技术特征:
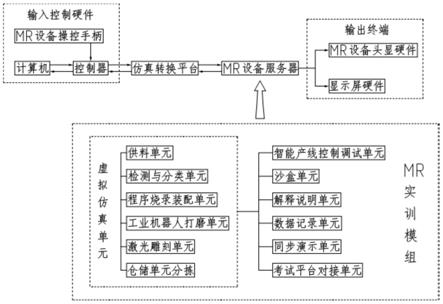
1.一种智能产线mr虚拟训练系统,其特征在于,包括输入控制硬件、mr设备服务器和输出终端;所述输入控制硬件与所述mr设备服务器之间通信连接;且所述输入控制硬件与所述mr设备服务器之间设有仿真转换平台,用于输入控制硬件与mr设备服务器之间全程进行信号实时交互通讯转换工作;所述mr设备服务器与所述输出终端之间通信连接;所述mr设备服务器装有mr实训模组;所述mr实训模组包括:虚拟仿真单元,用于搭建智能产线虚拟教学场景技术系统;和智能产线控制调试单元,用于配合输入控制硬件、虚拟仿真单元及输出终端进行智能产线柔性工艺规划设计的控制调试、验证训练教学;以及沙盒单元,用于配合输入控制硬件、虚拟仿真单元及输出终端进行虚拟仿真单元的安装及接线调试教学。2.根据权利要求1所述的智能产线mr虚拟训练系统,其特征在于,还包括:解释说明单元,用于配合输入控制硬件与输出终端展现并解读虚拟仿真单元;和同步演示单元,用于与输出终端之间通信相连进行同步演示;和数据记录单元,用于对接虚拟仿真单元记录实训操作数据;以及考试平台对接单元,用于对接数据记录单元调用虚拟仿真单元的实训操作数据并上传至考试平台。3.根据权利要求2所述的智能产线mr虚拟训练系统,其特征在于,所述输入控制硬件包括计算机、控制器及mr设备操控手柄,所述输出终端包括mr设备头显硬件和显示屏硬件;所述计算机与所述控制器之间通信连接,用于通过计算机完成对控制器的可编辑控制程序输入,并接收来自于控制器的信息反馈;所述控制器与所述mr设备服务器之间设有通信模块,用于通过通信模块在控制器与mr设备服务器之间建立信息中转交互通信连接,并基于可编辑控制程序通过控制器驱动装于mr设备服务器的mr实训模组动作;所述mr设备操控手柄与所述mr设备服务器之间通信连接,用于通过mr设备操控手柄向mr实训模组传递实训操作信息;所述mr设备头显硬件与所述mr设备服务器之间通信连接,用于通过ui文字、语音方式对装于mr设备服务器的mr实训模组的结构/部件进行展示;所述显示屏硬件与所述mr设备服务器之间通信连接,用于接入同一网络并基于同步演示单元同步显示mr设备头显硬件中的虚拟内容。4.一种智能产线mr虚拟训练方法,利用如权利要求3所述的智能产线mr虚拟训练系统,其特征在于,通过输入控制硬件驱动装于mr设备服务器的mr实训模组动作来进行智能产线生产设备的控制调试、验证以及接线安装训练教学。5.根据权利要求4所述的智能产线mr虚拟训练方法,其特征是,具体过程为:通过计算机向控制器输入可编辑控制程序,控制器基于可编辑控制程序向mr设备服务器发送控制信号;通过位于控制器和mr设备服务器之间的仿真转换平台将控制器发出的电信号转换生
成mr设备服务器识别的数字信号,来驱动mr实训模组中的智能产线控制调试单元工作,智能产线控制调试单元调动虚拟仿真单元产生控制信号下的相应动作,同时智能产线控制调试单元将虚拟仿真单元的动作过程同步传输展示至mr设备头显硬件,并由智能产线控制调试单元给出虚拟仿真单元动作的数字反馈信号,数字反馈信号通过仿真转换平台转换成电信号回传给控制器,并由控制器继续回传至计算机,完成输入控制硬件与mr设备服务器之间全程进行信号的实时交互通讯转换工作;在电信号回传至输入控制硬件时,根据虚拟仿真单元的实时动作信息确定后续执行的控制内容,基于可编辑控制程序再次通过计算机向控制器输入新的可编辑控制程序,按步序完成智能产线控制调试单元对于智能产线柔性工艺规划设计的控制调试、验证训练教学。6.根据权利要求4所述的智能产线mr虚拟训练方法,其特征是,具体过程为:通过沙盒单元针对虚拟仿真单元中不同的单元设备结构进行安装点录入、接线点录入,在每个单元设备结构配置唯一一条正确安装途径;通过mr实训模组中的沙盒单元基于不同的单元设备结构分别提供可拆装的若干个单元结构部件与线,并通过mr设备头显硬件显示若干个单元结构部件与线的虚拟内容,通过mr设备操控手柄配合mr设备头显硬件对若干个单元结构部件基于安装点进行安装,并基于接线点相应接线进行调试;通过安装与接线的调试找到唯一一条的正确安装途径,分别完成各个单元设备结构的安装及接线训练教学。