a至图40d示出了根据本公开的各方面的壳体500(图40a)、模具508(图40a)和壳体500中的雷达pcb 47、84的布置。在图40d中,雷达外壳或夹具514被示出为模拟距后缓冲器18的高度并且与附近的障碍物516相距26英寸。提供了用于硅聚合物罩(吸收器502、502')的空间,并且以一致的间距保持传感器20、20'、20”、20”'、20
””
。
142.图41a至图41b、图42a至图42e、图43、图44、图45以及图46a至图46b示出了根据本公开的各方面的评估结果。更具体地,如图41a中所示,由于通过测试观察到了较大方差,因此记录了30次摆动试验以获得对材料信号衰减的更准确理解。当雷达信号或传输处于活动状态时,同相(i)信号和正交(q)信号的所有绝对值被加在一起,以确定绝对信号值。图41b示出了显示衰减的i信号和q信号的示例图。
143.图42a示出了没有材料(即,没有sic吸收器502,502')的情况下的i信号和q信号。图42b示出了具有吸收器502、502'的情况下的i信号和q信号,该吸收器502、502'具有8微米sic晶粒、30%浓度和3.5mm厚度th。图42c示出了具有吸收器502、502'的情况下的i信号和q信号,该吸收器502、502'具有18微米sic晶粒、30%浓度和3.5mm厚度th。图42d示出了具有
吸收器502、502'的情况下的i信号和q信号,该吸收器502、502'具有35微米sic晶粒、30%浓度和3.5mm厚度th。图42e示出了具有吸收器502、502'的情况下的i信号和q信号,该吸收器502、502'具有70微米sic晶粒、26%浓度和3.5mm厚度th。
144.图43和图44中示出了雷达信号衰减。关于图43,对所有sic微米尺寸的30%浓度、3.5mm厚度进行了重复测试以验证微米尺寸对衰减的影响。增加微米尺寸提供了较大的信号衰减,其中,-11.56db≈73.59%衰减,-6.49db≈52.10%衰减。关于图44,获得了30个测试样本,测试了吸收器502、502'的另外厚度th和sic浓度以验证吸收器502、502'的厚度th和sic浓度的影响。在所有测试的聚合物中,信号衰减的范围相当一致。70微米信号衰减的最小值和最大值被发现为-14.82db≈81.84%衰减,-6.02db≈50.01%衰减。测试结果的结论是:如图45中所示,碳化硅含量为28%、厚度th为3.15mm的填充70微米的碳化硅的橡胶可以提供-9.2至-14.8的信号衰减。所以,如图46a和图46b中所示,测试的最大颗粒或晶粒尺寸(70微米)对24ghz雷达波造成的衰减最大。大批量的测试验证了:与未覆盖的数据样本相比,70微米的sic衰减了50%与80%之间的信号。图46a中示出了未覆盖的数据样本,并且图46b中示出了70微米的碳化硅罩或吸收器502、502'、30%浓度、3.5mm厚度吸收器502、502'的测试数据。
145.这种吸收器502、502'的优点包括将雷达检测区或视场28限制于特别限定的区域。如上所述,实现了能够限制雷达视场的充分衰减。
146.出于说明和描述的目的已经提供了若干实施方式的前述描述。其不旨在穷举或限制本公开。特定实施方式的各个元件或特征通常不限于该特定实施方式,而是,在适用的情况下,即使没有具体示出或描述,特定实施方式的各个元件或特征也能够互换并且可以在选定的实施方式中使用。特定实施方式的各个元件或特征也可以以多种方式变化。这样的变型不被视为是脱离本公开,并且所有这样的修改旨在被包括在本公开的范围内。本领域技术人员将认识到,与示例检测系统相关联地公开的构思可以同样地在许多其他系统中实现以控制一个或更多个操作和/或功能。
147.本文中所使用的术语仅出于描述特定的示例实施方式的目的,而非意在进行限制。除非上下文另有明确指示,否则如本文中所使用的单数形式“一”、“一个”和“该”也可以旨在包括复数形式。术语“包括”、“包括有”、“包含”和“具有”是包含性的,并且因此指明了所阐述的特征、整体、步骤、操作、元件和/或部件的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、元件、部件和/或它们的组。除非被特别指定为执行顺序,否则本文中描述的方法步骤、过程和操作不应被解释为必须要求其以所论述或图示的特定顺序执行。还应理解的是,可以采用附加步骤或替代性步骤。
148.当元件或层被称为“位于另一元件或层上”、“接合至”、“连接至”或“耦接至”另一元件或层时,该元件或层可以直接位于另一元件或层上、直接接合至、直接连接至或直接耦接至另一元件或层,或者可以存在中间的元件或层。相比之下,当元件被称为“直接位于另一元件或层上”、“直接接合至”、“直接连接至”或“直接耦接至”另一元件或层时,可以不存在中间的元件或层。用于描述元件之间关系的其他词语(例如,“位于
……
之间”与“直接位于
……
之间”、“相邻”与“直接相邻”等)应当以类似的方式进行解释。如本文中所使用的,术语“和/或”包括相关联的所列项中的一个或更多个项的任何组合和全部组合。
149.尽管在本文中可以使用术语第一、第二、第三等描述各种元件、部件、区域、层和/
或部段,但这些元件、部件、区域、层和/或部段不应受这些术语的限制。这些术语可以仅用于将一个元件、部件、区域、层或部段与另一区域、层或部段区分开。除非上下文明确指示,否则比如“第一”、“第二”和其他数字术语之类的术语在本文中使用时不暗示次序或顺序。因此,在不脱离示例实施方式的教导的情况下,下面讨论的第一元件、部件、区域、层或部段可以被称为第二元件、部件、区域、层或部段。
150.为了便于描述,本文中可以使用比如“内”、“外”、“下面”、“下方”、“下”、“上方”、“上”、“顶”、“底”等与空间相关的术语来对如图中图示的一个元件或特征与另一元件或特征的关系进行描述。与空间相关的术语可以旨在涵盖装置在使用中或操作中除了图中所描绘的取向之外的不同取向。例如,如果图中的装置被翻转,被描述为位于其他元件或特征“下方”或“下面”的元件则将被定向在其他元件或特征“上方”。因此,示例术语“下方”能够涵盖上方和下方两种取向。装置可以以其他方式定向(旋转90度或旋转处于其他取向),并且本文中使用的与空间相关的描述被相应地解释。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。