1.本文中所公开的主题涉及激光加工设备的领域。
背景技术:
2.通过激光辐射加工表面和部件具有广泛的应用,例如表面结构化。例如,wo 2018/197555 a1公开了一种用于生产riblets(即肋条)的方法和设备,其中通过激光干涉结构化(dlip-direct laser interference patterning(直接激光干涉图案))来将肋条引入到表面中,特别是已经涂漆且固化的表面中。具有以这种方式生产的肋条的部件使得飞机、船舶和风力涡轮机以较小的流动阻力运行。
技术实现要素:
3.鉴于上述情况,需要一种改进技术,该技术实现具有改进特性的表面的结构化。
4.独立权利要求的主题考虑了这种需要。在从属权利要求中给出了有利的实施例。
5.根据本文公开的主题的第一方面,公开了一种设备,特别是一种激光加工设备。
6.根据所述第一方面的实施例,公开了一种激光加工设备,该激光加工设备包括:光学装置;光学装置具有用于接收激光束的输入端;并且其中光学装置具有分束器,该分束器将激光束分成至少两个子束;并且其中光学装置将子束重新组合在一起以形成激光光斑,并在该激光光斑中产生干涉图案;其中激光束在输入端处的位置变化和/或激光束相对于输入端的入射角的变化导致以下至少一种:(i)激光光斑的中心与在预定方向上最接近的干涉图案的干涉最大值之间的距离的距离变化dp,(ii)激光光斑中心位置的位置变化ds;其中光学装置被配置为使得如下条件适用于连续位置变化:
7.|ds| |dp|=n*l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式1
8.并且其中n是自然数;其中l为在预定方向上干涉图案的两个相邻干涉最大值之间的距离,包括
±
5%的容差范围;并且其中距离变化dp由第一距离与第二距离之间的差定义;并且其中在预定方向上定义第一距离和第二距离中的每一个。
9.根据本文公开的主题的第二方面,公开了一种方法。
10.根据第二方面的实施例,公开了一种用于表面的干涉结构化的方法,该方法包括:在表面上产生第一干涉图案;在表面产生第二干涉图案;其中第一干涉图案和第二干涉图案由具有输入端的单个光学装置产生;其中第一干涉图案和第二干涉图案由光学装置改变激光束相对于输入端的位置和/或激光束相对于输入端的入射角来产生,从而(i)激光光斑的中心与在预定方向上最接近的干涉图案的干涉最大值之间的距离的距离变化dp,和/或(ii)激光光斑中心位置的位置变化ds;其中光学装置被配置为使得如下条件适用于连续位置变化:
11.|ds| |dp|=n*l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式1
12.并且其中n是自然数;l是第一干涉图案的两个相邻的干涉最大值的之间的距离,包括
±
5%的容差范围;并且其中距离变化dp由第一距离和第二距离之间的差定义;并且其
中在预定方向上定义第一距离和第二距离中的每一个。
13.根据第三方面的实施例,公开了一种用途。
14.根据第三方面的实施例,公开使用光学装置改变激光束在输入端处的位置和/或改变激光束相对于输入端的入射角以产生第一干涉图案和第二干涉图案,从而导致以下至少一项:(i)激光光斑的中心和在预定方向最近的干涉图案的干涉最大值之间的距离的距离变化dp,(ii)激光光斑的中心位置的位置变化ds;其中光学装置被配置为使得如下条件适用于位置的连续变化:
15.|ds| |dp|=n*l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式1
16.其中n是自然数;l为干涉图案的两个相邻的干涉最大值之间的距离,包括
±
5%的容差范围;并且其中距离变化dp由第一距离和第二距离之间的差定义;并且其中在预定方向上定义第一距离和第二距离中的每一个。
17.根据本文公开的主题的第四方面,公开了一种激光加工设备。
18.根据第四方面的实施例,公开了一种激光加工设备,该激光加工设备包括:光学装置;光学装置具有用于接收激光束的输入端;并且其中光学装置具有分束器,该分束器将激光束分成至少两个子束;并且其中光学装置将子束重新组合在一起以形成激光光斑,并在激光光斑中产生干涉图案;其中激光束在输入端处的第一状态产生第一干涉图案并且激光束的第二状态产生第二干涉图案;其中第一状态和第二状态区别在于以下至少一个:(i)激光束在输入端处的位置和(ii)激光束相对于输入端的入射角;并且其中光学装置被配置为使得第二干涉图案在相位上延续第一干涉图案。
19.根据本文公开的主题的第五方面,公开了一种方法。
20.根据第五方面的实施例,公开了一种方法,该方法包括:提供具有分束器的光学装置,该分束器将激光束分成至少两个子束,其中光学装置将子束重新组合在一起以形成激光光斑;将激光束对准到光学装置的输入端上;其中激光束在输入端处的第一状态在第一位置p1处产生激光光斑,其中该激光光斑具有第一干涉图案;其中激光束在输入端处的第二状态在第二位置p2处产生激光光斑,该激光光斑具有第二干涉图案;其中第一状态和第二状态的不同之处以下至少一个(i)激光束在输入端处的位置和(ii)激光束相对于输入端的入射角;并且其中针对位置变化的ds=p1-p2,光学装置提供第一光路长度差di_a和第二光路长度差di_b之间的差di_ab=di_a-di_b,其导致激光光斑的中心和在预定方向上最接近的干涉图案的干涉最大值之间的距离变化dp,使得第二干涉图案在相位上延续第一干涉图案。
21.根据本文公开的主题的第六方面,公开了一种激光加工设备。
22.根据第六方面的实施例,公开了一种激光加工设备,该激光加工设备包括:光学装置;其中光学装置具有用于接收激光束的输入端;其中光学装置具有分束器,该分束器将激光束分成至少两个子束;其中,光学装置将两个子束重新组合在一起以形成激光光斑,并在激光光斑中产生干涉图案;其中激光束在输入端处的第一状态产生第一干涉图案并且激光束的第二状态产生第二干涉图案,其中第一状态和第二状态区别于以下至少一个(i)激光束在输入端处的位置和(ii)激光束相对于输入端的入射角;其中第一干涉图案的中心和第二干涉图案的中心具有对应于至少单个激光光斑直径的距离,特别地至少是激光光斑直径的五倍,进一步特别地至少是激光光斑直径的十倍,进一步尤其至少是激光光斑直径的二
十倍;其中由于从第一状态到第二状态的状态变化,每个子束的辐射路径的路径长度的变化小于从分束器到激光光斑的总路径长度的
±
5%,特别是小于
±
1%,此外特别是小于
±
0.5%。
23.根据本文公开的主题的第七方面,公开了一种物体。
24.根据第七方面的实施例,公开了一种物体,具有带有周期性表面结构的表面的物体,其中所述表面结构由圆周线界定,并且其中至少逐段地在圆周线区段上的圆周线具有基本元素的周期性重复的形状,并且其中表面结构的周期性不同于圆周线片段的周期性。
25.根据本文公开的主题的第八方面,公开了一种物体。
26.根据第八方面的实施例,公开了一种物体,具有如下表面,所述表面具有表面结构;其中表面结构具有相对于所述表面的最大深度;表面结构从表面结构边缘处的第一位置直至第二位置的深度延伸增加到最大深度延伸的80%;第一位置与第二位置之间的距离至少为100μm。
