技术特征:
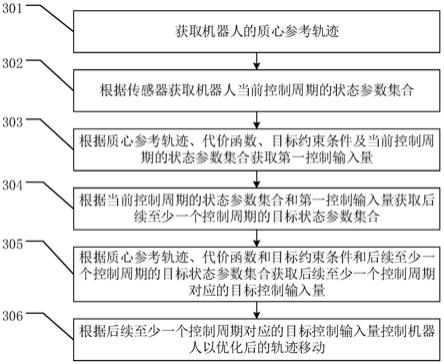
1.一种四足机器人质心轨迹规划方法,其特征在于,所述方法包括:获取机器人的质心参考轨迹;根据传感器获取所述机器人当前控制周期的状态参数集合;根据所述质心参考轨迹、代价函数、目标约束条件及所述当前控制周期的状态参数集合获取第一控制输入量;根据所述当前控制周期的状态参数集合和所述第一控制输入量获取后续至少一个控制周期的目标状态参数集合;根据所述质心参考轨迹、代价函数和目标约束条件和所述后续至少一个控制周期的目标状态参数集合获取后续至少一个控制周期对应的目标控制输入量;根据所述后续至少一个控制周期对应的目标控制输入量控制机器人以优化后的轨迹移动。2.根据权利要求1所述的方法,其特征在于,所述根据所述质心参考轨迹、代价函数、目标约束条件及所述当前控制周期的状态参数集合获取第一控制输入量包括:确定所述质心参考轨迹中的参考状态参数集合;根据所述参考状态参数集合、代价函数、目标约束条件及所述当前控制周期的状态参数集合获取第一控制输入量。3.根据权利要求1所述的方法,其特征在于,所述目标约束条件包括:起始状态约束、足端力约束、支撑力约束和动力学约束;所述起始状态约束为所述机器人的起始位置和起始姿态;所述足端力约束为所述机器人的足端力在摩擦锥内;所述支撑力约束为所述机器人的支撑脚速度为0;所述动力学约束为轨迹上相邻两个点的状态的差值等于动力学方程在两个时刻间的积分量。4.根据权利要求1所述的方法,其特征在于,所述代价函数为所述机器人的质心速度与控制输入量之间的关系函数。5.根据权利要求1至4中任一项所述的方法,其特征在于,所述状态参数集合包括所述机器人质心的位置、姿态角、速度、角速度以及足端位置,所述控制输入量包括所述机器人的足端力以及足端速度。6.一种四足机器人质心轨迹规划装置,其特征在于,所述装置包括:第一获取单元,用于获取机器人的质心参考轨迹;第二获取单元,用于根据传感器获取所述机器人当前控制周期的状态参数集合;第三获取单元,用于根据所述质心参考轨迹、代价函数、目标约束条件及所述当前控制周期的状态参数集合获取第一控制输入量;第四获取单元,用于根据所述当前控制周期的状态参数集合和所述第一控制输入量获取后续至少一个控制周期的目标状态参数集合;第五获取单元,用于根据所述质心参考轨迹、代价函数和目标约束条件和所述后续至少一个控制周期的目标状态参数集合获取后续至少一个控制周期对应的目标控制输入量;控制单元,用于根据所述后续至少一个控制周期对应的目标控制输入量控制机器人以优化后的轨迹移动。
7.根据权利要求6所述的装置,其特征在于,所述第三获取单元具体用于:确定所述质心参考轨迹中的参考状态参数集合;根据所述参考状态参数集合、代价函数、目标约束条件及所述当前控制周期的状态参数集合获取第一控制输入量。8.根据权利要求6所述的装置,其特征在于,所述目标约束条件包括:起始状态约束、足端力约束、支撑力约束和动力学约束;所述起始状态约束为所述机器人的起始位置和起始姿态;所述足端力约束为所述机器人的足端力在摩擦锥内;所述支撑力约束为所述机器人的支撑脚速度为0;所述动力学约束为轨迹上相邻两个点的状态的差值等于动力学方程在两个时刻间的积分量。9.一种四足机器人质心轨迹规划装置,其特征在于,所述装置包括:处理器、存储器、输入输出单元以及总线;所述处理器与所述存储器、所述输入输出单元以及所述总线相连;所述存储器保存有程序,所述处理器调用所述程序以执行如权利要求1至5中任一项所述方法。10.一种计算机可读存储介质,所述计算机可读存储介质上保存有程序,所述程序在计算机上执行时执行如权利要求1至5中任一项所述方法。
技术总结
本申请公开了一种四足机器人质心轨迹规划方法、装置及存储介质,用于提高机器人在行进过程中的稳定性。本申请方法包括:获取机器人的质心参考轨迹;根据传感器获取所述机器人当前控制周期的状态参数集合;根据所述质心参考轨迹、代价函数、目标约束条件及所述当前控制周期的状态参数集合获取第一控制输入量;根据所述当前控制周期的状态参数集合和所述第一控制输入量获取后续至少一个控制周期的目标状态参数集合;根据所述质心参考轨迹、代价函数和目标约束条件和所述后续至少一个控制周期的目标状态参数集合获取后续至少一个控制周期对应的目标控制输入量;根据所述后续至少一个控制周期对应的目标控制输入量控制机器人以优化后的轨迹移动。器人以优化后的轨迹移动。器人以优化后的轨迹移动。
技术研发人员:李震
受保护的技术使用者:深圳鹏行智能研究有限公司
技术研发日:2021.10.14
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。