7.一种智能产线mr虚拟训练方法,利用如权利要求3所述的智能产线mr虚拟训练系统,其特征在于,通过mr设备操控手柄发出的射线指向虚拟仿真单元中不同的单元设备结构或一个单元设备结构拆解后的若干个单元结构部件;基于解释说明单元,mr设备头显硬件中通过文字说明ui并提供语音解读展现射线指向的单元设备结构/单元结构部件的结构原理功能;通过mr设备操控手柄操作,将单元设备结构拆解后的若干个单元结构部件之一从单元设备结构上拆除下来360度旋转观看教学。8.一种智能产线mr虚拟训练方法,利用如权利要求3所述的智能产线mr虚拟训练系统,其特征在于,智能产线mr虚拟训练系统采用两种工作模式,具体为训练模式与考核模式,根据不同模式的需求,数据记录单元会自动记录操作的控制调试验证数据、设备安装及接线调试数据、考核结果数据、最终得分数据各项数据;若为训练模式下,系统自动对接解释说明单元、智能产线控制调试单元以及沙盒单元;若为考核模式下,系统自动对接考试平台对接单元,考试平台对接单元根据考试平台开放的接口与考试平台进行对接,用于对接数据记录单元将操作过程进行记录打分,并调用虚拟仿真单元的实训操作数据上传至考试平台;考核模式下,系统还自动对接同步显示单元,显示屏硬件会自启动录制功能,对所有操作过程进行录像,作为评判复审依据;考核模式下,系统还自动对接解释说明单元、智能产线控制调试单元以及沙盒单元;考试平台对接单元根据操作过程打分的分值,筛选出失分点对应的失误操作过程,并将失误操作过程分别对接拟合至解释说明单元、智能产线控制调试单元及沙盒单元,在重
新进入训练模式时,通过解释说明单元或智能产线控制调试单元或沙盒单元进行训练教学,优先进入对应失误操作过程的操作训练,并在操作训练正确完成后的过程与失误操作过程同屏在mr设备头显硬件显示,更直观地定位失误操作过程的逻辑判断起因及知识匮乏点。9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求4至6任一项所述智能产线mr虚拟训练方法的步骤,或者,所述处理器执行所述计算机程序时实现如权利要求7所述智能产线mr虚拟训练方法的步骤,或者,所述处理器执行所述计算机程序时实现如权利要求8所述智能产线mr虚拟训练方法的步骤。10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求4至6任一项所述智能产线mr虚拟训练方法的步骤,或者,所述计算机程序被执行时实现如权利要求7所述智能产线mr虚拟训练方法的步骤,或者,所述计算机程序被执行时实现如权利要求8所述智能产线mr虚拟训练方法的步骤。
技术总结
本发明提供智能产线MR虚拟训练系统、方法、电子设备及存储介质,涉及MR技术智能产线训练技术领域,包括输入控制硬件、MR设备服务器和输出终端;输入控制硬件与MR设备服务器之间通信连接;输入控制硬件与MR设备服务器之间设有仿真转换平台,用于输入控制硬件与MR设备服务器之间全程进行信号实时交互通讯转换工作;MR设备服务器与输出终端之间通信连接。通过利用MR混合现实技术,将大型设备的智能产线虚拟化,用硬件驱动MR模型操作可以进行机电联调的控制训练,又可在虚拟现实中完成机械拆装,电气接线等训练,既解决了设备不足,无法满足全班授课实训的问题,可彻底避免设备拆装、接线、调试训练带来的隐患,还可以解决场地不足的问题。足的问题。足的问题。
技术研发人员:李海霞 鲁慧娟 于泓涵 吴声硕 易缘督
受保护的技术使用者:中船舰客教育科技(北京)有限公司
技术研发日:2021.11.15
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。