27.本文公开的主题的各个方面和实施例所基于的基本构思是:激光光斑的干涉图案在相位上延续到激光光斑之外。这例如可以通过相位的适当调节来完成,例如通过提供第一状态的光路径差和第二状态的光路径差之间合适的差di_ab。此外,发明人发现:与相关专家的意见相悖,至少对于特定的光学装置,仅仅通过光学装置的构造引起干涉图案在激光光斑的空间范围之外的“自动”的相位真实延续也是可行的。在任何情况下,在通过周期性图案进行大面积处理是有利的应用中,通过相位真实延续可以极其有效地配置激光加工设备。
28.根据第一方面的实施例,激光加工设备被设计成提供本文公开的一个或多个实施例的功能和/或提供本文公开的一个或多个实施例所需的功能,特别是第一、第二、第三、第四、第五、第六、第七和/或第八方面的实施例。
29.根据第二方面的实施例,该方法是被设计为被设计成提供本文公开的一个或多个实施例的功能和/或提供本文公开的一个或多个实施例所需的功能,特别是第一、第二、第三、第四、第五、第六、第七和/或第八方面的实施例。
30.根据第三方面的实施例,该用途被设计成提供本文公开的一个或多个实施例的功能和/或提供本文公开的一个或多个实施例所需的功能,特别是第一、第二、第三、第四、第五、第六、第七和/或第八方面的实施例。
31.根据第四方面的实施例,激光加工设备被设计成提供本文公开的一个或多个实施例的功能和/或提供本文公开的一个或多个实施例所需的功能,特别是第一、第二、第三、第四、第五、第六、第七和/或第八方面的实施例。
32.根据第五方面的实施例,该方法被设计成提供本文公开的一个或多个实施例的功能和/或提供本文公开的一个或多个实施例所需的功能,特别是第一、第二、第三、第四、第五、第六、第七和/或第八方面的实施例。
33.根据第六方面的实施例,激光加工设备被设计成提供本文公开的一个或多个实施例的功能和/或提供本文公开的一个或多个实施例所需的功能,特别是第一、第二、第三、第四、第五、第六、第七和/或第八方面的实施例。
34.根据第七方面的实施例,该物体被设计成提供本文公开的一个或多个实施例的功能和/或提供本文公开的一个或多个实施例所需的功能,特别是第一、第二、第三、第四、第
五、第六、第七和/或第八方面的实施例。
35.根据第八方面的实施例,该物体被设计成提供本文公开的一个或多个实施例的功能和/或提供本文公开的一个或多个实施例所需的功能,特别是第一、第二、第三、第四、第五、第六、第七和/或第八方面的实施例。
36.本文公开的主题的进一步优点和特征从当前优选实施例的以下示例性描述中显现,然而,本公开不限于此。本技术的附图中的各个图仅被视为示意性的,不一定按比例绘制。
附图说明
37.图1示意性地示出了根据本文公开的主题的实施例的光学装置的功能原理。
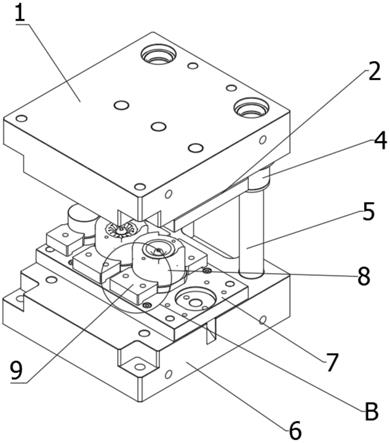
38.图2示出了根据本文公开的主题的实施例的激光加工设备。
39.图3示出了根据本文公开的主题的实施例的激光加工设备的一部分。
40.图4示出了根据本文公开的主题的实施例的激光加工设备的一部分。
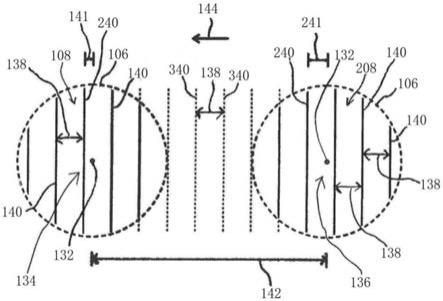
41.图5示出了第一干涉图案和第二干涉图案,其可以由根据本文公开的主题的实施例的激光加工设备产生。
42.图6以截面图示出了根据本文公开的主题的实施例的激光加工设备的光学装置的一部分。
43.图7示出了根据本文公开的主题的实施例的物体的一部分。
44.图8示出了根据本文公开的主题的实施例的物体的一部分。
45.图9示出了根据本文公开的主题的实施例的物体的一部分。
46.图10示出了图9中的表面结构的一部分沿图9中的剖面线x-x的剖视图。
47.图11示出了根据本文公开的主题的实施例的表面结构的一部分的平面图。
48.图12和图13示出了图11中表面结构沿图11中的剖面线xii-xii和xiii-xiii的横截面图。
49.图14示出了根据本文公开的主题的实施例的激光加工设备。
具体实施方式
50.下文描述本文公开的主题的示例性实施例,其中例如涉及激光加工设备、方法、用途和物体。应该强调的是,不同方面、实施例和示例的特征的任何组合当然是可能的。具体地,一些实施例是参考方法或用途来描述的,而其他实施例是参考设备来描述的,尤其是参考激光加工设备或物体描述。然而,本领域技术人员将从以上和以下描述、权利要求和附图推断,除非另有说明,否则各个方面、实施例和示例的特征可以组合并且这些特征的组合应被视为由本发明公开。例如,即使是与方法或用途相关的特征也可以与与设备相关的特征组合(例如激光加工设备或物体),反之亦然。此外,与设备相关的实施例的特征可以与与方法或用途相关的对应特征组合。随着公开的方法,方法或功能的实施例、一个或多个致动器以及具有与致动器交互的功能的控制设备也应视为被公开的,所述控制设备被设计用于执行所述方法或功能。此外,随着设备功能的公开,定义了功能而没有设备特征的相应方法也被视为公开。此外,干涉图案的特征定义了表面结构或加工点(由具有干涉图案的激光光斑加工的表面区域)的类似特征。
51.一种方法可以使用任何合适的编程语言(例如java、c#等)实现为计算机可读指令代码,并且可以存储在计算机可读介质上(可移动磁盘、易失性或非易失性存储器、嵌入式内存/处理器等)。指令代码可用于对计算机或任何其他可编程处理器设备进行编程以执行预期功能。指令代码可以从网络获得,例如从万维网,可以从该网络下载指令代码。
52.在此公开的主题可以通过程序元素或软件来实现。然而,本公开的目的也可以使用一个或多个特定的电子电路或硬件来实现。此外,本公开的主题还可以以混合形式实现,即通过软件模块和硬件模块的组合实现。
53.除非另有说明,否则数值应理解为包括
±
5%的窗口,即,例如,10mm长度的指示包括,根据一个实施例,在(10mm
±
5%)=[9.95mm;10.05mm]区间内的长度,以及根据一个实施例,50%的百分比包括在50%
±
5%=[47.5%;52.5%]区间内的百分比。根据另一实施例,数值应理解为包括
±
10%的窗口。
[0054]
根据一个实施例,公开了一种设备。根据另一实施例,该设备是激光加工设备。根据另一实施例,该设备具有光学装置,该光学装置具有用于接收激光束的输入端。根据另一实施例,光学装置具有分束器,该分束器将激光束分成两个或更多个子束,其中该光学装置将子束重新组合在一起以形成激光光斑,以便在激光光斑中产生干涉图案。根据另一实施例,其中激光束在输入端处的位置变化和/或激光束相对于输入端的入射角的变化导致以下至少一种:(i)激光光斑的中心与在预定方向上最接近的干涉图案的干涉最大值之间的距离的距离变化dp,(ii)激光光斑中心位置的位置变化ds。根据另一实施例,光学装置被配置为使得如下条件适用于连续位置变化ds:
[0055]
|ds| |dp|=n*l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式1
