1.本实用新型涉及管道焊接技术领域,具体涉及一种用于对管道焊接处进行监测的监理机器人。
背景技术:
2.焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。
3.我国石油、天然气正处于持续高速发展阶段,通常通过管道进行运输,管道运输过程中的油气泄露会对人们的生存环境造成很大的威胁,因此,确保管道焊接端的焊接质量是必须的。
4.原管道焊接监测均需人工手持探伤设备进行现场实际测试,但现场环境恶略、管道尺寸大,人员检测劳动量巨大,同时监测结果受检测人员经验影响。因此,能在节约人力投入的同时保证管道焊接质量数据的准确性,是现阶段本技术人员亟需解决的问题。
技术实现要素:
5.本实用新型需要解决的技术问题是提供一种管道焊接监理机器人控制系统,不但可节约人力投入,还能保证管道焊接质量数据的准确性。
6.为解决上述技术问题,本实用新型所采取的技术方案如下。
7.管道焊接监理机器人控制系统,包括用于监测管道焊接质量的机器人本体,机器人本体上设置有用于控制机器人本体作业的控制系统,其特征在于:所述控制系统包括电脑主机、用于检测管道缺陷的超声波探伤仪、用于采集管道图像信息的工业相机和用于控制机器人本体运动路径的运动控制单元;所述超声波探伤仪的输出端和工业相机的输出端与电脑主机电性连接,运动控制单元与电脑主机通信连接。
8.优选的,所述运动控制单元包括plc控制器、伺服驱动器和伺服电机;所述plc控制器采用485总线标准通过双绞线电缆与电脑主机通信连接,plc控制器的输出端通过can总线标准连接伺服驱动器的输入端,伺服驱动器的输出端连接伺服电机的受控端。
9.优选的,所述plc控制器通过内置的模数转换模块连接有用于实时反馈位置信息的激光位置传感器。
10.优选的,所述电脑主机通过内置的无线发送与接收模块连接有用于工作人员通过查看焊接现场情况和焊缝质量来下发指令控制机器人本体移动进行不同位置监测的电脑端。
11.由于采用了以上技术方案,本实用新型所取得技术进步如下。
12.本实用新型实现了完全自主替代人员检测;通过引入的工业相机,不但可实现管道焊缝的直观检测,还能将图像保存,增加管道焊接可追溯性和提高焊接质量;通过设置的伺服电机系统,可实现自动化,减少人员管道内巡检,节省大量劳动力的同时还能保证人员安全;通过探伤结果直接保存设备电脑,不但减少人员操作与判断,保证数据准确,还能根
据等级要求进行标准判定增加系统自动检测功能。
附图说明
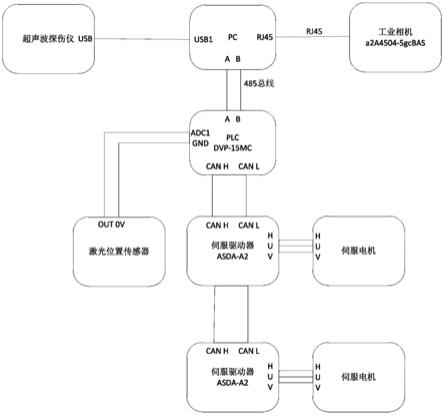
13.图1为本实用新型的电路原理框图
具体实施方式
14.下面将结合附图和具体实施方式对本实用新型进行进一步详细说明。
15.一种管道焊接监理机器人控制系统,结合图1所示,包括机器人本体,机器人本体用于监测管道焊接的质量,机器人本体上设置有控制系统,控制系统用于控制机器人本体作业,控制系统包括电脑主机、超声波探伤仪、工业相机和运动控制单元,其中超声波探伤仪用于检测管道的缺陷;工业相机用于采集管道的图像信息;运动控制单元用于控制机器人本体的运动路径;超声波探伤仪的输出端和工业相机的输出端与电脑主机电性连接,运动控制单元与电脑主机通信连接。
16.超声波探伤是利用超声能透入金属材料的深处,并由一截面进入另一截面时,在界面边缘发生反射的特点来检查零件缺陷的一种方法。当超声波束自零件表面由探头通至金属内部,遇到缺陷与零件底面时就分别发生反射波,在荧光屏上形成脉冲波形,根据这些脉冲波形来判断缺陷位置和大小。超声波探伤仪通过usb总线标准连接电脑主机,从而将判断缺陷位置和大小的脉冲波形传送至电脑主机。
17.工业相机又俗称摄像机,相比于传统的民用相机(摄像机)而言,它具有高的图像稳定性、高传输能力和高抗干扰能力等。工业相机通过网线连接电脑主机的rj45接口,从而将采集到的管道图像信息传送至电脑主机。