[0056]
并且其中n是自然数。l在此为在预定方向上干涉图案的相邻的两个干涉最大值之间的距离,包括
±
5%的容差范围。换句话说,根据一个实施例,该条件不必完全满足,但与准确值n*l的
±
5%数量级的偏差也是可以接受的,即容差范围内的偏差也满足该条件。通常,根据另一实施例,容差范围是
±
3%,或者根据又一实施例,
±
1%。根据又一实施例,完全满足等式1(容差范围0%)。此外,由第一距离和第二距离之间的差定义距离变化dp,其中在预定方向上定义第一距离和第二距离中的每一个。第一距离和第二距离相应地给出了所讨论的激光光斑的中心与在预定方向上最近的干涉图案的干涉最大值之间的距离。||是众所周知的绝对值函数,即对于x≥0,|x|=x,和对于x《0,|x|=-x。
[0057]
相应地,根据一个实施例,一种方法包括以下一个或多个实施例。根据一个实施例,一种用于表面干涉结构化的方法包括以下一个或多个特征:在表面上生成第一干涉图案;在表面上产生第二干涉图案;其中第一干涉图案和第二干涉图案通过具有输入端的单个光学装置生成。根据一个实施例,第一干涉图案和第二干涉图案通过光学装置改变激光束在输入端处的位置和/或激光束相对于输入端的入射角来产生,从而(i)实现激光光斑的中心与在预定方向上最近的干涉图案的干涉最大值之间的距离的距离变化dp,和/或(ii)实现激光光斑中心位置的位置变化ds。
[0058]
根据另一实施例,方法包括以下特征中的一个或多个:提供具有分束器的光学装置,该分束器将激光束分离至少两个子束,其中光学装置将激光子束重新组合在一起以形成激光光斑;将激光束对准到光学装置的输入端上;其中激光束在输入端处的第一状态在第一位置p1处产生激光光斑,该激光光斑具有第一干涉图案;其中激光束在输入端处的第
二状态在第二位置p2处产生激光光斑,该激光光斑具有第二干涉图案;其中,第一状态和第二状态的不同在于(i)激光束在输入端处的位置和(ii)激光束相对于输入端的入射角中的至少一个;并且其中光学装置(或根据另一实施例的方法)针对位置变化ds=p1-p2提供在第一光路长度差di_a和第二光路长度差di_b之间的差di_ab=di_a-di_b,其提供了激光光斑的中心与在预定方向上最接近的干涉图案的干涉最大值之间的距离变化dp,使得第二干涉图案在相位上延续第一干涉图案。
[0059]
根据一个实施例,光学装置被配置为使得根据等式1的条件适用于连续位置变化d。
[0060]
激光束在输入端处的位置和/或激光束相对于输入端的入射角的变化也可以更一般地描述为激光束在输入端处的状态。根据一个实施例,光学装置的输入端由分束器形成。当然,这不排除光学元件布置在分束器前面的事实,然而,在这个意义上,光学元件不属于光学装置。
[0061]
在这个意义上,根据一个实施例,激光束在输入处的第一状态在激光光斑中产生第一干涉图案(在第一激光光斑中,第一激光光斑的中心位于第一位置p1)并且激光束在输入端处的第二状态在激光光斑中产生第二干涉图案(在第二激光光斑中,第二激光光斑的中心在第二位置p2),其中第一状态和第二状态的不同在于至少在于(i)激光束在输入端处的位置和(i)激光束相对于输入端的入射角之一。
[0062]
根据前面的陈述,根据一个实施例,一种用途包括通过改变激光束在输入端处的位置和/或改变激光束相对于输入端的入射角将光学装置用于产生第一干涉图案和第二干涉图案并且由此导致以下各项中的至少一项:(i)激光光斑中心与在预定方向上最近的干涉图案的干涉最大值之间的距离的距离变化dp,(ii)激光光斑的中心位置的位置变化ds,其中光学装置被配置为使得满足根据等式1的条件。
[0063]
根据又一实施例,激光加工设备具有以下一个或多个特征:光学装置;其中光学装置具有用于接收激光束的输入端;并且其中该装置具有将激光束分成至少两个子束的分束器;并且其中光学装置将子束重新组合在一起以形成激光光斑并在激光光斑中产生干涉图案;其中激光束在输入端的第一状态产生第一干涉图案,激光束在输入端处的第二状态产生第二干涉图案;并且其中第一状态和第二状态在以下至少一个方面不同:(i)激光束在输入端处的位置和(ii)激光束相对于输入端的入射角;并且其中光学装置被配置为使得第二干涉图案在相位上延续第一干涉图案。
[0064]
输入端处激光束状态的变化,并且尤其是激光束在输入端处的位置变化和/或激光束相对于输入端的入射角的变化,不排除光学装置和表面可以相对于彼此移动以便使更大面积的表面结构化。例如,在2光束干涉的情况下(这会导致具有大量平行线的干涉图案),光学装置可以在线的纵向延伸的方向上移动,以便实现大面积的表面结构化,例如在由干涉图案产生的表面结构在例如飞机部件的流体元件上形成所谓的肋条的应用中,这是合乎需要的。
[0065]
根据一个实施例,光学装置被配置为使得第二干涉图案在相位上延续第一干涉图案。
[0066]
根据一个实施例,光学装置的相应配置例如可以是有源的,例如通过合适的致动器装置调整距离变化dp,所述致动器装置例如作用于反射镜装置或光学介质。例如,可以为
此使用楔形光学元件,其进一步移入或移出一个子束,由此可以增加或减少楔形光学元件内的子束的路径长度并且可以改变相位(以及dp)。致动器装置的控制信号例如可以通过查找表确定激光束的状态来生成,或者,例如,也可以由经过适当训练的人工智能生成。
[0067]
此外,根据一个实施例,用于第一干涉图案的相位延续的光学装置的配置可以具有无源配置,例如,如果光学装置的各个元件以及各个光学元件的相互作用被配置为,至少在一定有效范围内,例如激光束状态的有效范围(例如在激光束在输入端处的位置和/或激光束相对于输入端的入射角的特定有效范围内)或位置变化ds的有效范围,使得第一干涉图案的相位真实延续仅基于光学装置的(静态)结构进行。通常,根据一个实施例,至少在一个有效范围内满足等式1。
[0068]
根据一个实施例,激光束在输入端处的第一状态定义第一干涉图案和激光光斑的中心的第一位置p1,并且激光束在输入端处的第二状态定义第二干涉图案和激光光斑的中心的第二位置p2,其中在第一状态下包括至少两个子束的一对子束具有第一光路长度差di_a并且第二状态下的一对子束具有第二光路长度差di_b;并且其中针对相应的位置变化ds=p1-p2,光学装置提供第一光路长度差di_a和第二光路长度差di_b之间的差di_ab=di_a-di_b,这导致距离变化dp,使得第二干涉图案在相位上延续第一干涉图案。
[0069]
根据一个实施例,定义第一距离和第二距离两者的预定方向是远离激光光斑的中心并且朝向在该方向上最近的干涉最大值的方向(例如第一干涉图案,即根据一个实施例,第一干涉图案定义预定方向。只要干涉图案例如具有多条平行干涉线(如由两光束干涉产生),则根据一个实施例,预定方向是垂直于干涉线的方向。例如,在这种情况下,预定方向可以定义为垂直于干涉线并从激光光斑中心指向右侧的方向。
[0070]
如本领域技术人员所知,在三个或更多子束的干涉情况下,例如在三个子束的情况下(三光束干涉),干涉图案例如为点图案。根据一个实施例,存在相互线性独立的两个预定方向,沿着所述预定方向干涉图案可以在相位上是连续的,这在三光束干涉的情况下特别有利。
[0071]
不言而喻,虽然在一些实施例中仅参考了各个不同的距离,例如第一距离和第二距离,但是只要满足等式1中的指定条件,相关实施例就适用于所有距离。
[0072]
根据一个实施例,等式1中指定的条件在预定的有效范围(例如由光学装置定义的有效范围)内有效。根据一个实施例,等式1中的条件至少适用于等于激光光斑直径的位置变化值。根据另一实施例,等式1中的条件适用于从起始位置(位置变化等于零)直到位置变化值的连续位置变化ds。根据另一实施例,位置变化值等于激光光斑直径的两倍,或者根据其他实施例,等于激光光斑直径的五倍、十倍或二十倍。根据一个实施例,输入端具有第一区域和第二区域,并且激光加工设备具有致动器装置,用于将激光束定位在第一区域中然后定位在第二区域中。
[0073]
例如,根据一个实施例,致动器装置是激光扫描仪的致动器装置,通过该致动器装置,激光束可以在输入端,特别是输入端的第一区域和第二区域上扫描。以这种方式,激光光斑的干涉图案的连续和相位真实的延续是可行的。
[0074]
在上述实施例的意义上,例如,第一状态可以对应于入射在第一区域上的激光束,而第二状态可以对应于入射在第二区域上的激光束。
[0075]
根据一个实施例,第一干涉图案和第二干涉图案重叠。例如,根据一个实施例,第
一干涉图案和第二干涉图案具有多个强度最大值和强度最小值,其在纵向上依次排列。根据一个实施例,第二干涉图案相对于第一干涉图纵向(或平行于纵向)偏移。此外,根据一个实施例,纵向对应于所述预定方向。
[0076]
如果存在至少两个线性独立的纵向(例如,根据一个实施例,在3光束干涉的情况下),定义第一距离和第二距离的预定方向平行于至少一个所述纵向。
[0077]
根据一个实施例,光学装置具有以传输方式工作(in transmission arbeitet)的至少一个光学元件(换言之,该至少一个光学元件是传输光学元件)。根据一个实施例,传输光学元件中的每个子束(即来自其辐射路径穿过传输光学元件的每个子束)的辐射路径的路径长度区段的变化小于
±
5%,特别是小于
±
1%,进一步地特别是小于
±
0.5%,其中路径长度区段的变化引起输入端处激光束状态的变化。根据一个实施例(即可选地但非必须地),至少两个子束(分束器通过激光束产生)中的所有子束穿过传输光学元件。
[0078]
根据一个实施例,关于传输光学元件的上述实施例适用于光学装置的每个传输光学元件。
[0079]
根据一个实施例,光学装置的分束器之后的每个传输光学元件的位于至少一个子束的辐射路径中的每个被照射的表面对围成最多10度的角,特别是最多5度的角度。在实验中已经发现较小的角度可以促进干涉图案的相位延续。
[0080]
根据一个实施例,光学装置针对至少两个子束中的至少一个子束定义适用以下条件的辐射路径:针对激光光斑的第一位置,辐射路径定义辐射路径的光路长度与辐射路径的几何路径长度之间的第一路径差;针对激光光斑的第二位置,辐射路径定义辐射路径的光路长度与辐射路径的几何路径长度之间的第二路径差。并且在该条件的有效范围内,适用以下的至少一项:(i)第一路径差与第二路径差的偏差小到满足所述条件;(ii)第一路径差与第二路径差的偏差小于激光束波长的二十倍,尤其小于十倍;(iii)第一路径差与第二路径差都小于10mm,特别是小于5mm。
[0081]
根据一个实施例,分束器之后的光学装置没有棱镜。
[0082]
不希望限制于理论,根据本发明人的当前理解,在改变激光束的状态或者改变激光光斑的位置时,辐射路径的光路长度和辐射路径的几何路径长度之间路径长度差的大偏差不利于有效范围或者甚至妨碍激光光斑的干涉图案的相位延续。
[0083]
根据一个实施例,第一路径长度差和第二路径长度差之间的偏差在上述意义上足够小的含义是:偏差小于激光束的波长的10%或者偏差导致干涉图案从理想相位的偏移小于在预定方向上两个相邻干涉最大值之间距离l的5%。
[0084]
根据一个实施例,光学装置的所有光学元件以反射方式工作;特别地,根据一个实施例,光学装置的所有光学元件仅以反射方式工作。换言之,根据另一实施例,除了分束器外,光学装置的所有光学元件都是反射元件。
[0085]
根据一个实施例,本技术中的术语“以反射方式工作(in reflexion arbeiten)”的含义是所讨论的光学元件具有基于入射电磁辐射反射的光学功能,并通过这种光学功能对光学装置的整体功能做出贡献。从这个意义上说,半透明的镜子也以反射方式工作。
[0086]
根据一个实施例,分束器是半透明镜。根据一个实施例,半透明镜是具有平坦表面的光传输介质,其中至少一层,特别是介电层堆叠,被涂敷到平坦表面之一(在输入侧),使得入射激光强度的特定部分被(有意)反射,另一部分(有意)透射。被反射的入射激光强度
的部分在本文中也称为反射激光辐射。透射的入射激光强度的部分在本文中也称为透射激光辐射。入射激光强度在本文中也称为激光束强度。在光传输介质的出射侧,可选地,根据一个实施例,还应用具有抗反射作用的介电层堆叠,使得已经进入介质的强度能够以低损耗再次离开。根据一个实施例,透射和反射的辐射具有相似(或甚至相同)的光束形状和/或相似(或甚至相同)的光束轮廓。此外,根据一个实施例,透射辐射和反射辐射具有相同的偏振。这具有以下优点:以后不必在光束之一中再次调整偏振。根据一个实施例,为了获得良好的干涉,两个子束需要相同的偏振。
[0087]
根据一个实施例,半透明镜被配置为使得入射激光强度的显著部分(大于10%)被反射和入射激光强度的显著部分(大于10%)被透射。有利地,激光束的光学传输介质具有低吸收性。
[0088]
根据一个实施例,分束器被配置为使得反射的激光辐射的强度和透射的激光辐射的强度大小相同。这种类型的分束器称为50:50分束器。根据另一实施例,分束器是非偏振50:50分束器。
[0089]
根据一个实施例,辐射板被设置和布置成使得激光束在入射到(输入端的)第一区域上时在至少两个子束中产生第一强度分布,并且在入射到(输入端的)第二区域时在所述至少两个子束中产生第二强度分布。根据一个实施例,第一强度分布和第二强度分布彼此相差不到10%。换言之,根据一个实施例,所述至少两个子束中的强度分布在10%的容差范围内与激光束的状态无关。
[0090]
根据一个实施例,通过本文所述的激光加工设备或本文所述的方法加工物体以实现具有根据本文公开的实施例的表面结构的物体。
[0091]
根据一个实施例,物体具有带有周期性表面结构的表面,其中该表面结构限定作为该表面结构的包络线的圆周线,并且其中该圆周线至少逐段地在圆周线区段中具有基本元素的周期性重复的形状,并且其中表面结构的周期性不同于圆周线区段的周期性。
[0092]
特别地,表面结构的边缘区域可以反映激光光斑的横截面形状(或者由此产生的加工光斑的横截面形状)。
[0093]
根据一个实施例,表面结构具有以下特征中的至少一项:(i)表面结构具有多个平行的沟槽;(ii)基本元素具有至少一个弧形区段(例如,单个或两个或更多个弧形区段);(iii)所述圆周线区段是第一圆周线区段,所述基本元素是第一基本元素,并且圆周线具有与第一圆周线区段相对的并且是第二基本元素的周期性重复的第二圆周线区段,并且其中所述表面结构的周期性不同于的第二圆周线区段的周期性。