18.运动控制单元包括plc控制器、伺服驱动器和伺服电机,其中plc控制器为台达专业运动控制plc dvp
‑
15mc,采用485总线标准通过双绞线电缆与电脑主机通信连接;伺服驱动器为asda—a2伺服驱动器,plc控制器的输出端通过can总线标准连接伺服驱动器的输入端,伺服驱动器的输出端连接伺服电机的受控端。伺服电机和伺服驱动器的数量可根据移动需要配置,dvp
‑
15mc系列控制器通过canopen(motor)接口最大可控制24路电机,并支持速度、位移、扭矩等运动指令及通过can总线实现电机的完全控制。
19.plc控制器通过内置的模数转换模块连接有激光位置传感器,激光位置传感器用于实时反馈位置信息,plc控制器通过反馈的位置信息测算管道直径与位置。
20.电脑主机通过工业相机实时读取现场焊接图像,并通过超声波探伤仪监测焊缝内部,可自动检测焊接质量。电脑主机的内部还设置有无线发送与接收模块,并通过无线发送与接收模块连接有电脑端,电脑端设置在工作人员的办公区,工作人员可通过电脑端查看焊接现场情况和焊缝质量来下发指令控制机器人本体移动进行实现不同位置监测。
21.本实用新型在使用时,通过引入的工业相机,不但可实现管道焊缝的直观检测,还能将图像保存,增加管道焊接可追溯性,提高焊接质量;通过设置的伺服电机系统,可实现自动化,减少人员管道内巡检,节省大量劳动力的同时保证人员安全;通过探伤结果直接保存设备电脑,不但减少人员操作与判断,保证数据准确,还能根据等级要求进行标准判定增加系统自动检测功能。
技术特征:
1.管道焊接监理机器人控制系统,包括用于监测管道焊接质量的机器人本体,机器人本体上设置有用于控制机器人本体作业的控制系统,其特征在于:所述控制系统包括电脑主机、用于检测管道缺陷的超声波探伤仪、用于采集管道图像信息的工业相机和用于控制机器人本体运动路径的运动控制单元;所述超声波探伤仪的输出端和工业相机的输出端与电脑主机电性连接,运动控制单元与电脑主机通信连接。2.根据权利要求1所述的管道焊接监理机器人控制系统,其特征在于:所述运动控制单元包括plc控制器、伺服驱动器和伺服电机;所述plc控制器采用485总线标准通过双绞线电缆与电脑主机通信连接,plc控制器的输出端通过can总线标准连接伺服驱动器的输入端,伺服驱动器的输出端连接伺服电机的受控端。3.根据权利要求2所述的管道焊接监理机器人控制系统,其特征在于:所述plc控制器通过内置的模数转换模块连接有用于实时反馈位置信息的激光位置传感器。4.根据权利要求1所述的管道焊接监理机器人控制系统,其特征在于:所述电脑主机通过内置的无线发送与接收模块连接有用于工作人员通过查看焊接现场情况和焊缝质量来下发指令控制机器人本体移动进行不同位置监测的电脑端。
技术总结
本实用新型公开了一种管道焊接监理机器人控制系统,包括用于监测管道焊接质量的机器人本体,机器人本体上设置有用于控制机器人本体作业的控制系统,其特征在于:所述控制系统包括电脑主机、用于检测管道缺陷的超声波探伤仪、用于采集管道图像信息的工业相机和用于控制机器人本体运动路径的运动控制单元;所述超声波探伤仪的输出端和工业相机的输出端与电脑主机电性连接,运动控制单元与电脑主机通信连接。本实用新型不但实现了完全自主替代人员检测,还能保证管道焊接质量数据的准确性。还能保证管道焊接质量数据的准确性。还能保证管道焊接质量数据的准确性。
技术研发人员:王峰
受保护的技术使用者:廊坊中油朗威工程项目管理有限公司
技术研发日:2021.06.25
技术公布日:2021/11/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。