[0094]
根据另一实施例,所述物体具有带有如下表面结构的表面,该表面结构相对于该表面具有最大深度延伸;表面结构从表面结构边缘的第一位置到第二位置的深度延伸增加到最大深度延伸的80%;第一位置与第二位置之间的距离至少为100μm。换言之,表面结构从表面结构边缘处的第一位置到第二位置的的深度延伸增加至最大深度延伸的最多80%,其中第一位置与第二位置之间的距离为100μm。
[0095]
从表面结构的边缘开始缓慢增加表面结构的深度延伸(仅在100μm或更多后才达到最大深度延伸的80%)可能在流动方面是有利的,特别是如果表面结构是肋条结构,特别是如本文所述的肋条结构。根据一实施例,如本文所述,深度延伸的缓慢增加至少在一个方向上进行,例如平行于表面结构所要流向的流动方向。
[0096]
详细说明
[0097]
下面参考附图描述本文公开的主题的示例性实施例。需要注意的是,在不同的图中,相似或相同的元素或部件部分地具有相同的附图标记,或具有仅在第一位不同的附图标记。与另一图中的相应特征或部件相同或至少在功能上相同的特征或部件仅在它们第一次出现时进行详细描述,相应的附图标记不重复。根据一个实施例,前面的定义适用于后面的实施例,反之亦然。此外,上文描述的特征和实施例可以与下文描述的特征和实施例组合。
[0098]
图1示意性地示出了根据本文公开的主题的实施例的光学装置100的功能原理。
[0099]
根据一个实施例,光学装置100具有用于接收激光束102的输入端101。根据一个实施例,光学装置100被配置为将激光束102分成至少两个(例如两束)子束104、204,并将子束104、204重新组合在一起以形成激光光斑106以在其中产生干涉图案。根据一个实施例,子束的辐射路径具有相同的长度或几乎相同的长度,例如在
±
5%的容差窗口内的相同长度。在光束直径有限的实际结构中,尤其是子束之间的角度导致干涉。
[0100]
根据一个实施例,所述两个子束的第一子束104具有第一光路长度i1并且所述子束的第二子束204具有第二光路长度i2。由此得到子束的路径长度差di=i2-i1。如本文描述的,该路径长度差di改变导致距离变化dp。根据一个实施例,激光光斑106被对准到表面107上。
[0101]
图2示出了根据本文公开的主题的实施例的激光加工设备108。
[0102]
根据一个实施例,激光加工设备108具有光学装置200。根据一个实施例,光学装置200具有分束器110,其将激光束102分成两个子束104、204。根据一个实施例,分束器110是半透明镜,例如如图2所示。根据一个实施例,光学装置200的输入端101由分束器110形成。根据另一实施例,光学装置200针对子束104、204中的每个定义辐射路径112、212。根据一个实施例,至少两条辐射路径包括第一辐射路径112和第二辐射路径212。根据另一实施例,至少一个辐射路径具有(例如每个辐射路径112、212)至少一个光学元件,例如至少一个镜114、214。根据一个实施例,如在图2中所示出的那样可以提供三个镜114、214。根据一个实施例,至少一个镜114、214定义相关辐射路径112、212通过光学装置200的路线。根据一个实施例,光学装置200被配置(例如通过布置和/或对准至少一个光学元件)以便将子束112、212重新组合在一起以形成激光光斑106。根据一个实施例,通过合适的光学元件将子束聚集在一起,例如反射镜214,例如如图2所示。
[0103]
根据一个实施例,光学装置200相对于物体的表面107定位,使得在表面107上产生激光光斑106和干涉图案,以便利用干涉图案加工表面107。例如,利用干涉图案来进行表面107的结构化,这也称为直接干涉结构化。
[0104]
根据一个实施例,激光加工设备具有用于产生激光束102的激光源116。根据另一实施例,激光源116布置在激光加工设备的外部并且能够与其耦合。
[0105]
根据一个实施例,激光束是co2激光束,特别是具有至少800w(800瓦)功率的co2激光束。因此,根据一个实施例,激光源是co2激光源。根据一个实施例,co2激光源被配置为以连续波或以《1ms(小于1毫秒)的脉冲持续时间运行。
[0106]
根据另一实施例,激光加工设备被设置成使得油漆表面,特别是固化的油漆表面结构化。
[0107]
根据另一实施例,激光加工设备具有至少一个可移动反射镜314和用于控制至少一个可移动反射镜314的致动器装置118。根据一个实施例,所述至少一个可移动反射镜314被布置为改变激光束在输入端101处的状态,例如改变激光束在输入端101处的位置和/或激光束102相对于输入端101的入射角。例如,通过转动所述至少一个可移动反射镜314,可以改变激光束102相对于输入端的位置和入射角,例如图2示出激光束在输入端处的第一状态(102处的实线)和激光束在输入端处的第二状态(102处的虚线)。此处,激光束102在第一状态下被定位在半透明镜110的第一区域119(根据一个实施例,其被视为光学装置的输入端)中并且在第二状态下被定位在半透明镜110的第二区域121中。
[0108]
根据一个实施例,光学装置200被配置为使得第一状态产生第一干涉图案并且第二状态产生第二干涉图,其中第二干涉图案在相位上延续第一个干涉图案。根据一个实施例,即使激光束在输入端101处的状态连续变化,(第一)干涉图案的这种相位延续也会发生,由此能够有效地实现尺寸增大的干涉图案,而在得到尺寸增大的干涉图案的同时实现干涉最大值和干涉最小值的所定义的相位关系。与散开单个激光光斑相比,相位延续的干涉图案实现更均匀的加工,因为单个的激光光斑通常具有高斯光束轮廓。根据一个实施例,通过每单位面积均匀集成的总强度来实现对表面的均匀加工,所产生的强度最大值同相(相位真实)。
[0109]
所得到的干涉图案例如可以通过在输入端101上偏转激光束102产生,也就是说,根据一个实施例,通过在分束器110上偏转激光束102产生。
[0110]
根据一个实施例,提供了光学元件128,特别是用于聚焦激光束的光学元件,例如作为光学装置的一部分或作为激光加工设备的一部分。根据一个实施例,用于聚焦激光束的光学元件是透镜,例如设置在至少一个可移动反射镜314和分束器110之间的透镜,例如如图2所示。根据另一实施例,光学元件128是焦点移位器。根据另一个实施例,在激光源和所述至少一个可移动反射镜314布置有光学元件228(例如作为光学元件128的替代或补充),特别是用于聚焦激光束的光学元件,例如,如两条虚线所示。
[0111]
根据另一实施例,激光加工设备108具有控制设备120,用于通过控制信号122控制激光加工设备的组件(例如致动器装置118和,如果存在的话,激光源116)。根据一个实施例,控制设备包括处理器设备124和用于存储计算机程序的存储设备126,所述计算机程序能够在处理器设备124上执行,用于由此实现本文中公开主题的实施例的功能。
[0112]
根据另一实施例,提供另一致动器装置130,用于使光学装置200和表面107彼此相对定位。例如,在大面积激光加工的情况下,这可能是有利的,其中例如产生的干涉图案在表面107上移动。根据一个实施例,所述另一致动器装置130可以由激光加工设备的控制设备120通过控制信号122予以控制,或者可选地由外部控制设备(图2中未示出)控制。应当理解,所述(另一)致动器装置130在附图中仅作为示例示出,特别是关于位置。例如可以规定,激光加工设备的光学装置以及必要时其它组件,例如所述至少一个可移动反射镜314、致动器装置118、光学元件128或光学元件228,可以相对于激光源116和表面107移动。例如,光学装置100(以及可选地光学元件228)可以安装在机械臂上,用于在表面107上方定位(并且必要时移动)这些组件。在这种情况下,机械臂形成致动器装置130或致动器装置130的一部分。
[0113]
图3示出了根据本文公开的主题的实施例的激光加工设备208的一部分。激光加工
设备208可以具有参考图2描述的激光加工设备108的一个或多个特征,即使相关特征未在图3中示出。
[0114]
根据一个实施例,激光加工设备208具有光学装置300。与参照图2描述的光学装置200不同,光学装置300在每个辐射路径112、212中具有两个反射镜114、214。此外,根据一实施例,用于在光束方向上聚焦激光束102的光学元件228布置在至少一个可移动反射镜314的前面。此外,根据一实施例,在至少一可移动反射镜314与分束器110(可采用半透明反射镜实现,例如如图3所示)之间不设置光学元件。
[0115]
图4示出了根据本文公开的主题的实施例的激光加工设备308的一部分。
[0116]
激光加工设备308可以具有已经参考图2描述的激光加工设备108的一个或多个特征,即使相关特征未在图4中示出。
[0117]
根据一个实施例,激光加工设备308具有光学装置400。根据一个实施例,光学装置的分束器110由衍射光学元件(doe)形成,其将激光束102分成至少两个子束104、204。
[0118]
根据一个实施例,所述衍射光学元件被配置为使得从其发出的至少两个子束104、204围成锐角,例如如图4中所示。
[0119]
根据一个实施例,至少两个子束104、204的辐射路径112、212中的每一个具有单个光学元件,例如单个反射镜214。
[0120]
参考图3和图4描述的光学装置300、400在辐射路径112、212需要相对较少的光学元件,然而缺点是在最后一个反射镜214上的入射角非常平坦,这可能导致相关子束104、204的畸变。
[0121]
图5示出了由根据本文公开的主题的实施例的激光加工设备产生的第一干涉图案108和第二干涉图案208。
[0122]
根据一个实施例,第一干涉图案108由激光光斑106形成,其中心132位于第一位置134处,而第二干涉图案208由激光光斑106形成,其中心132位于第二个位置136处。“激光光斑106的中心132位于特定位置(例如第一位置134)”的表述在此也缩写为“激光光斑106位于特定位置”的表述。因此,这两个公式被认为是等效的。根据一个实施例,在第一位置134和第二位置136处产生激光光斑106,其中针对第一位置134调整激光束在光学装置的输入端处的第一状态(根据一个实施例,关于激光束的位置和入射角),而针对激光光斑106的第二位置136调整激光束在光学装置的输入端处的第二状态。
[0123]
激光束的状态变化(例如入射角和位置的变化)因此导致激光光斑106的中心132的位置的位置变化142(本文也称为ds)。
[0124]
根据一个实施例,产生的激光光斑106的光学装置被配置为使得第二干涉图案208在相位上延续第一干涉图案108,例如如图5所示。在两光束干涉的情况下,例如在两个相邻干涉最大值之间的恒定距离138(这里也称为l)“也超出单个光束的边界”时,表示干涉图案的相位延续。
[0125]
因此,第二干涉图案208的干涉最大值140的相位位置与第一干涉图案108的干涉最大值140的相位位置一致。换言之,通过光学布置改变激光光斑106的中心132与第一位置134处的在预定方向144上紧邻的干涉最大值240之间的第一距离141以及在激光光斑106的中心132与第二位置136处的在预定方向144上紧邻的干涉最大值240之间的第二距离241。在这种情况下,第一距离141和第二距离241的差对应于距离变化dp。
[0126]
根据一个实施例,光学布置确保第一干涉图案的相位延续,用于连续的位置变化(至少在有效区域内,例如位置变化的有效范围)。这样在激光光斑106的中心132的位置从第一位置134到第二位置136的连续变化时,在第一干涉图案108和第二干涉图案208之间的区域的产生连续重叠(kontinuierliches)。在保证每个位置的相位精度的情况下,第一位置和第二位置之间也存在干涉最大值340(如图5中虚线所示),其与第一干涉图案108的干涉最大值140以及第二干涉图案208的干涉最大值140具有相同的相位关系。换言之,由第一位置134和第二位置136之间的连续的位置变化产生的所有干涉最大值140、240、340是同相的,例如如图5所示。
[0127]
图6以截面图示出了根据本文公开的主题的实施例的激光加工设备的光学装置100的一部分。
[0128]
根据一个实施例,光学装置100具有至少一个传输光学元件150,其位于例如图1的子束104的至少一个子束的辐射路径112中。根据一个实施例,传输光学元件150具有一对透射表面,其包括第一表面154和第二表面156。根据另一实施例,该对表面154、156形成角度158,根据一个实施例,该角度至多为10度。
[0129]
图7示出了根据本文公开的主题的实施例的物体160的一部分。
[0130]
根据一个实施例,物体具有表面107,该表面具有周期性表面结构162。根据一个实施例,表面结构162具有多个平行沟槽,其在图7中由多个平行线164示出。需要指出的是,线164并非旨在表示表面结构162的沟槽的尺寸,而仅旨在说明周期性。事实上,根据一个实施例,例如在肋条应用中,沟槽比保留在沟槽之间的肋条宽。在这个意义上,根据一个实施例,线164可以代表例如沟槽的中心线(或中心线)。根据一个实施例,表面结构为具有多个凹槽的凹槽结构,如wo 2018/197555 a1中所述,即与光滑表面相比,降低了表面流动阻力的表面结构。特别是关于肋条的应用、功能、形状、尺寸、特性等,明确参考wo 2018/197555 a1,其全部内容在此通过引用并入本文。
[0131]
正如通常用于肋条的那样,在一个实施例中,每个沟槽都具有侧壁。因此,两个相邻沟槽的相邻壁在两个沟槽之间形成肋的两个相互面对的侧翼。换句话说,根据一个实施例,多个沟槽在表面中产生多个肋条,这些肋条具有合适的尺寸时用作肋(即减少表面上的流动阻力),例如如上所述的wo 2018/197555 a1的描述。根据一个实施例,肋的侧面围成锐角。特别地,根据一个实施例,肋逐渐变细成一点。
[0132]
根据一个实施例,肋基本上彼此平行延伸并且特别地平行于表面上的预期流动的流动方向延伸。
[0133]
根据一个实施例,周期性表面结构162通过暴露于激光光斑而产生,其在图7中的第一位置由106处的虚线示出。根据一个实施例,表面结构162是通过在表面107上的不同位置产生激光光斑106而产生的。根据一个实施例,激光光斑在每个位置具有干涉图案,其在相位上延续激光光斑在第一位置的干涉图案,例如如图7所示。根据一个实施例,通过每个干涉图案加工表面107,其中每个干涉图案在表面107中产生加工光斑169。根据一个实施例,由干涉图案或者加工光斑169的依次排列产生表面结构162。如果激光源是脉冲激光源,则在光学装置(图7中未示出)的输入端上连续移动激光束时得到离散加工光斑169,其在合适地选择例如激光的脉冲频率或者激光束在光学装置的输入端上的移动速度时重叠并且彼此可以区分,例如如图7所示。
[0134]
根据一个实施例,加工光斑169可以沿着直线产生,例如沿表面107上方的方向167,例如如图7所示。
[0135]
因此,重叠的加工光斑169定义圆周线168,其是表面结构的包络线,并且根据一个实施例,至少在一个圆周线区段中,例如在图7中所示的圆周线区段170中,具有基本元素的周期性重复的形状,其中一些基本元素由图7中的参考数字171表示。根据一个实施例,基本元素至少逐段地呈弧形,例如呈圆弧形,如图7所示。根据另一实施例中,基本元素可以是一段椭圆或不同形状的基本元素。根据一个实施例,例如如果表面结构162经受流体,则弧形基本元素或基本元素的弧形部分可导致流体不沿直线进而在非常狭窄的输入端区域进入表面结构,而是通过在流动方向上延伸的输入端区域进入。这在流体技术上是有利的。
[0136]
根据一个实施例,表面结构162的周期性不同于圆周线区段170的周期性,例如如图7所示。根据一个实施例,表面结构162和圆周线区段170的周期性的差异源于表面结构162的周期性由至少两个子束的干涉定义,而圆周线区段170由激光光斑的尺寸和由此产生的加工光斑169的重叠定义。
[0137]
图8示出了根据本文公开的主题的实施例的另一物体260的一部分。
[0138]
根据一个实施例,物体260的表面107具有周期性表面结构162,其通过在两个相互线性独立的方向上移动激光光斑106而产生。例如,激光加工设备可以被配置为沿着曲折路径172移动激光光斑106,例如如图8所示。
[0139]
激光光斑106在两个线性独立的方向上的运动例如可以通过如下方式来实现:沿着平行于第一方向167的第一路径区段174定位激光光斑并且沿着倾斜于(例如垂直于)第一路径区段174的第二路径区段176定位激光光斑。此外可以规定,激光光斑106在相互线性独立的两个方向上的运动具有两个平行的路径区段,例如如图8所示的两个平行的路径段174、178。根据一个实施例,在两个平行的路径区段中沿相反方向进行运动,在图8中以182表示,由此例如可以实现曲折路径,例如在图8中所示。根据一个实施例,激光光斑在平行路径区段中的移动始终在相同的方向上进行(在图8中未示出)。对于平行路径区段上的激光光斑的重叠来说需要(沿着第二路径区段,在图8中未示出)返回运动,在所述返回运动期间根据一个实施例激光束被关闭,使得在反向运动期间不产生激光光斑。此外,根据一个实施例可以规定,沿着第二路径区段176关闭激光束,使得沿着第二路径区段不产生激光光斑。例如可以规定,仅仅在路径区段的终点,例如在第二路径区段176的终点,接通激光束并且因此在终点中产生激光光斑,例如如图8中所示。
[0140]
根据一个实施例,激光光斑沿着例如平行路径区段174、178的平行路径区段的定位通过在光学装置的输入端上移动激光束来产生,而激光光斑倾斜于平行路径区段,例如沿着路径区段176、180的移动通过相对于参考点180来移动表面107来进行。这所具有的优点是可以加工较大表面。相对于光学装置来移动表面107例如可以连续地进行,其中根据一个实施例,为了实现预定路径(例如图8中所示出的弯曲的路径),激光加工设备被配置通过光学装置相对于参考点184的运动来实现正确运动并且由此沿着预定路径定位激光光斑。根据一个实施例,不再相对于参考点184移动表面107,而是激光加工设备被配置通过在光学装置的输入端上移动激光束来产生倾斜于平行路径区段(例如垂直于路径区段)的移动。总之,致动器装置118和至少一个可移动反射镜314例如可以被配置用于实现在两个相互线性独立的方向上移动激光束102。根据一个实施例,致动器装置118和所述至少一个可移动
反射镜314可以通过本身已知的电流计扫描仪形成。
[0141]
根据一个实施例,表面结构162定义引入圆周线的第一圆周线区段170,其中圆周线区段170具有基本元素171的周期性重复的形状。根据另一实施例,表面结构162具有第二圆周线区段172,其具有基本元素171的周期性重复的形状,其中第二圆周线区段172与第一圆周线区段170相对,例如如图8中所示。根据一个实施例,第二圆周线区段172为第一圆周线区段170的镜像,例如如图8中所示。
[0142]
当然,在一定条件下,圆周线区段没有基本元素的(可识别的)周期性重复的的形状,例如当在沿着第一路径区段174定位激光光斑106期间连续地(不是脉冲式地)输出激光束时,或者当各个脉冲的干涉图案的重合度非常高时。不过在这种情况下,例如当在方向188上定位该其它圆周线区段185、186时关闭连续的激光束,则另一圆周线区段185、186可以完全具有基本元素的周期性重复的形状。
[0143]
图9示出了根据本文公开的主题的实施例的物体360的一部分。
[0144]
类似于图8,图9还示出了具有表面107的物体360,该表面具有周期性表面结构162,该表面结构定义圆周线是表面结构162的包络线。根据一个实施例,圆周线168具有第一圆周线区段170和第二圆周线区段172,其是基本元素171的周期性重复,其中根据一个实施例,基本元素171由单个弧形部分组成,例如如图9所示。根据另一实施例,圆周线168所具有的第三圆周线区段185是基本元素183的周期性重复,其中基本元素183由两个弧形区段构成,例如如在图9中所示。根据另一实施例,圆周线168具有第四圆周线区段186,其是另一个基本元素187的周期性重复,其中另一个基本元素187由两个弧形部分组成,例如如图9所示。
[0145]
图10示出了图9中的表面结构162的一部分沿图9中的剖面线xx的剖视图。
[0146]
根据一个实施例,表面107由漆层109形成,漆层109形成在物体360的主体上(该主体未在图10中示出)。根据一个实施例,漆层109是固化漆层,例如飞机的漆层。根据一个实施例,表面结构162具有在图10的截面图中作为示例示出的多个沟槽189。根据一个实施例,表面结构并且因此至少一个沟槽189具有最大深度(或深度)190,根据一个实施例,最大深度小于漆层109的厚度191。
[0147]
根据另一实施例,表面结构162的深度延伸从表面结构162边缘处的第一位置198至最接近的第二位置199增加到最大深度延伸的80%。在该意义上,“最接近”意味着如果存在多个第二位置(其中深度延伸达到最大深度延伸的80%),则选择到第一位置198距离最小的那些第二位置。根据另一实施例,第一位置198和第二位置199之间的距离163为至少100μm,例如至少为300μm或至少500μm。
[0148]
例如,根据一实施例,深度190在沟槽189的边缘区域192中减小并连续地接近零,即接近表面107的水平,例如如图10所示。根据一个实施例,表面结构162在其边缘区域192中的设计是由于激光的穿刺行为,因为通常激光光斑在边缘区域的强度低于在激光光斑的中心(激光光斑的干涉图案的平均值)的强度,所以激光光斑在边缘区域192中的侵蚀较低。例如可以通过在表面形成一层漆并使用co2激光进行加工来实现具有本文所述特征的穿刺行为。
[0149]
根据一个实施例,漆表面为wo 2018/197555 a1中描述的漆表面。特别是,油漆表面由基于聚合物的油漆形成,特别是基于聚氨酯或丙烯酸或环氧树脂。根据一个实施例,漆
为清漆或面漆。根据个实施例,漆的吸收光谱与co 2激光器的发射光谱重叠。根据一个实施例,co 2激光器可以以在9μm和11μm之间的范围内的波长运行。
[0150]
根据一个实施例,漆包含影响漆的颜色的颜料。通常,面漆包含此类颜料。根据另一实施例,颜料改变漆对激光束的吸收行为。根据一个实施例,激光的穿刺行为会受到颜料类型和浓度的影响。
[0151]
根据一个实施例,漆是布置在第二层漆上的第一层漆。第一层漆的层因此也被称为面漆层并且第二层漆的层因此也被称为底漆层。根据一个实施例,面漆层是透明漆层或顶部漆层,特别是基于聚氨酯。根据另一实施方式,底漆层通过环氧体系(例如固化环氧树脂)或通常由塑料制成。
[0152]
图11示出了根据本文公开的主题的实施例的表面结构162的一部分的平面图。
[0153]
如上所述,表面结构162定义包络线,在此也称为圆周线168。类似于上面已经解释的图,在图11中仅通过多条平行线示意性地示出表面结构162,其中每条线代表表面中的沟槽189(图11中未示出)。
[0154]
图12和图13示出了图11的表面结构162沿图11中的剖面线xii-xii和xiii-xiii的剖视图。此外,通过箭头193说明将对应的剖面线分配给图12和图13。
[0155]
根据一个实施例,平行沟槽189在边缘区域192中具有较浅的深度(在图11中用阴影线示出),例如从图11的概要与图13和图12可以看出。
[0156]
从表面结构的一个边缘增加的深度也可以在图12和图13中看到。应当理解,如果在最大深度延伸的80%处,表面结构没有凹陷,则对应于最大深度延伸的80%的第二位置199也可以通过内插值或外插值来确定。根据一个实施例,例如可以规定,从第一位置开始,在沿着表面结构的深度延伸的最大梯度的方向上确定第二位置。
[0157]
图14示出了根据本文公开的主题的实施例的激光加工设备408。
[0158]
根据一个实施例,激光加工设备408具有根据本文公开的一个或多个实施例形成的光学装置500。
[0159]
根据另一实施例,激光加工设备408具有扫描装置194,其例如可具有根据本文公开的物体的实施例的致动器装置和至少一个可移动反射镜。根据一个实施例,扫描装置194由电流计扫描仪构成。根据一个实施例,扫描装置194被设置成将激光束102引导到光学装置500的输入端101上,或在光学装置500的输入端101上移动激光束102。
[0160]
根据另一实施例,激光加工设备408具有可耦合到激光源116的激光输入端195。根据一个实施例,激光输入端195由扫描装置194形成,例如如图14所示。根据一个实施例,激光源116在激光加工设备408的外部。例如,如果激光加工设备408安装在机械臂上,则激光源116可以定位在地板上的机械臂旁边并且光耦合到激光输入端195。根据另一实施例(图14中未示出),激光源116是激光加工设备408的一部分。
[0161]
根据一个实施例,光学装置使激光束102产生至少两个子束112、212,其在激光光斑106中产生干涉图案。
[0162]
根据一个实施例,物体160相对于光学装置500定位以使得激光光斑106位于物体160的表面107上。
[0163]
根据一个实施例,另一致动器装置130被分配给激光加工设备,光学装置500和物体160可以通过该致动器装置相对于彼此移动,例如以便使得仅通过在光学装置500的输入
端101上移动激光束102不能被覆盖的物体160的表面部分结构化。
[0164]
根据一个实施例,另一致动器装置130具有至少一个第一致动器196,物体160可以利用该第一致动器相对于参考点184移动。根据一个实施例,所述另一致动器装置130还具有至少一个第二致动器197,激光加工设备408利用该第二致动器相对于参考点184是可移动的。根据一个实施例,所述至少一个第二致动器197由机械臂形成。
[0165]
需要注意的是,本文公开的实体(例如,设备、特征、方法步骤、控制设备、致动器装置、光学装置、致动器、光学元件等)不限于如在一些实施例中描述的专用实体。相反,本文公开的主题可以以各种方式实施,同时仍提供所公开的特定功能。
[0166]
特别地,本发明描述的主题可以以不同方式以设备级别,以方法级别或以软件级别来提供,同时仍提供指定的功能。还应当注意,根据实施例,可以为本发明公开的每个功能提供单独的实体。根据其它实施例,实体可以被配置为提供如本发明所述的两个或更多个功能。例如,根据一个实施例,图2中的两个反射镜214的功能可以由单个顶盖边缘反射镜来实现。根据其它实施例,两个或更多个实体可以被配置为一起提供如本发明所述的功能。
[0167]
需要指出的是,本发明在附图中描述的实施方式仅代表了本发明公开的主题的可能的实施例变体的有限选择。可以以合适的方式将各个实施例的特征彼此组合,从而本领域技术人员可以认为多个不同的实施例具有在此所述的实施例变体。还应该提到的是,像“一个”或“一种”这样的术语不排除复数。诸如“包含”或“具有”等术语不排除进一步的特征或工艺步骤。术语“具有”或“包括”或“包含”均包括“具有”和“由
……
组成”两种含义。
[0168]
还应该指出的是,虽然附图中的示例对象和元件(例如激光加工设备、光学组件等)示出了本发明公开的对象的几个实施例的特定组合,但是实施例的任何其他组合也是可能的并且被视为由本技术公开。
[0169]
本文公开的主题的实施例的有利组合可概括如下:
[0170]
一种激光加工设备,包括:光学装置;其中光学装置具有用于接收激光束的输入端;其中光学装置具有分束器,该分束器将激光束分成至少两个子束;其中光学装置将子束重新组合在一起以形成激光光斑并在激光光斑中产生干涉图案;其中激光束在输入端处的第一状态产生第一干涉图案并且激光束的第二状态产生第二干涉图案;其中第一状态和第二状态至少区别于以下之一(i)激光束在输入端处的位置和(ii)激光束相对于输入端的入射角;并且其中光学装置被配置为使得第二干涉图案在相位上延续第一干涉图案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。